
Lezione 4: Codifica del sensore di oggetti
Nell'ultima lezione hai imparato a conoscere il sensore di oggetti e hai raccolto le percentuali di riflettività di dischi e cubi. Ora utilizzeremo questi valori per creare un progetto in VEXcode per arrestare il trasportatore di uscita quando un disco viene rilevato dal sensore di oggetti.
In questa lezione imparerai:
- Configurare il sensore di oggetti in VEXcode.
- Scopri come utilizzare gli operatori di confronto in VEXcode.
- Creare un progetto per spostare un disco dal trasportatore di ingresso al trasportatore di uscita utilizzando il feedback del sensore di oggetti.
Alla fine di questa lezione, avrai sviluppato il progetto della lezione precedente per arrestare il trasportatore di uscita quando il disco viene rilevato dal sensore di oggetti.
Modifica del progetto
Inizierai modificando il tuo progetto dall'attività della lezione 2 dell'Unità 4 per preparare l'aggiunta dei comandi relativi al sensore di oggetti.
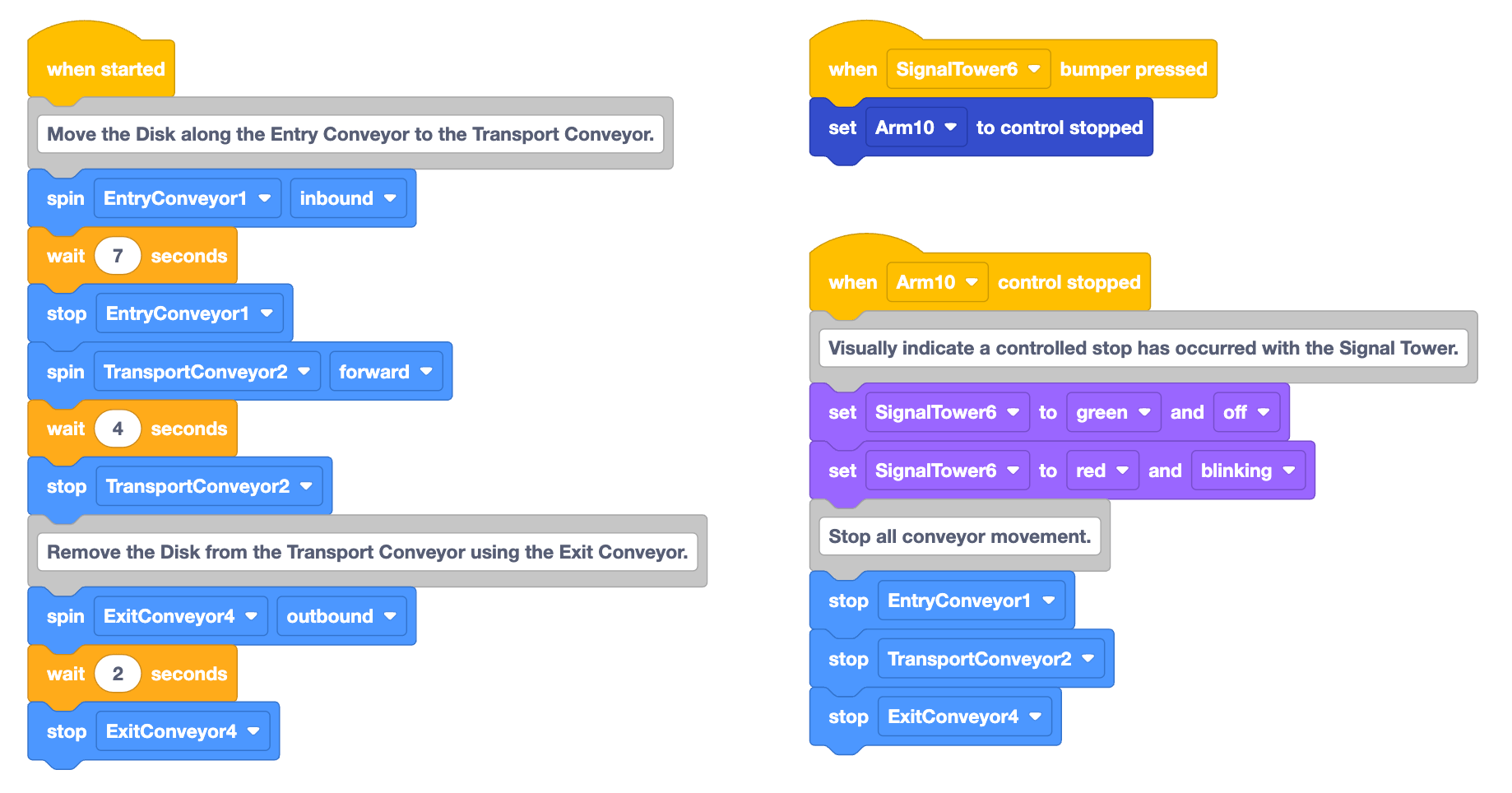
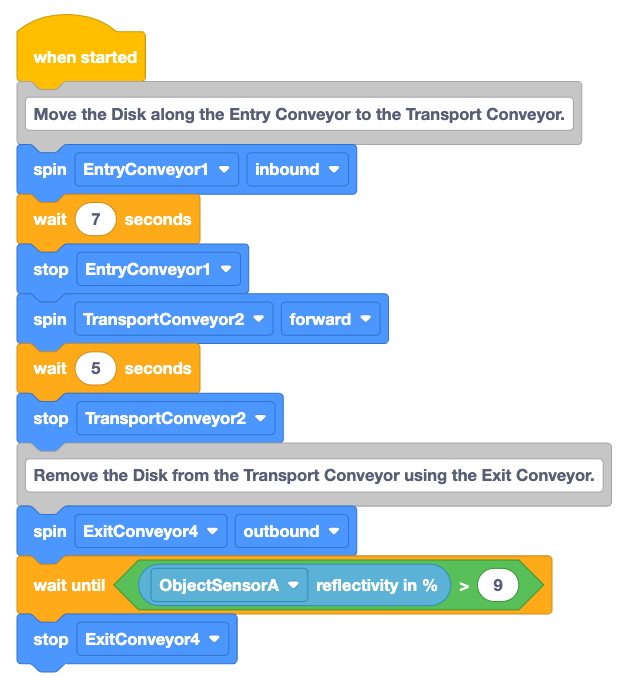
Apri il progettoUnità 4 Lezione 2 Attivitàin VEXcode EXP oppure ricrea il progetto mostrato qui.
Rinomina il progettoUnità 4 Lezione 4.
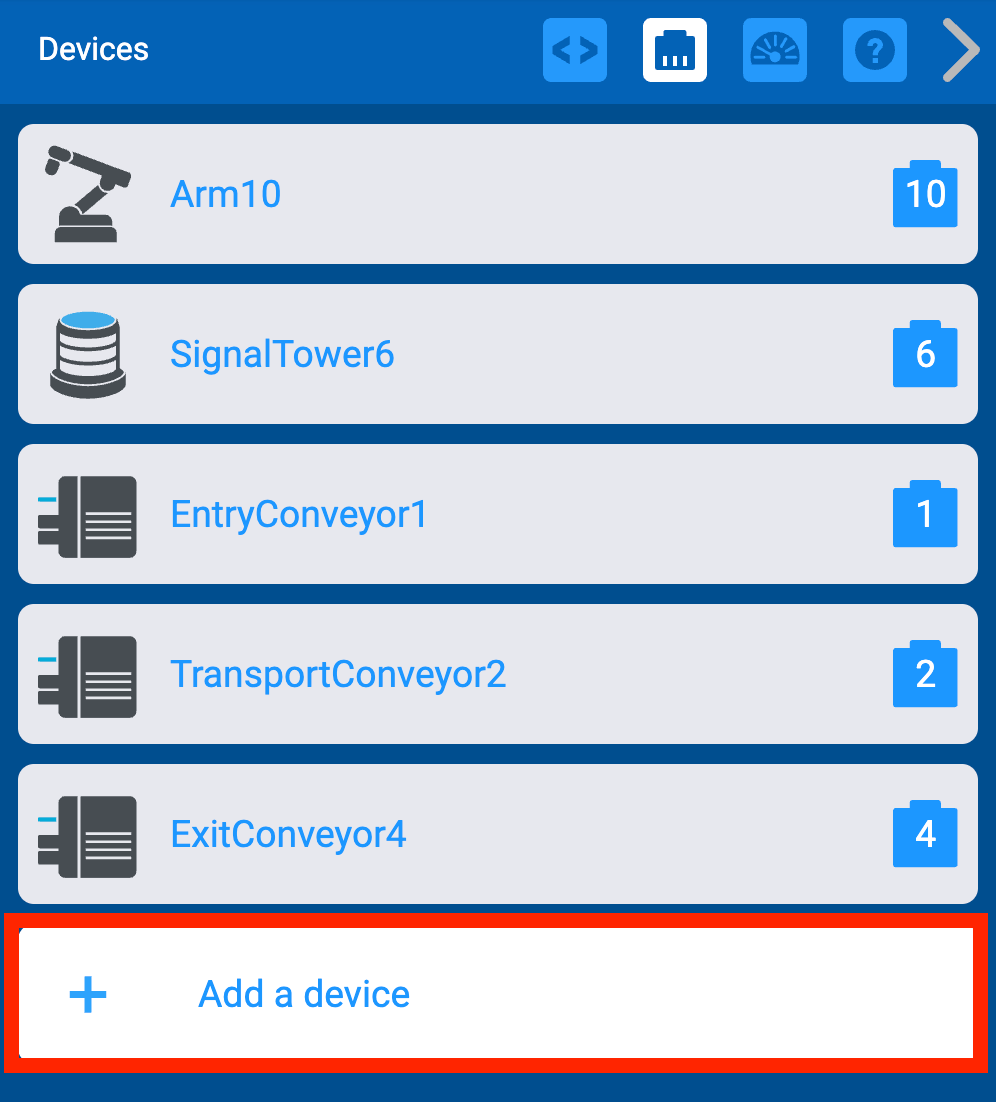
Configurare il sensore di oggetti in VEXcode aprendo la finestra Dispositivi e selezionandoAggiungi un dispositivo.
Selezionare 3-Wireper aprire l'elenco dei dispositivi a 3 fili.
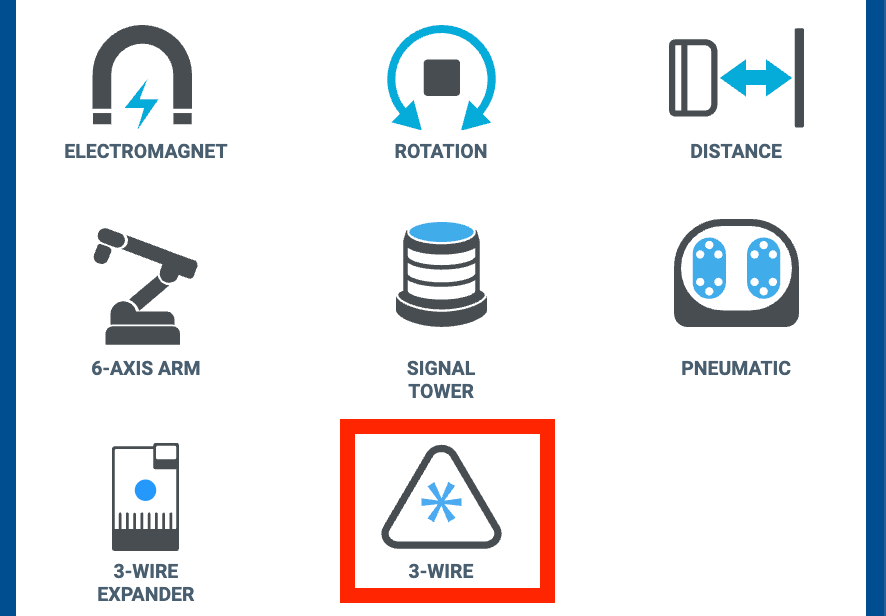
Quindi, selezionare il sensore oggetto
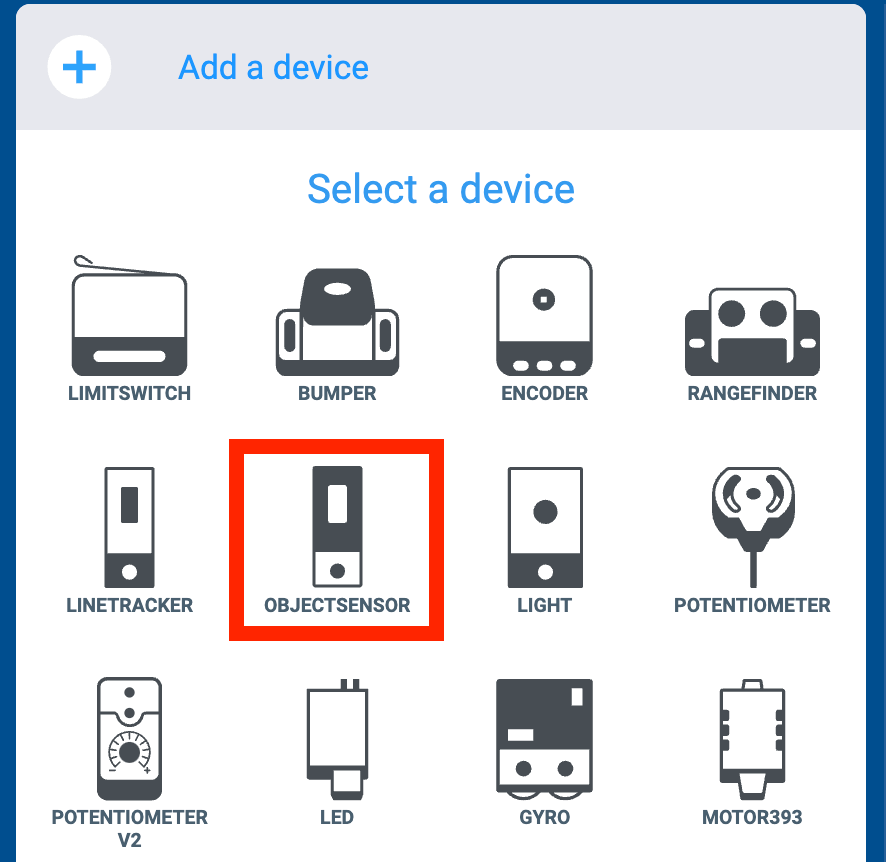
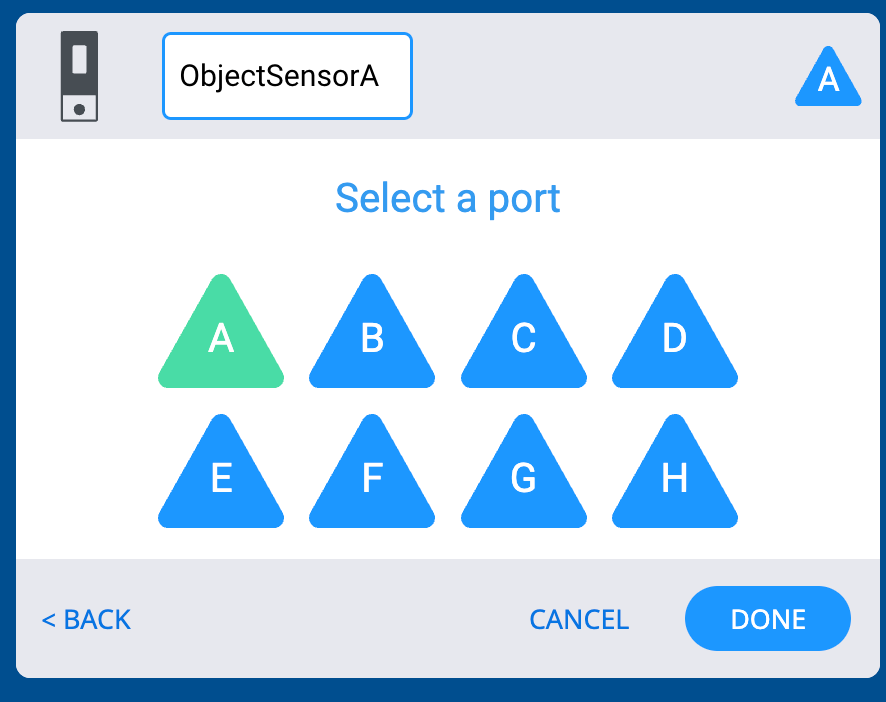
Selezionare la porta A, quindiFattoper completare la configurazione.
Nota:Assicurarsi che il sensore di oggetti sia collegato alla porta A del Brain.
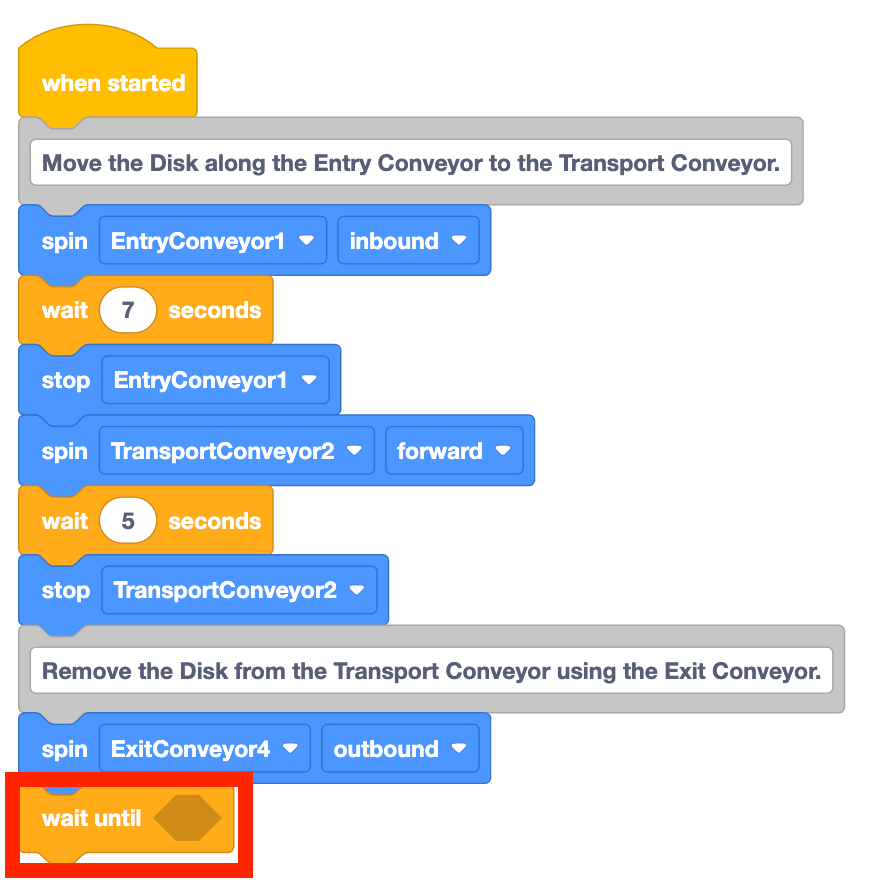
Rimuovere gli ultimi due blocchi dal progetto. Ciò include il bloccoWaite il bloccoStopper il trasportatore di uscita, come mostrato in questo video.
Aggiungere un bloccoAttendi fino aal progetto.
Il bloccoWait untilè un blocco che attende che una condizione booleana venga segnalata come vera prima di passare al blocco successivo nello stack.
Operatori di confronto
Ora che il bloccoWait untilè stato aggiunto al progetto, è necessario aggiungere la condizione che il blocco deve controllare.
In precedenza hai appreso la percentuale di riflettività segnalata dal sensore di oggetti e hai annotato tali valori nel tuo quaderno di progettazione. In questo progetto, è necessario che il trasportatore di uscita funzioniafinché il valore non supera una certa soglia . Una soglia è un parametro utilizzato per determinare se un valore è al di sopra, al di sotto o all'interno di un intervallo accettabile. Gli operatori di confronto possono essere utilizzati per verificare se la riflettività è superiore a un certo valore o a una determinata soglia.
Aggiungere un blocco Maggiore diallo spazio esagonale del bloccoAttendi fino a.
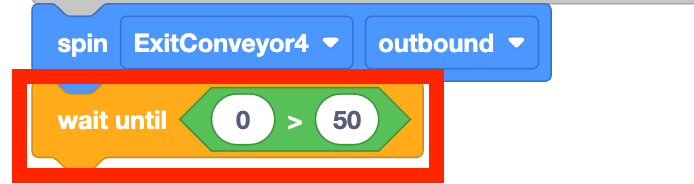
Aggiungere un blocco Riflettività nella prima apertura del blocco Maggiore di.
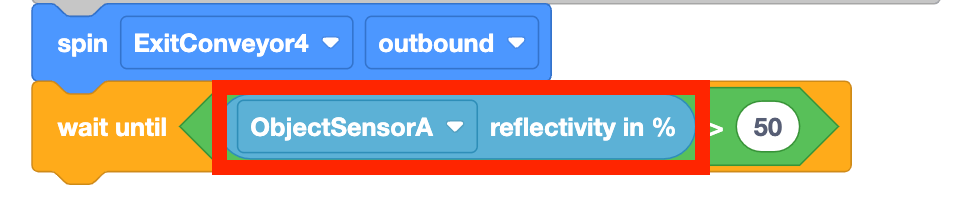
Il bloccoMaggiore diconfronta il primo valore con il secondo. Il blocco Maggiore diattualmente presente nel progetto confronta la percentuale di riflettività riportata dal sensore dell'oggetto con il parametro '50' prima di dichiarare il valore booleano comeVerooFalso.

Rifletti sugli obiettivi di questo progetto. Il trasportatore di uscita deve girare finché il sensore di oggetti non rileva un oggetto, dopodiché il trasportatore deve fermarsi. I valori raccolti nella lezione precedente possono essere utilizzati con questo bloccoMaggiore diper determinare la soglia che deve essere superata prima che il progetto passi al blocco successivo nello stack.
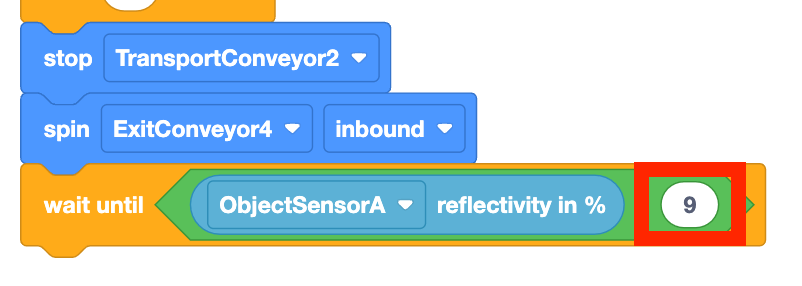
Cambia il secondo parametro del bloccoMaggiore diin '9.'
Questo numero si basa sui valori raccolti nell'attività della lezione precedente. La riflettività è stata segnalata al 10% quando il disco verde si trovava sotto il sensore dell'oggetto, quindi qualsiasi valore pari a maggiore di% dovrebbe essere segnalato comeVero.
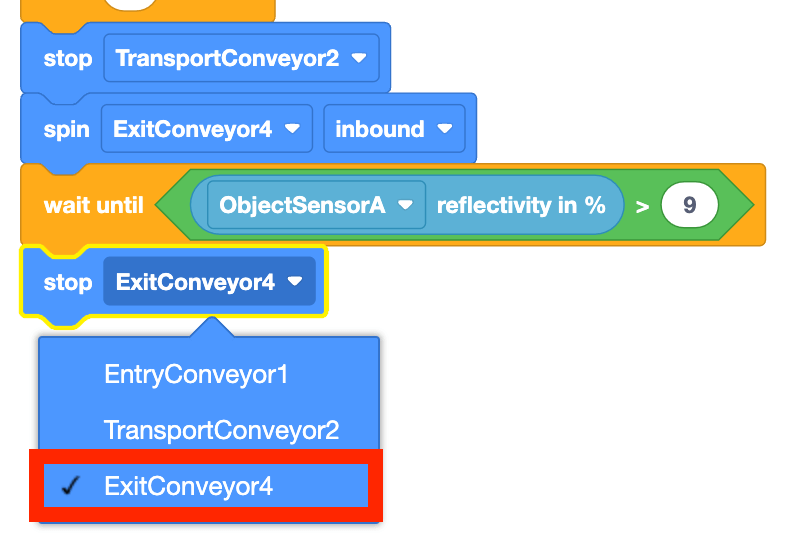
Aggiungere un bloccoStopalla fine del progetto. Assicurarsi che il parametro sia impostato su 'ExitConveyor4'.
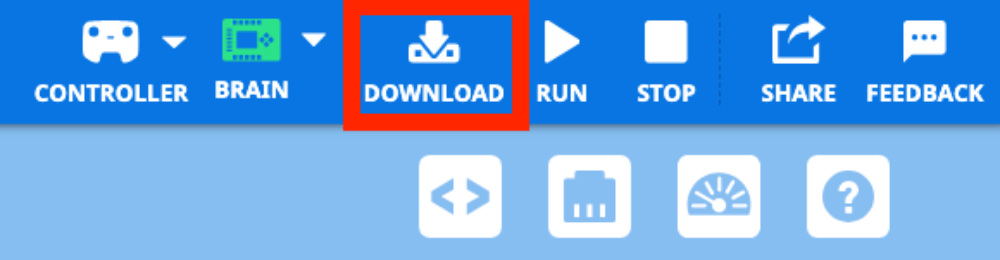
Assicuratevi che Brain sia connesso a VEXcode e scaricate il progetto.
Leggi il codice e prevedi cosa faranno i trasportatori quando il progetto sarà eseguito.
Annota la tua previsione nel tuo quaderno di progettazione.
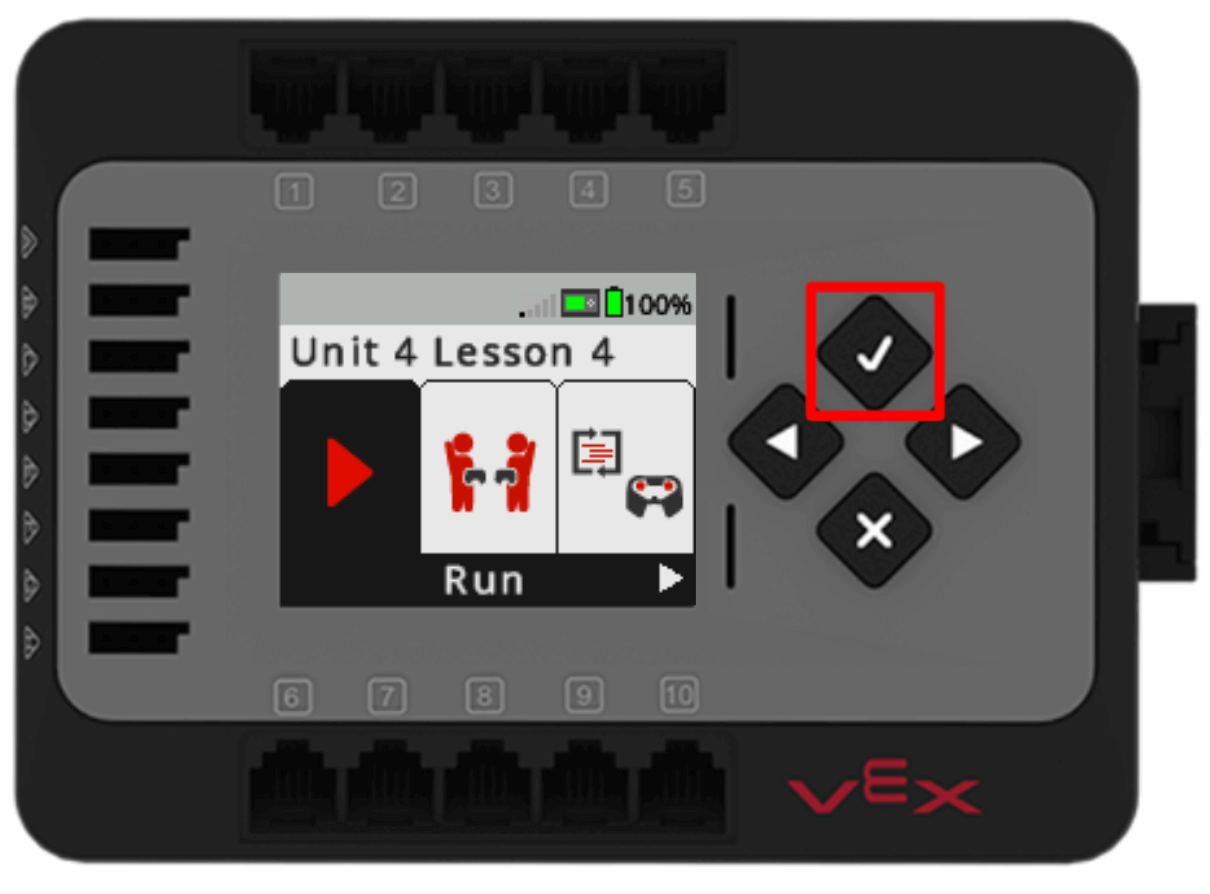
Assicurarsi che sul trasportatore di ingresso sia posizionato un disco verde. Premi il pulsante Check sul Brain per eseguire il progetto e testarlo.
Osservare il comportamento dei trasportatori durante l'esecuzione del progetto.
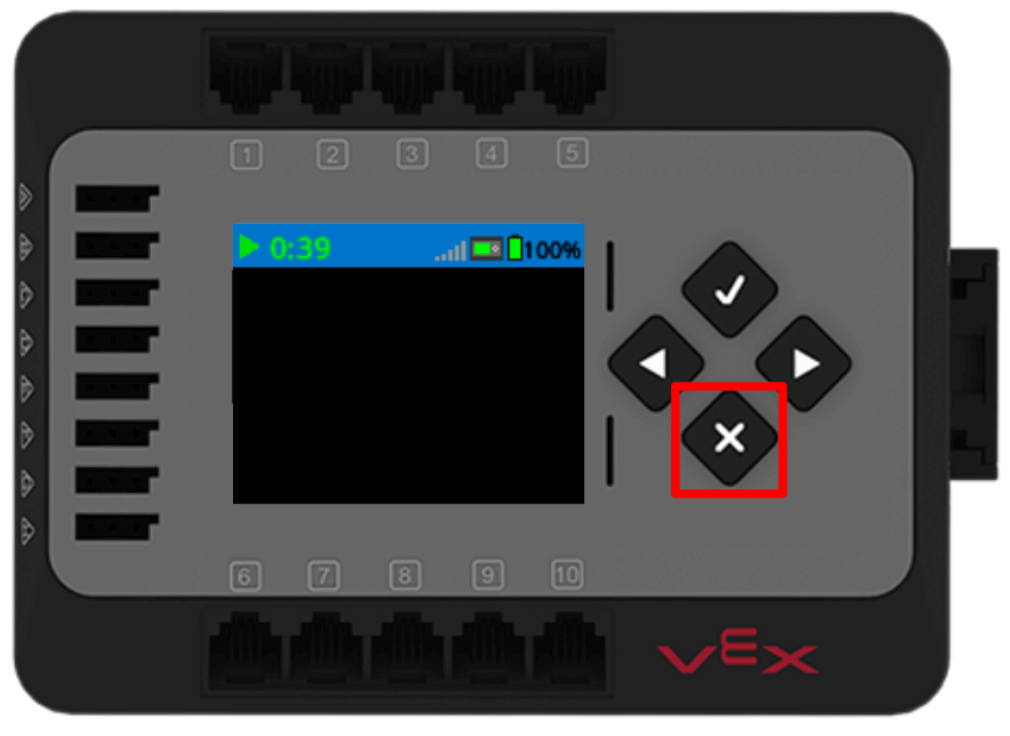
Premere il pulsante X sul Brain per interrompere il progetto quando i nastri trasportatori hanno terminato il movimento. Annota le tue osservazioni sul tuo quaderno di progettazione.
I nastri trasportatori si sono mossi come previsto? Il disco verde è stato spostato sul nastro trasportatore di uscita come previsto? Perché sì o perché no?
Revisione del progetto
Esaminiamo il flusso del progetto in questo progetto che ha arrestato il trasportatore di uscita quando il disco verde è stato rilevato dal sensore di oggetti. Il bloccoAttendi fino aha messo in pausa l'avanzamento del progetto finché la condizione al suo interno non è stata segnalata come TRUE.
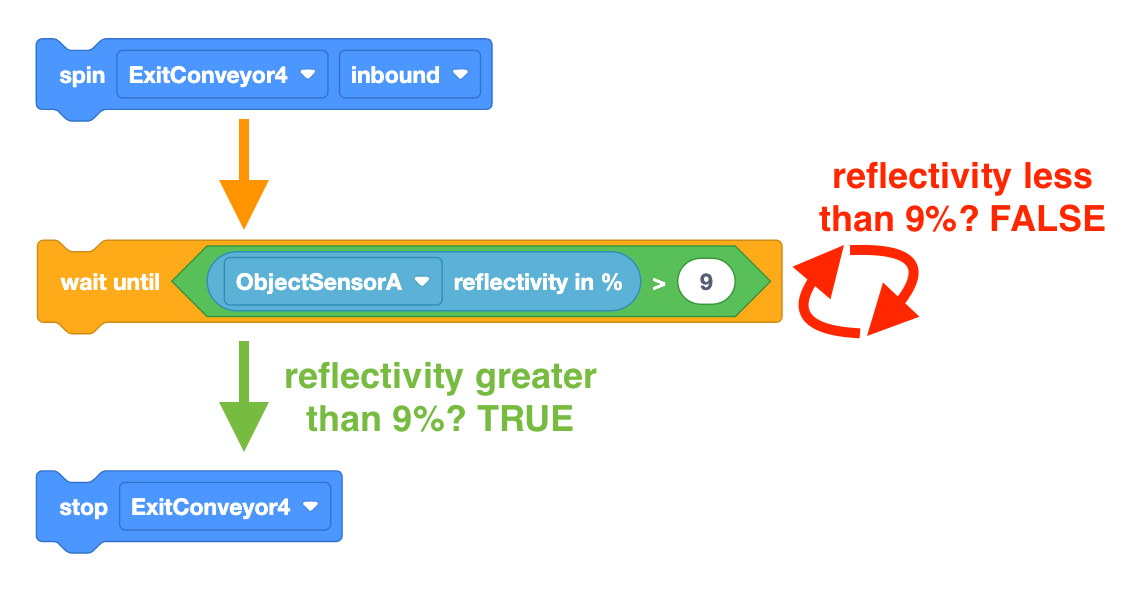
Poiché il bloccoSpinè un blocco non in attesa, consente alla CTE Workcell di continuare a far girare il motore del trasportatore mentre controlla i valori provenienti dal sensore oggetto e la condizione di riflettività superiore al 9%. Dopo che la condizione nel bloccoAttendi fino aviene segnalata comeVERO, il progetto passa al blocco successivo nella pila, arrestando il motore del trasportatore di uscita.
Per vostra informazione
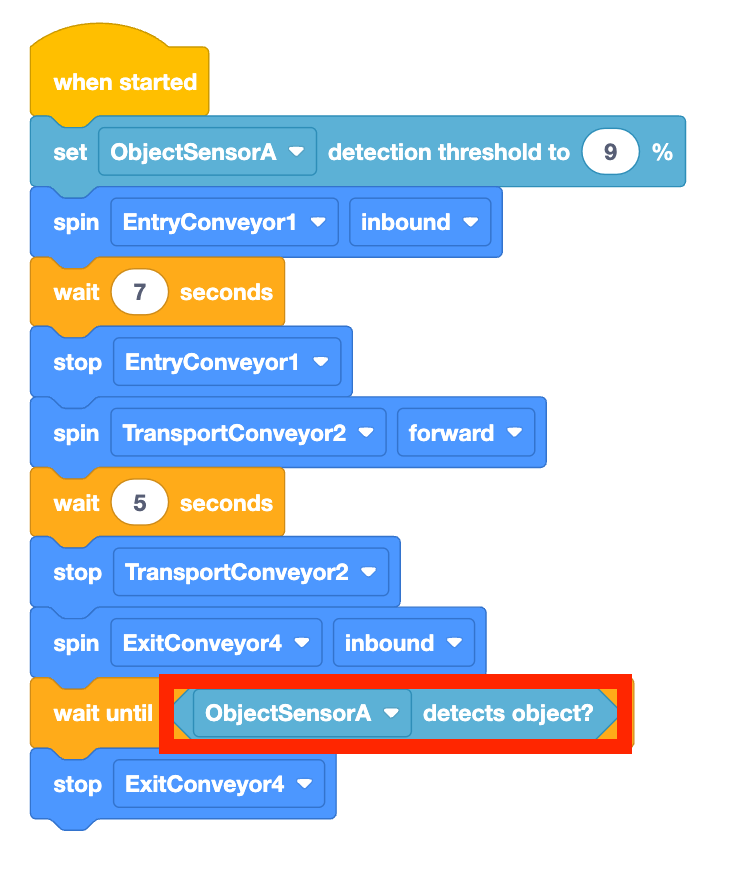
Un'altra combinazione di blocchi può essere utilizzata in un progetto per arrestare il trasportatore di uscita quando un oggetto si trova sotto il sensore oggetto. Il bloccoImposta soglia di rilevamentopuò essere utilizzato all'inizio di un progetto per impostare la soglia, proprio come è stato fatto con il bloccoMaggiore dinel progetto creato sopra.

Una volta impostata la soglia, il blocco BooleanoRileva oggettopuò essere utilizzato in tutti i blocchi con spazi esagonali. Questo blocco riporterà TRUE quando viene raggiunta la soglia di rilevamento definita dal bloccoImposta soglia di rilevamento, oppure FALSE quando la percentuale di riflettività è inferiore a tale soglia.

Poiché il bloccoRilevaoggettoè un blocco booleano, può essere inserito direttamente nel bloccoAttendi fino a.
Controlla la tua comprensione
Prima di passare alla lezione successiva, assicurati di aver compreso i concetti di questa lezione rispondendo alle seguenti domande sul tuo quaderno di progettazione.
Controlla le tue domande di comprensione > (Google Doc / .docx / .pdf )
Seleziona Avanti > per passare all'attività "Mettere tutto insieme".