
Ders 4: Nesne Sensörünün Kodlanması
Geçtiğimiz derste Nesne Sensörü'nü öğrenmiş ve Disk ve Küplerin yansıtma yüzdelerini toplamıştınız. Şimdi, bu değerleri VEXcode'da bir proje oluşturmak için kullanacaksınız ve bu proje, Nesne Sensörü tarafından bir Disk algılandığında Çıkış Konveyörünü durduracaktır.
Bu Derste şunları yapacaksınız:
- VEXcode'da Nesne Sensörünü yapılandırın.
- VEXcode'da karşılaştırma operatörlerinin nasıl kullanılacağını öğrenin.
- Nesne Sensöründen gelen geri bildirimi kullanarak Giriş Konveyöründen Çıkış Konveyörüne bir Diski taşımak için bir proje oluşturun.
Bu Dersin sonunda, Disk Nesne Sensörü tarafından algılandığında Çıkış Konveyörünü durdurmak için önceki Dersteki projenizi geliştirmiş olacaksınız.

Projeyi Düzenleme
Nesne Sensörü ile ilgili komutları eklemeye hazırlanmak için öncelikle 4. Ünite 2. Ders Etkinliğinden projenizi düzenleyerek başlayacaksınız.
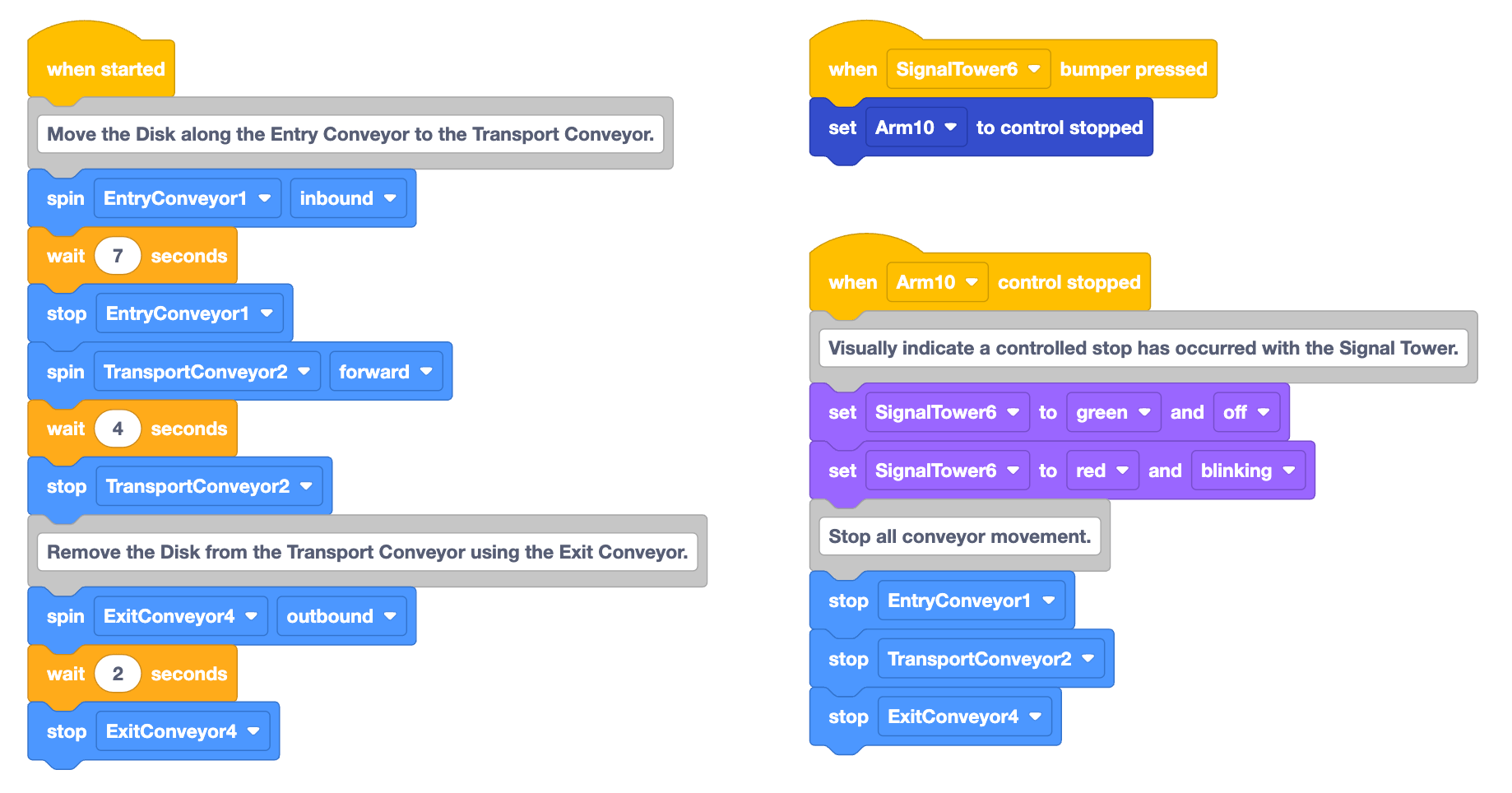
Ünite 4 Ders 2 Etkinlikprojenizi VEXcode EXP'de açın veya burada gösterilen projeyi yeniden oluşturun.
Projenin adını değiştirÜnite 4 Ders
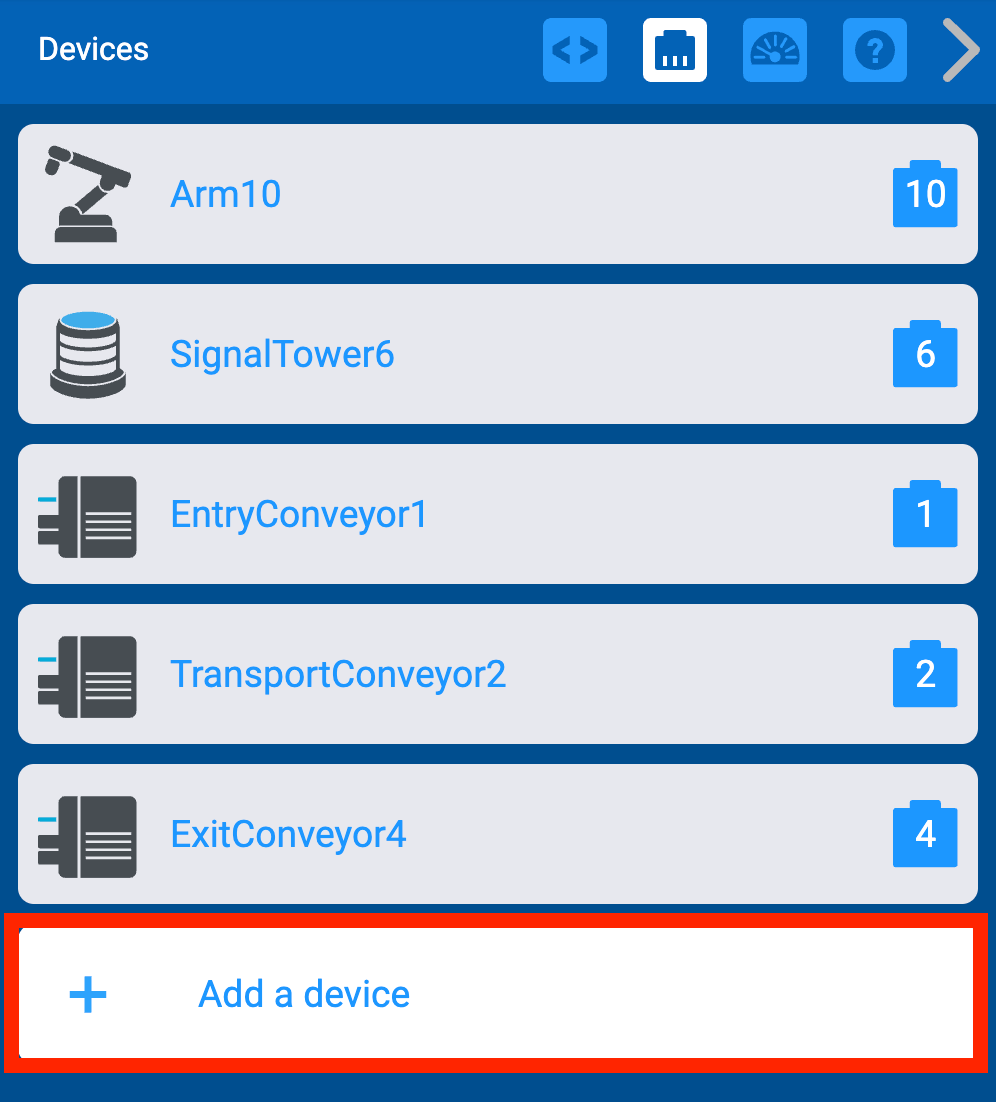
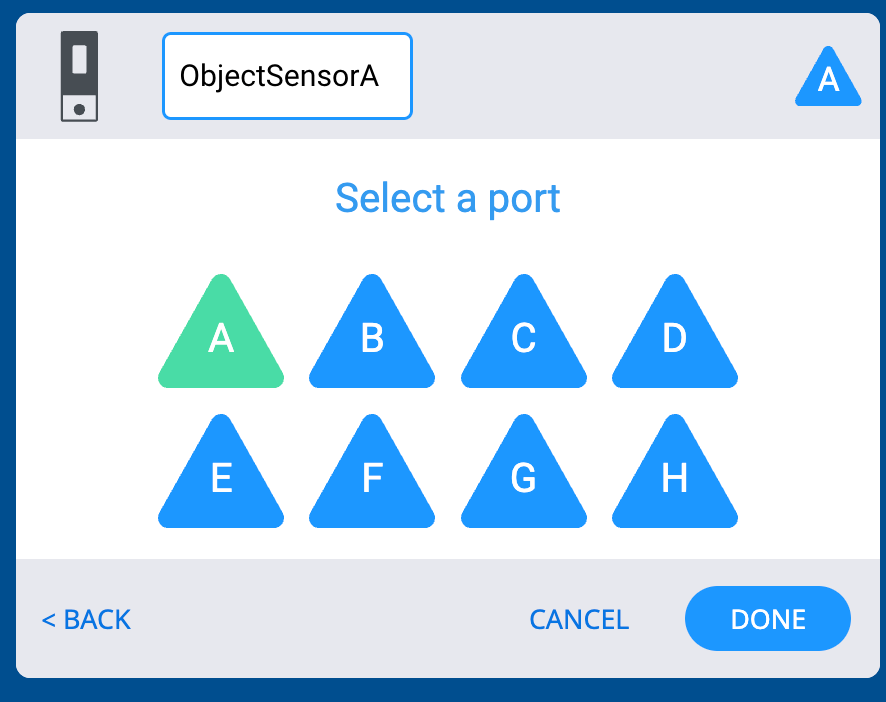
VEXcode'da Nesne Sensörünü yapılandırmak için Aygıtlar Penceresini açın veAygıt Ekle'yi seçin.
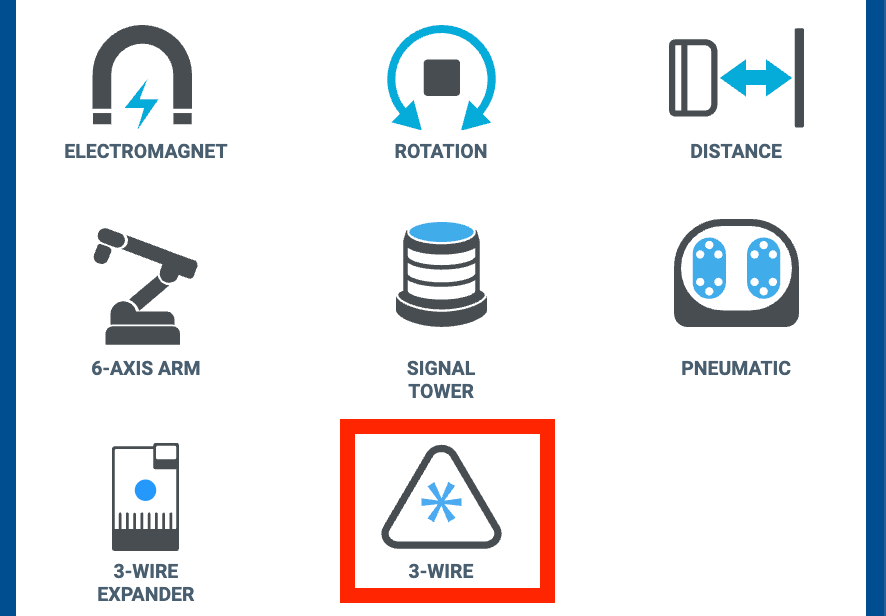
3 kablolu cihazların listesini açmak için 3-Kabloluseçin.
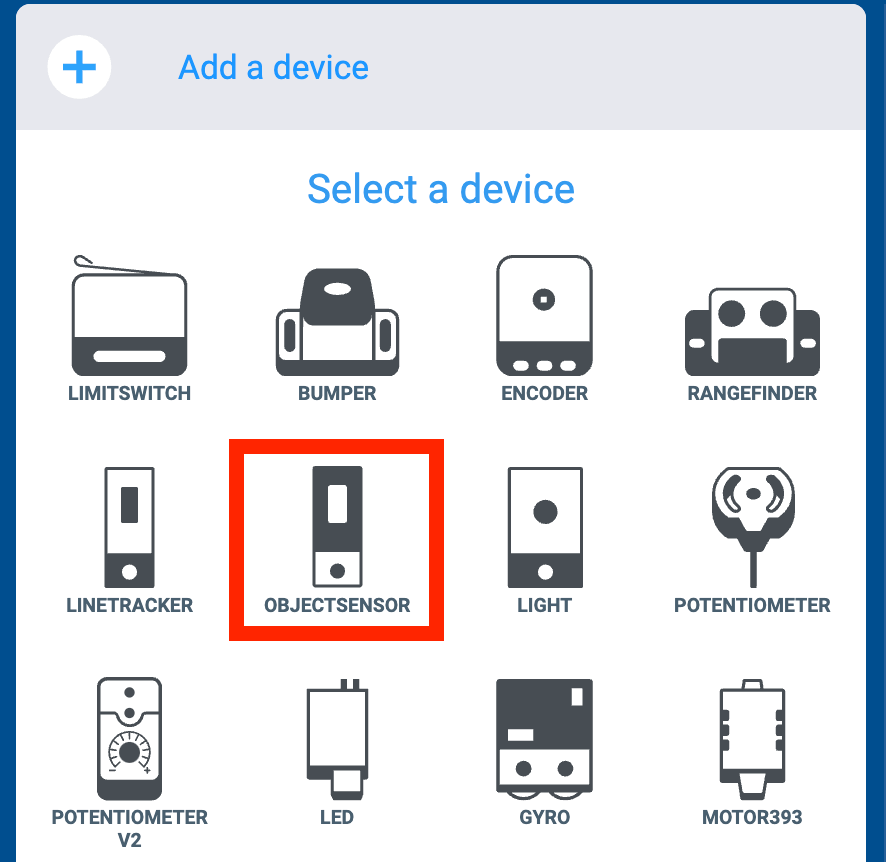
ArdındanNesne Sensörünü seçin.
Yapılandırmayı tamamlamak için Aportunu seçin, ardındanDone.
Not:Nesne Sensörünün Beyindeki A portuna takılı olduğundan emin olun.
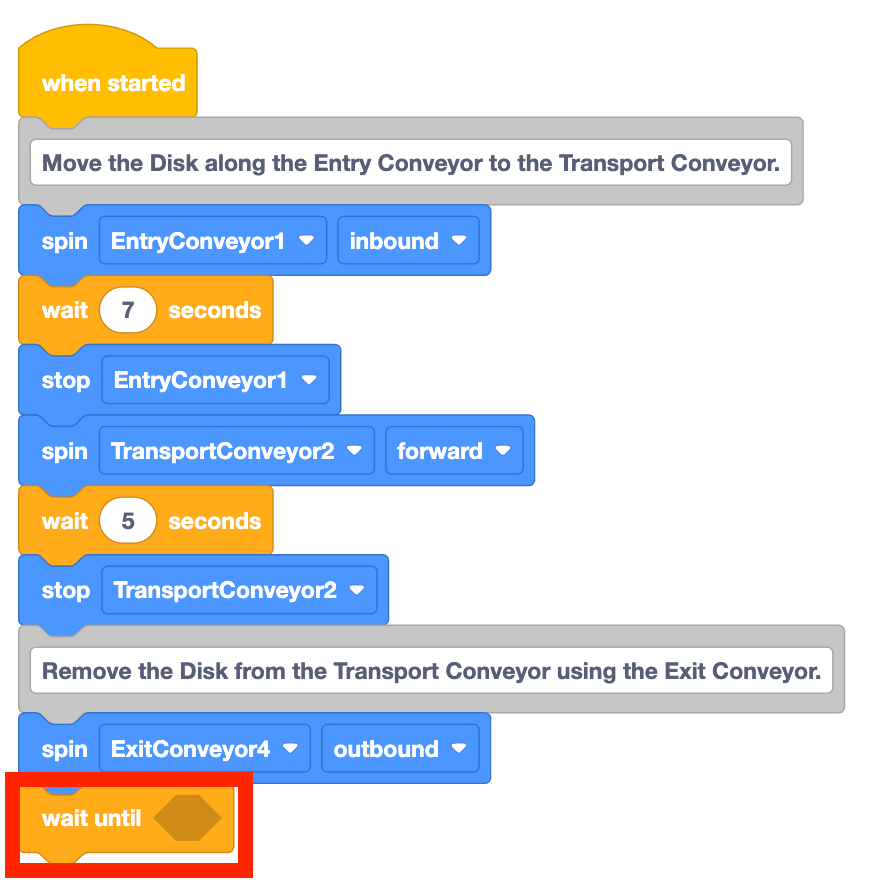
Projedeki son iki bloğu kaldırın. Bu, bu videoda gösterildiği gibi Çıkış Konveyörü içinBeklemebloğu veDurmabloğunu içerir.
ekle Projeyeblok kalana kadar bekle.
Wait untilbloğu, yığındaki bir sonraki bloğa geçmeden önce bir Boole koşulunun doğru olarak raporlanmasını bekleyen bir bloktur.
Karşılaştırma Operatörleri
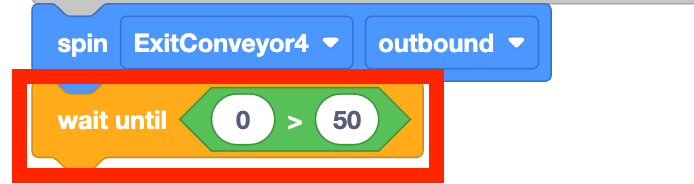
ArtıkWait untilbloğu projeye eklendiğinde, bloğun kontrol edeceği koşulun eklenmesi gerekiyor.
Daha önce Nesne Sensörü tarafından bildirilen yansıtma yüzdesini öğrenmiş ve bu değerleri mühendislik not defterinize kaydetmiştiniz. Bu projede Çıkış Konveyörününkadar belirli bir üstünde çalışmasını sağlamanız gerekiyor. Eşik, bir değerin kabul edilebilir aralığın üstünde, altında veya içinde olup olmadığını belirlemek için kullanılan bir şeydir. Karşılaştırma operatörleri, yansıtma değerinin belirli bir değerin üstünde olup olmadığını veya o eşik değerinin üstünde olup olmadığını kontrol etmek için kullanılabilir.
bloğunun altıgensel boşluğunabüyük bir bloğu ekleyin.bloğuna kadar bekleyin.
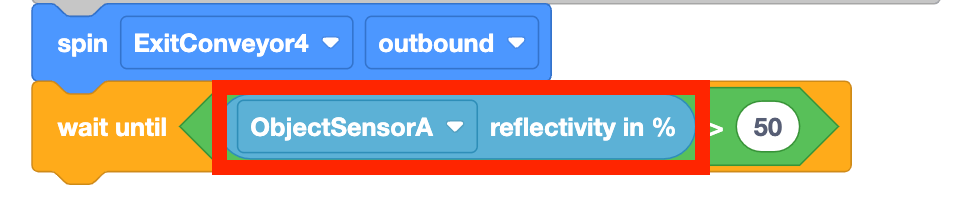
Büyükbloğunun ilk açılışına Yansıtıcılıkbloğunu ekleyin.
Büyükbloğu ilk değeri ikinci değerle karşılaştırır. Projede şu anda bulunan Büyükbloğu, Nesne Sensörü tarafından bildirilen yansıtma yüzdesini, Boole değeriniDoğruveyaYanlışolarak bildirmeden önce '50' parametresiyle karşılaştırıyor.

Bu projenin hedeflerini düşünün. Çıkış Konveyörünün, Nesne Sensörü bir nesne algılayana kadar dönmesi ve ardından konveyörün durması gerekir. Önceki Derste toplanan değerler, projenin yığındaki bir sonraki bloğa geçmeden önce aşılması gereken eşiği belirlemek için buBüyükbloğuyla birlikte kullanılabilir.
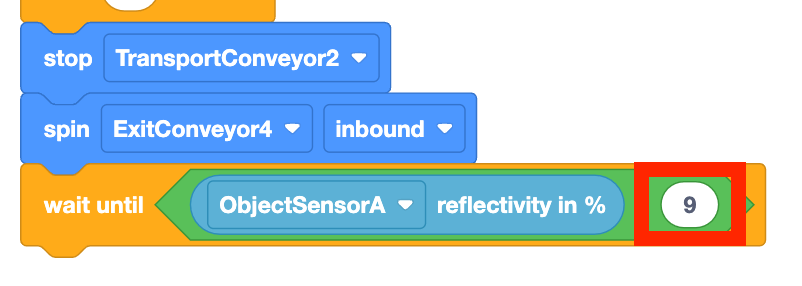
Greater thanbloğunun ikinci parametresini '9' olarak değiştirin.
Bu sayı, bir önceki Ders etkinliğinde toplanan değerlere dayanmaktadır. Yeşil Disk Nesne Sensörünün altındayken yansıtma %10 olarak bildirildi, bu nedenle%'dan büyük herhangi bir Trueolarak bildirilmelidir.
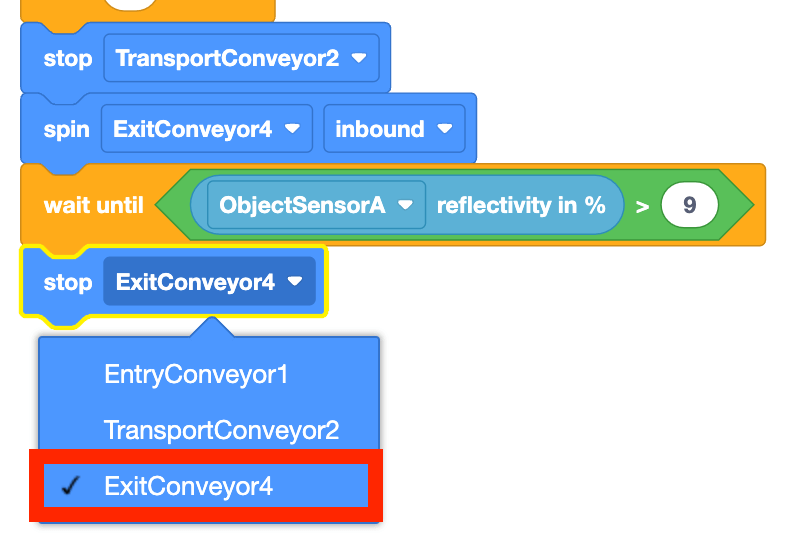
Projenin sonunaStopbloğu ekleyin. Parametrenin 'ExitConveyor4' olarak ayarlandığından emin olun.
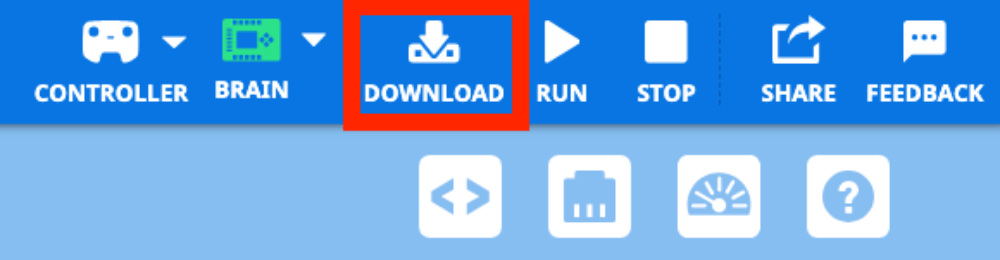
Beyninizin VEXcode'a bağlı olduğundan emin olun ve projeyi indirin.
Kodu okuyun ve proje çalıştırıldığında konveyörlerin ne yapacağını tahmin edin.
Tahmininizi mühendislik not defterinize kaydedin.
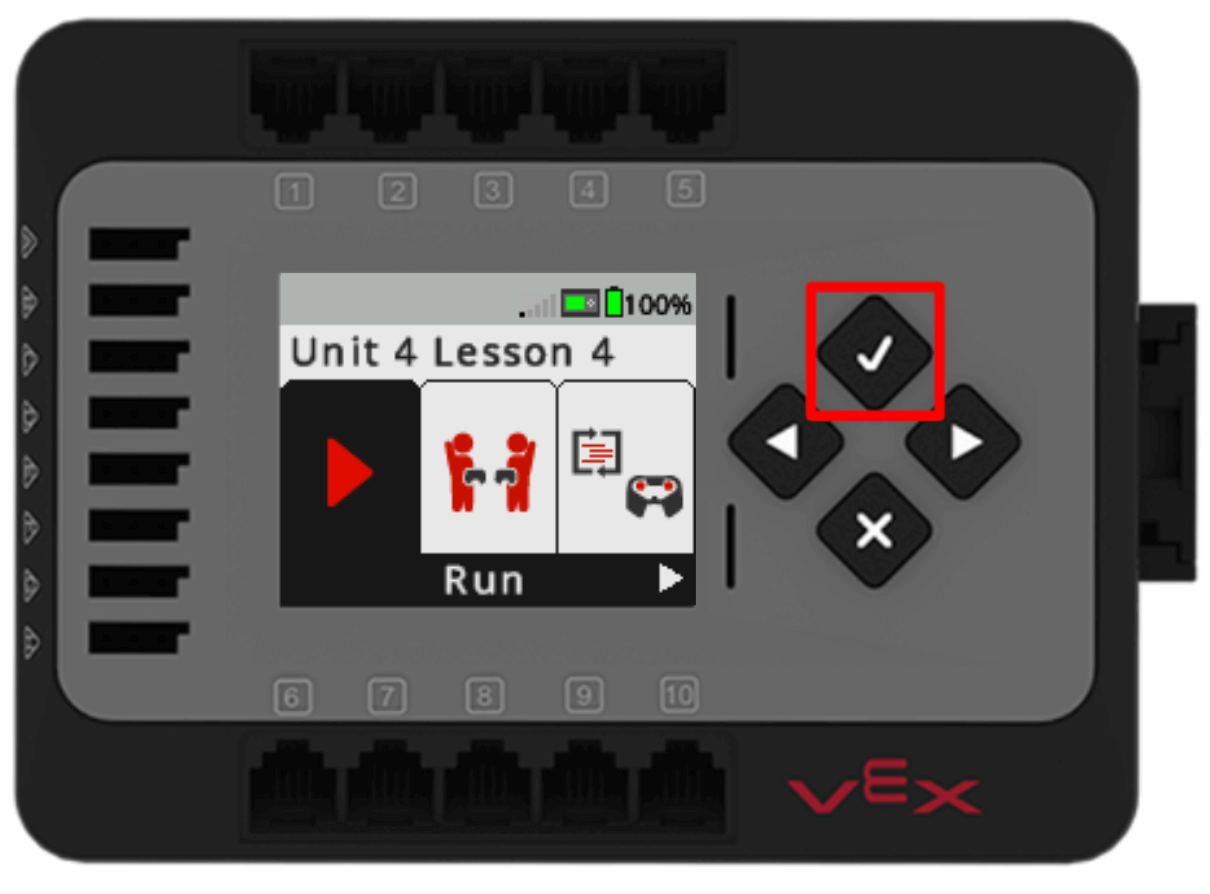
Giriş Konveyörüne yeşil bir Disk yerleştirildiğinden emin olun. Projeyi test etmek için Beyindeki Check butonuna basın.
Proje çalışırken konveyörlerin davranışını gözlemleyin.
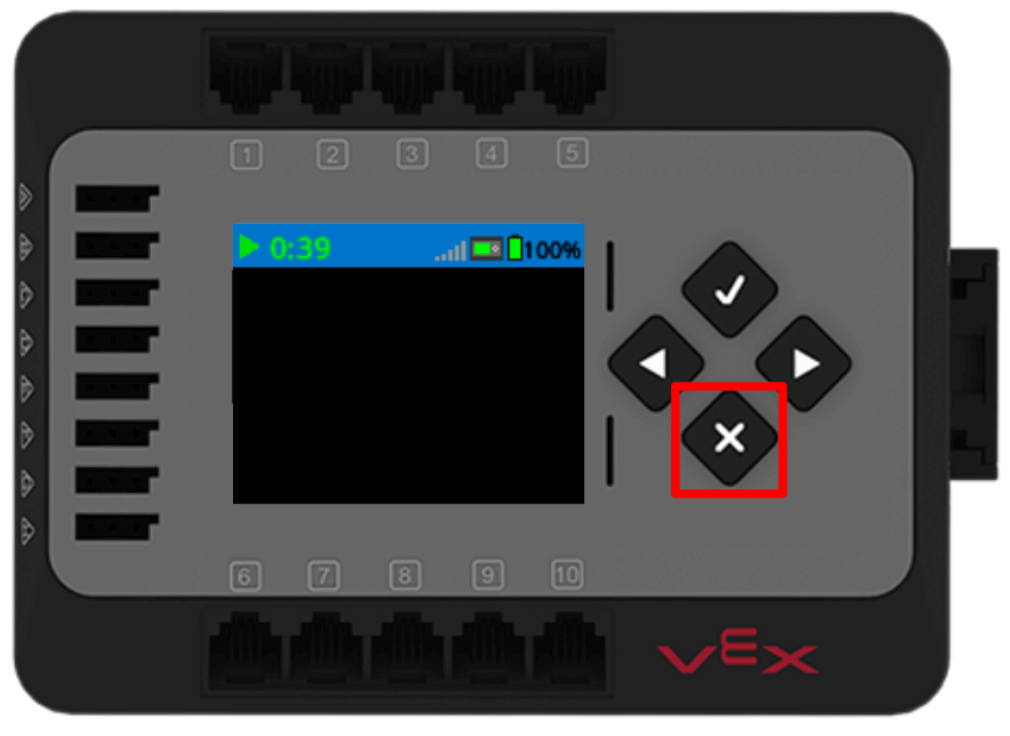
Konveyörler hareket etmeyi bitirdiğinde projeyi durdurmak için Beyindeki X butonuna basın. Gözlemlerinizi mühendislik not defterinize kaydedin.
Konveyörler tahmin ettiğiniz gibi hareket etti mi? Yeşil Disk, tasarlandığı gibi Çıkış Konveyörüne taşındı mı? Neden veya neden olmasın?
Projenin İncelenmesi
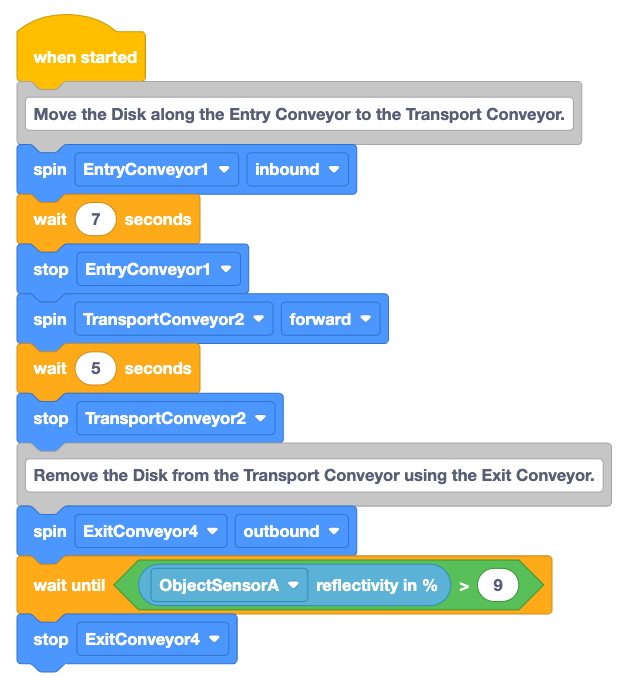
Yeşil Diskin Nesne Sensörü tarafından algılanmasıyla Çıkış Konveyörünün durduğu bu projedeki proje akışını inceleyelim. bloğu projenin ilerlemesini durdurana kadar bekle, ta ki koşul TRUE olarak bildirilene kadar.
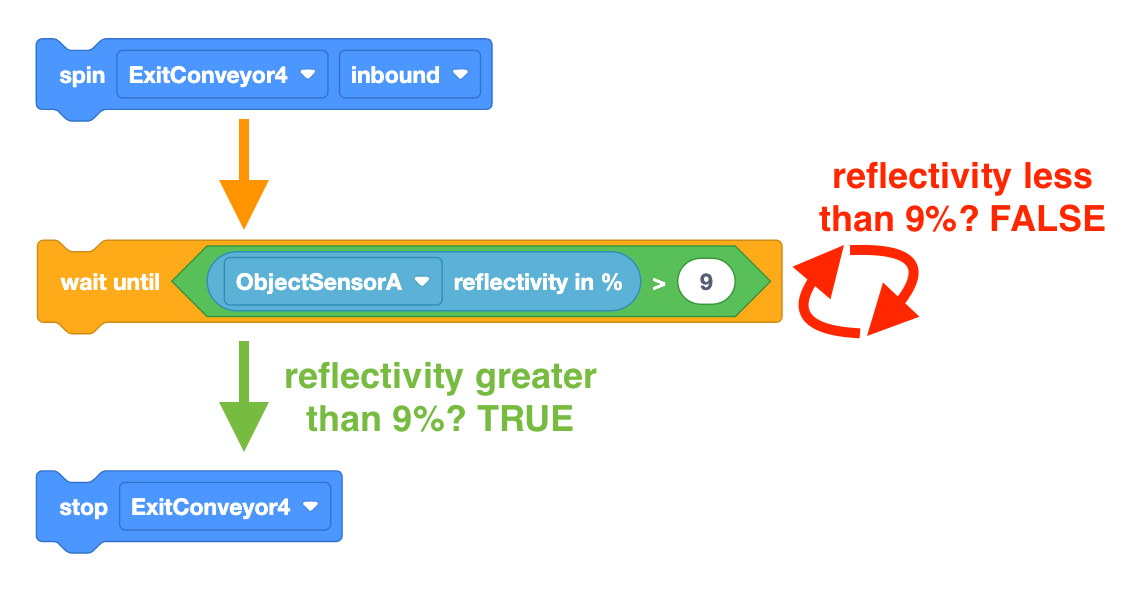
Spinbloğu beklemeyen bir blok olduğundan, CTE Workcell'in Nesne Sensöründen gelen değerleri ve yansıtıcılığın %9'dan büyük olma durumunu kontrol ederken konveyör motorunu döndürmeye devam etmesine olanak tanır. koşul sağlandıktan sonrablokTRUE olarak raporlanıncaya kadar bekle, proje yığındaki bir sonraki bloğa geçer ve Çıkış Konveyör motorunu durdurur.
Bilginize
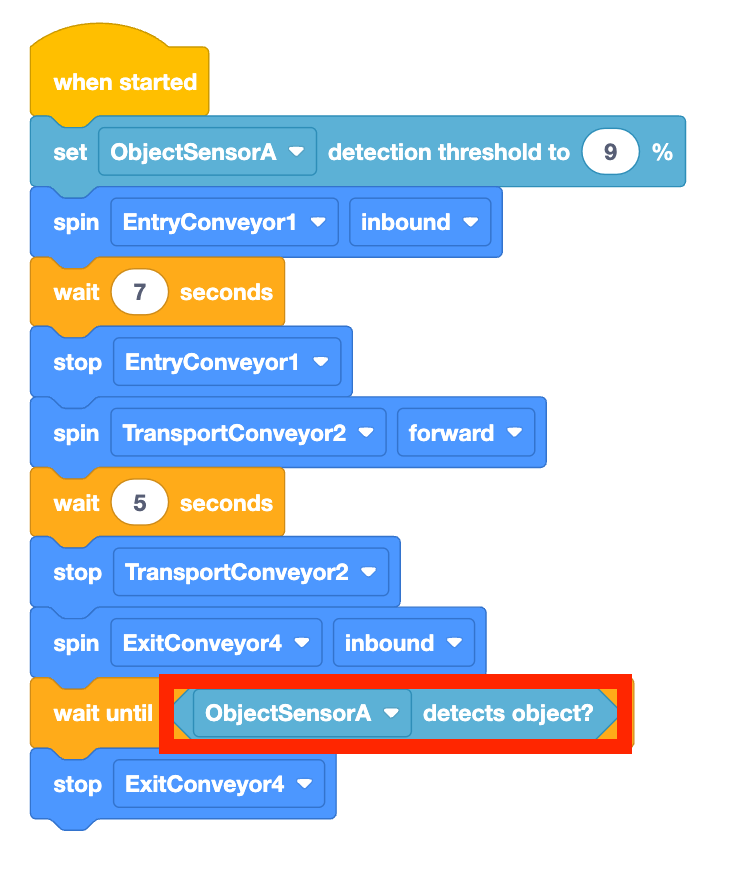
Bir projede, Nesne Sensörünün altında bir nesne olduğunda Çıkış Konveyörünü durdurmak için başka bir blok kombinasyonu kullanılabilir. Set Detection Thresholdbloğu, yukarıda oluşturulan projedeGreater thanbloğunun yaptığı gibi, bir projenin başlangıcında eşiği ayarlamak için kullanılabilir.

Eşik değeri ayarlandıktan sonra, BooleanDetects objectbloğu altıgen boşluklu herhangi bir blokta kullanılabilir. Bu blok,Algılama eşiğini ayarlabloğu tarafından tanımlanan algılama eşiğine ulaşıldığında TRUE değerini, yansıtma yüzdesi bu eşiğin altında olduğunda FALSE değerini bildirecektir.

Detectsobjectbloğu bir Boolean bloğu olduğundan, doğrudanWait untilbloğuna sığabilir.
Anlayışınızı Kontrol Edin
Bir sonraki derse geçmeden önce, mühendislik defterinize aşağıdaki soruları cevaplayarak bu dersteki kavramları anladığınızdan emin olun.
Anladığınızı Kontrol Edin soruları > (Google Dokümanı / .docx / .pdf)
Tümünü Bir Araya Getirme Etkinliğine geçmek için Sonraki > seçin.