
Bài 4: Mã hóa cảm biến đối tượng
Trong Bài học trước, bạn đã tìm hiểu về Cảm biến đối tượng và thu thập phần trăm phản xạ của Đĩa và Khối lập phương. Bây giờ, bạn sẽ sử dụng các giá trị đó để xây dựng một dự án trong VEXcode nhằm dừng Exit Conveyor khi Cảm biến đối tượng phát hiện thấy Đĩa.
Trong bài học này, bạn sẽ:
- Cấu hình Cảm biến đối tượng trong VEXcode.
- Tìm hiểu cách sử dụng toán tử so sánh trong VEXcode.
- Tạo một dự án để di chuyển Đĩa từ Băng tải vào đến Băng tải ra bằng cách sử dụng phản hồi từ Cảm biến đối tượng.
Đến cuối Bài học này, bạn sẽ xây dựng được dự án từ Bài học trước để dừng Băng tải thoát khi Cảm biến đối tượng phát hiện ra Đĩa.
Chỉnh sửa dự án
Bạn sẽ bắt đầu bằng cách chỉnh sửa dự án của mình từ Hoạt động Bài 2 Đơn vị 4 để chuẩn bị thêm các lệnh liên quan đến Cảm biến đối tượng.
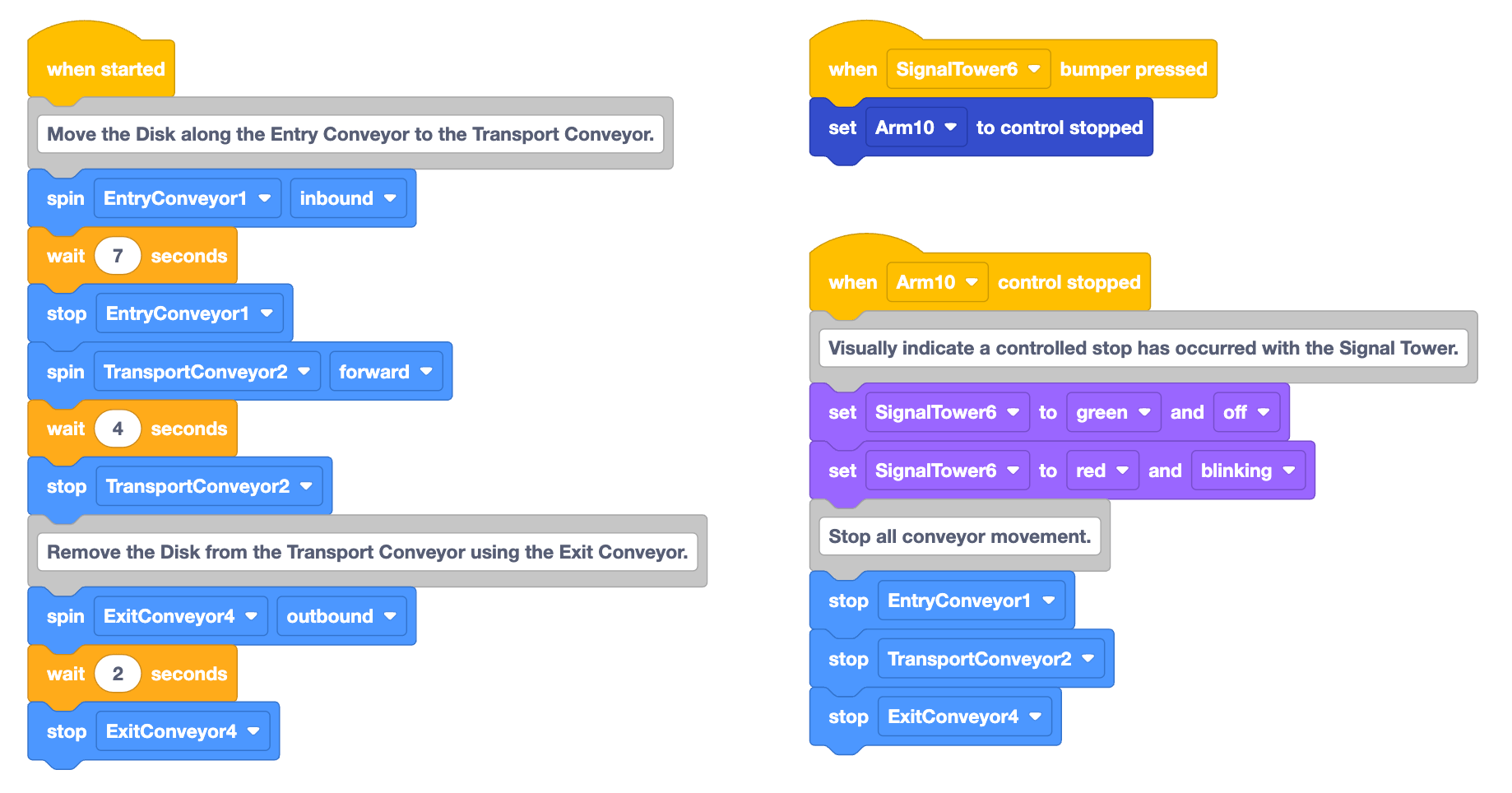
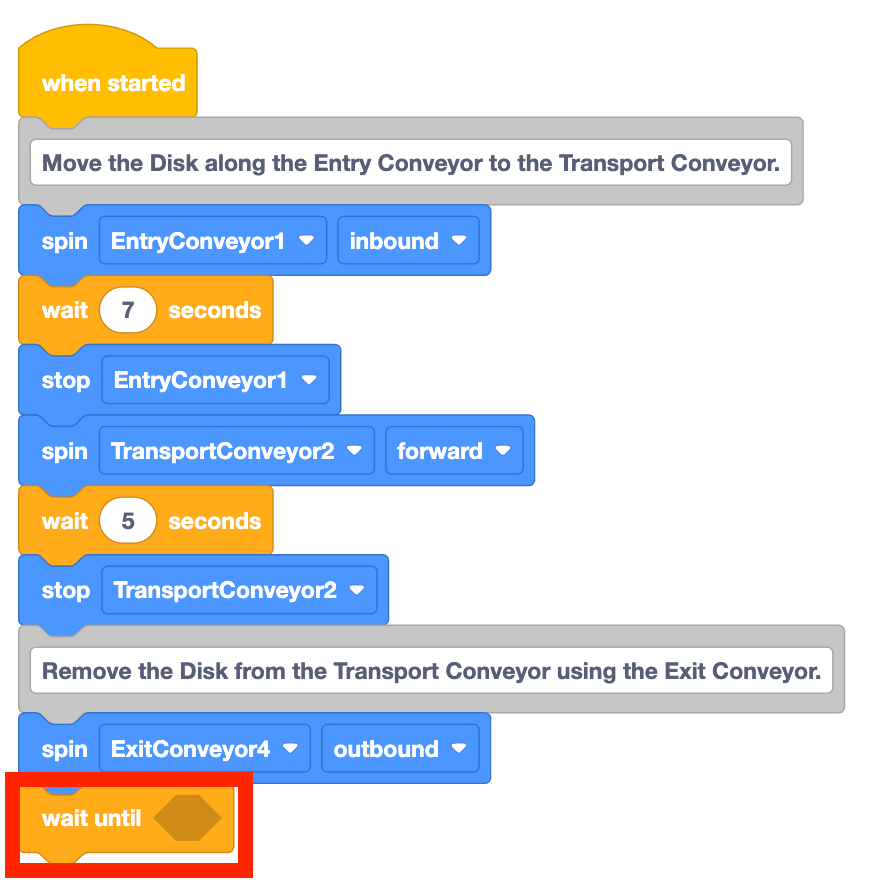
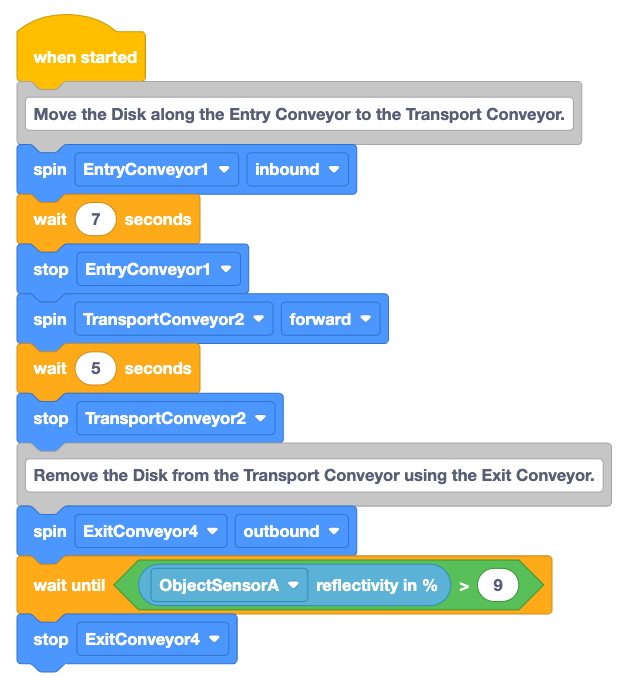
Mở dự ánĐơn vị 4 Bài 2 Hoạt độngtrong VEXcode EXP hoặc tạo lại dự án được hiển thị ở đây.
Đổi tên dự ánĐơn vị 4 Bài 4.
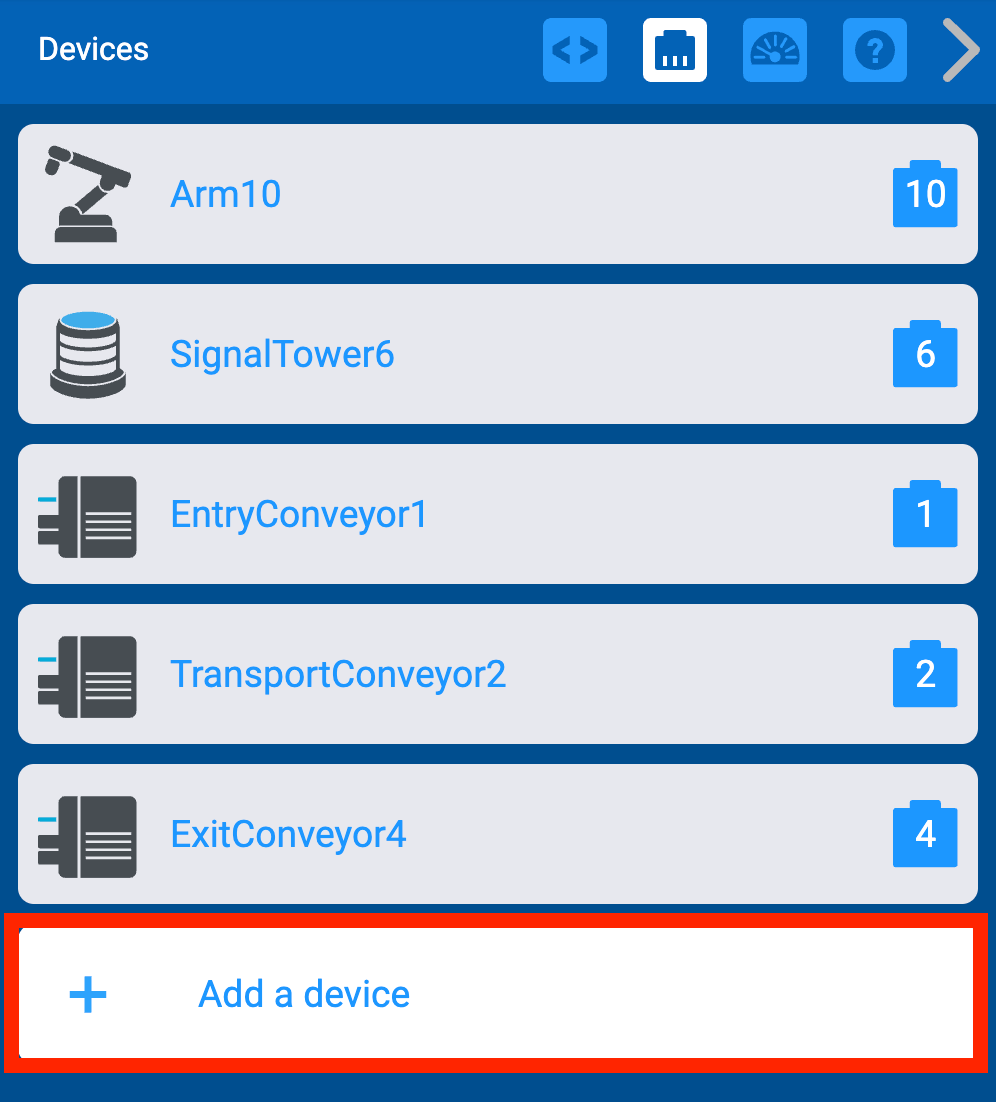
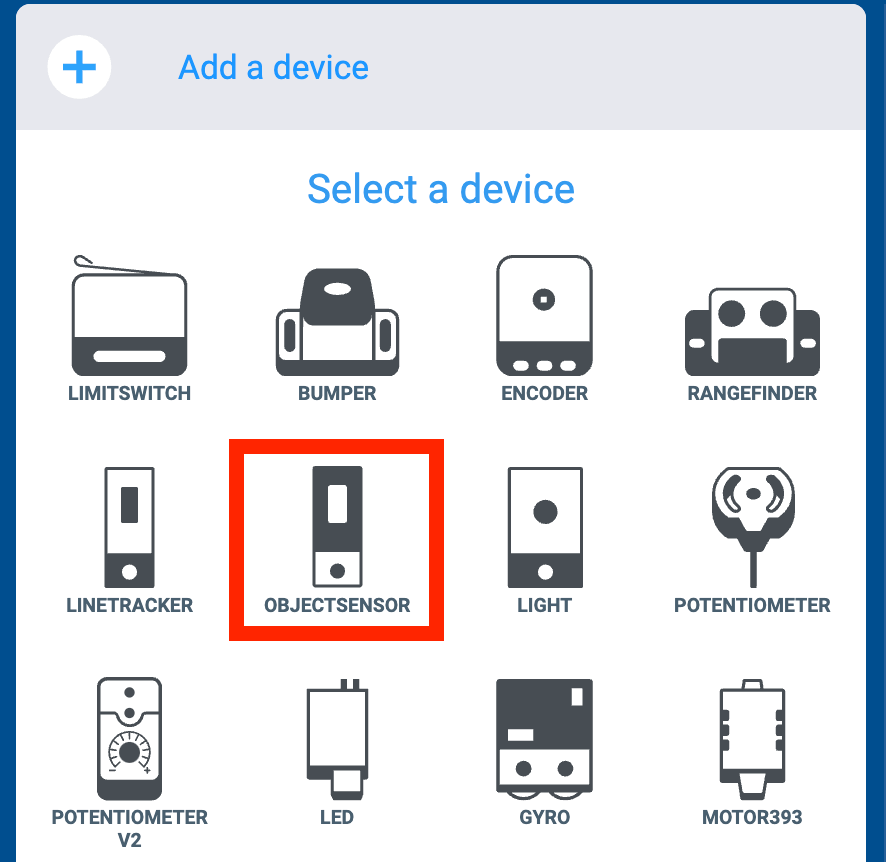
Cấu hình Cảm biến đối tượng trong VEXcode bằng cách mở Cửa sổ Thiết bị và chọnThêm Thiết bị.
Chọn 3-Wiređể mở danh sách các thiết bị 3 dây.
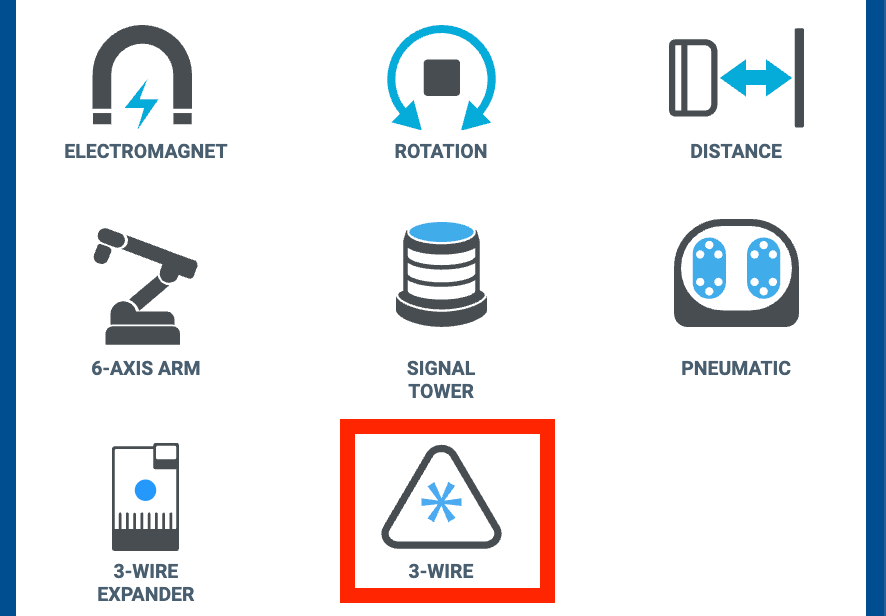
Sau đó, chọn Cảm biến đối tượng
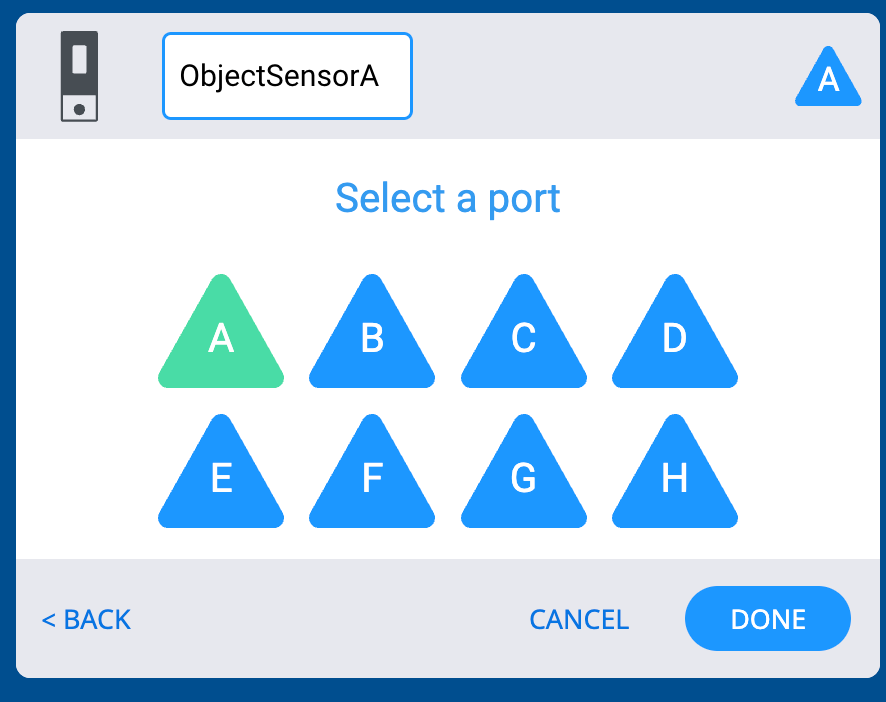
Chọn cổng A, sau đó chọnDoneđể hoàn tất cấu hình.
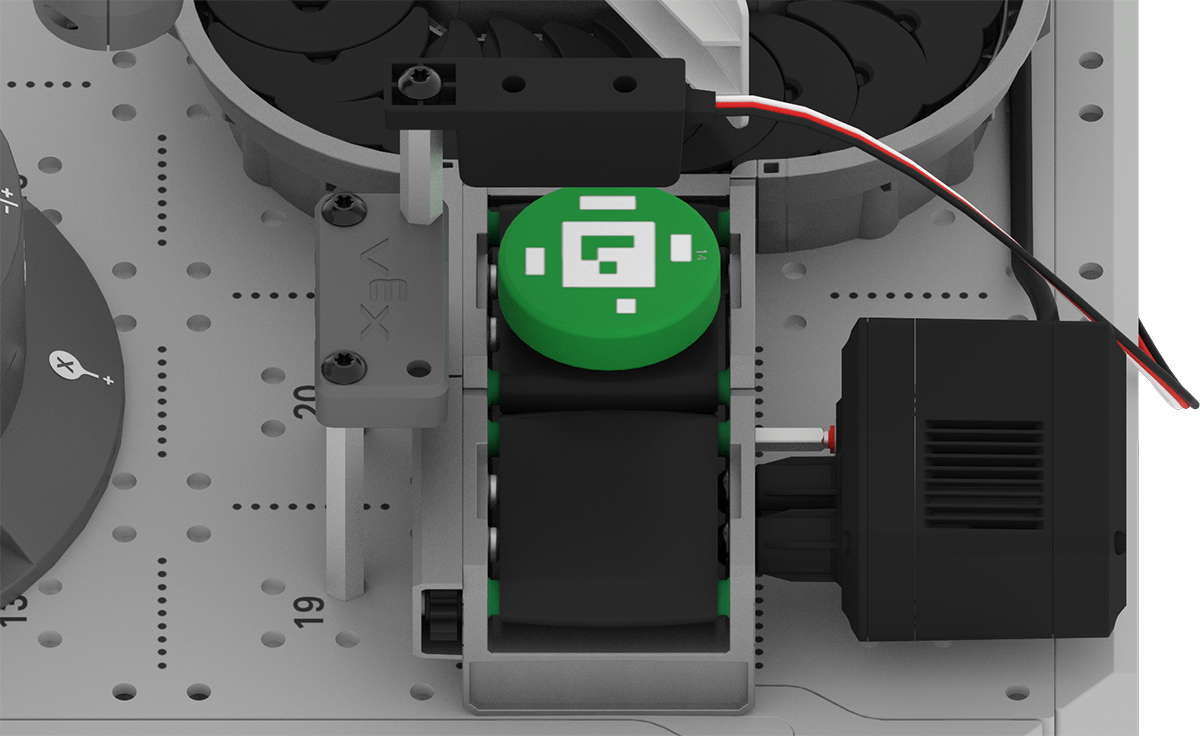
Lưu ý:Đảm bảo Cảm biến đối tượng được cắm vào cổng A trên Não.
Xóa hai khối cuối cùng trong dự án. Bao gồm khốiChờvà khốiDừngcho Băng tải thoát, như được hiển thị trong video này.
Thêm khốiChờ cho đến khikhối vào dự án.
KhốiChờ cho đến khilà khối chờ điều kiện Boolean báo cáo là đúng trước khi chuyển sang khối tiếp theo trong ngăn xếp.
Toán tử so sánh
Bây giờ khốiChờ cho đến khiđược thêm vào dự án, điều kiện cần được khối kiểm tra cần được thêm vào.
Trước đó, bạn đã tìm hiểu về tỷ lệ phản xạ được Cảm biến đối tượng báo cáo và ghi lại những giá trị đó vào sổ tay kỹ thuật của mình. Trong dự án này, bạn cần Exit Conveyor chạy từđến, giá trị đó phải cao hơn một ngưỡng nhất định . Ngưỡng là thứ dùng để xác định xem giá trị có nằm trên, dưới hay trong phạm vi chấp nhận được hay không. Có thể sử dụng toán tử so sánh để kiểm tra xem độ phản xạ có vượt quá một giá trị nhất định hay vượt quá ngưỡng đó hay không.
Thêm một khối lớn hơnvào không gian lục giác của khốiChờ cho đến khi khối.
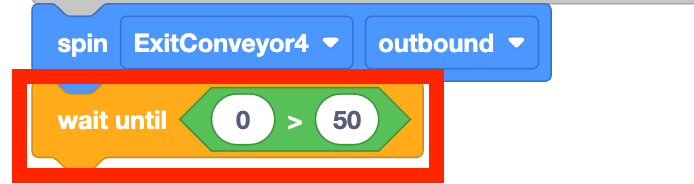
Thêm khối Phản xạ vào lần mở đầu tiên của khối Lớn hơn.
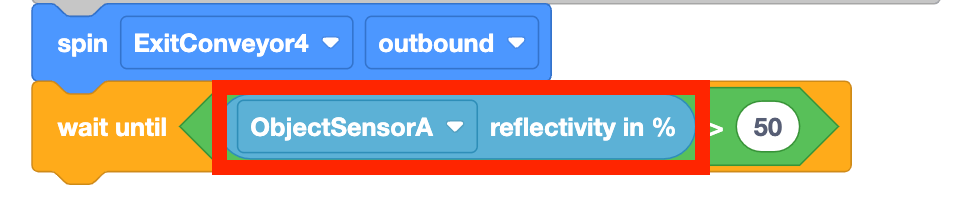
KhốiLớn hơnso sánh giá trị đầu tiên với giá trị thứ hai. Khối Lớn hơnhiện có trong dự án đang so sánh tỷ lệ phản xạ được Cảm biến đối tượng báo cáo với tham số '50' trước khi khai báo Boolean làĐúnghoặcSai.

Hãy nghĩ về mục tiêu của dự án này. Băng tải ra cần quay cho đến khi Cảm biến vật thể phát hiện ra vật thể, sau đó băng tải cần dừng lại. Các giá trị thu thập được trong Bài học trước có thể được sử dụng với khốiLớn hơnnày để xác định ngưỡng cần vượt quá trước khi dự án chuyển sang khối tiếp theo trong ngăn xếp.
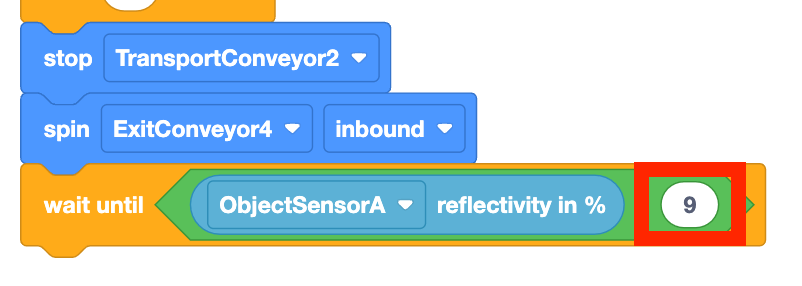
Thay đổi tham số thứ hai của khốiLớn hơnthành '9.'
Con số này dựa trên các giá trị thu thập được trong hoạt động của Bài học trước. Độ phản xạ được báo cáo là 10% khi Đĩa màu xanh lá cây nằm dưới Cảm biến đối tượng, do đó bất kỳ giá trị lớn hơn9% nào cũng sẽ được báo cáo làĐúng.
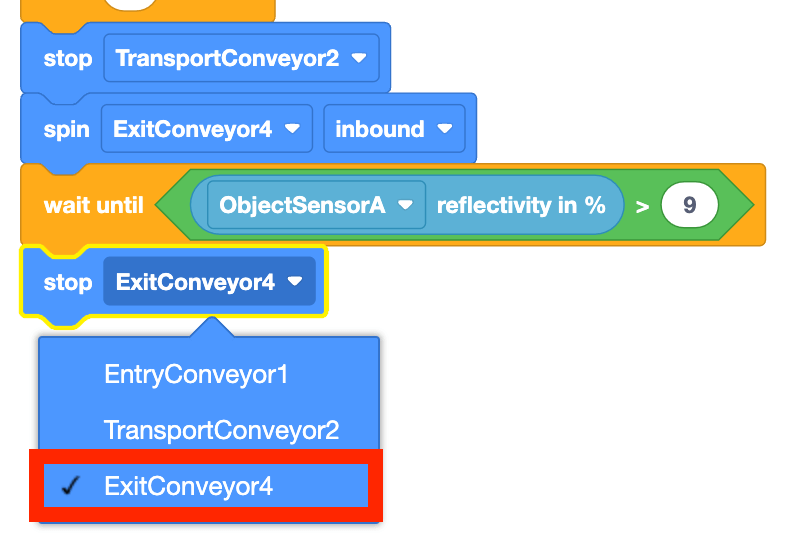
Thêm khốiStopvào cuối dự án. Đảm bảo tham số được đặt thành 'ExitConveyor4.'
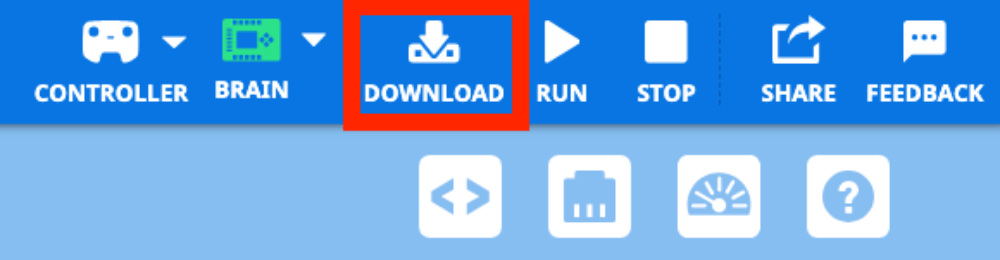
Hãy đảm bảo Brain được kết nối với VEXcode và tải xuống dự án.
Đọc mã và dự đoán băng tải sẽ làm gì khi dự án được chạy.
Ghi lại dự đoán của bạn vào sổ tay kỹ thuật.
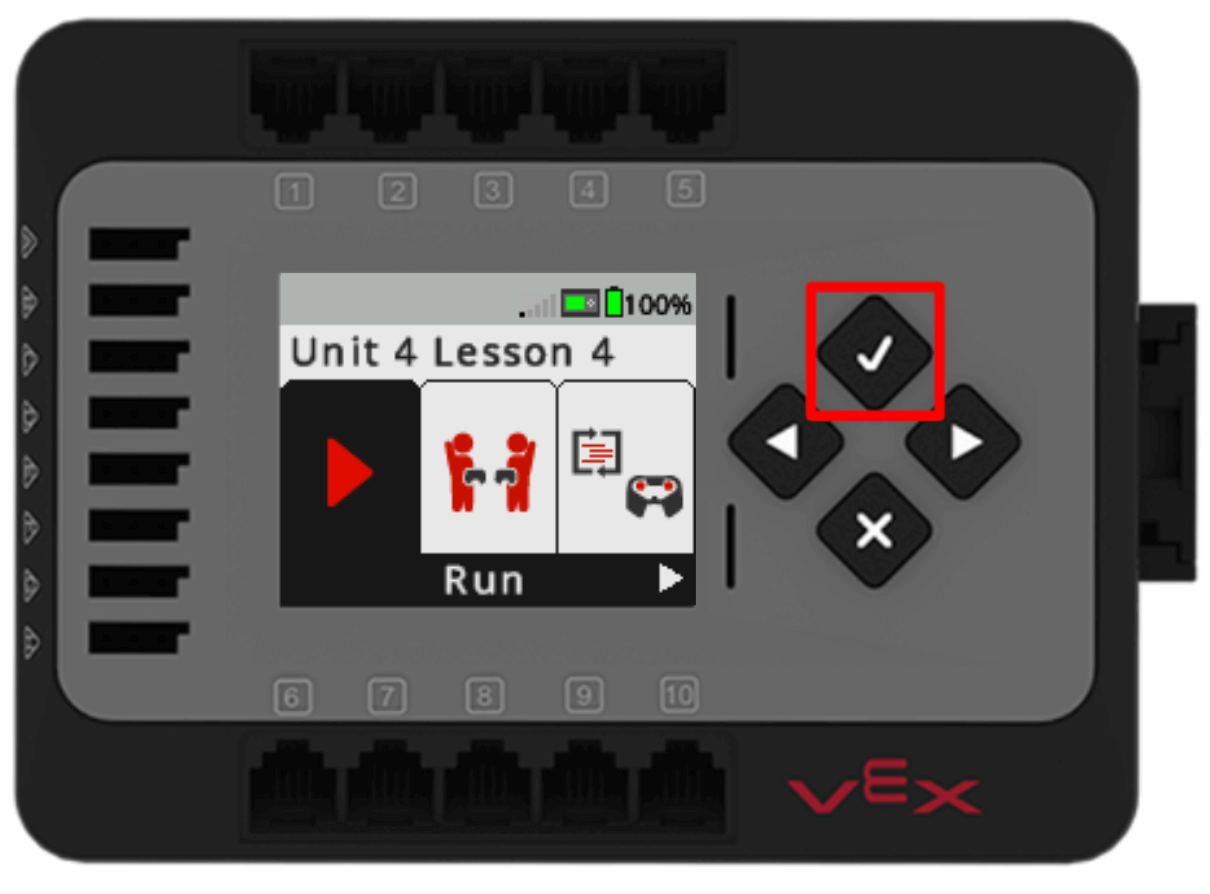
Đảm bảo có một đĩa màu xanh lá cây được đặt trên Băng tải đầu vào. Nhấn nút Kiểm tra trên Brain để chạy dự án để kiểm tra.
Quan sát hoạt động của băng tải khi dự án diễn ra.
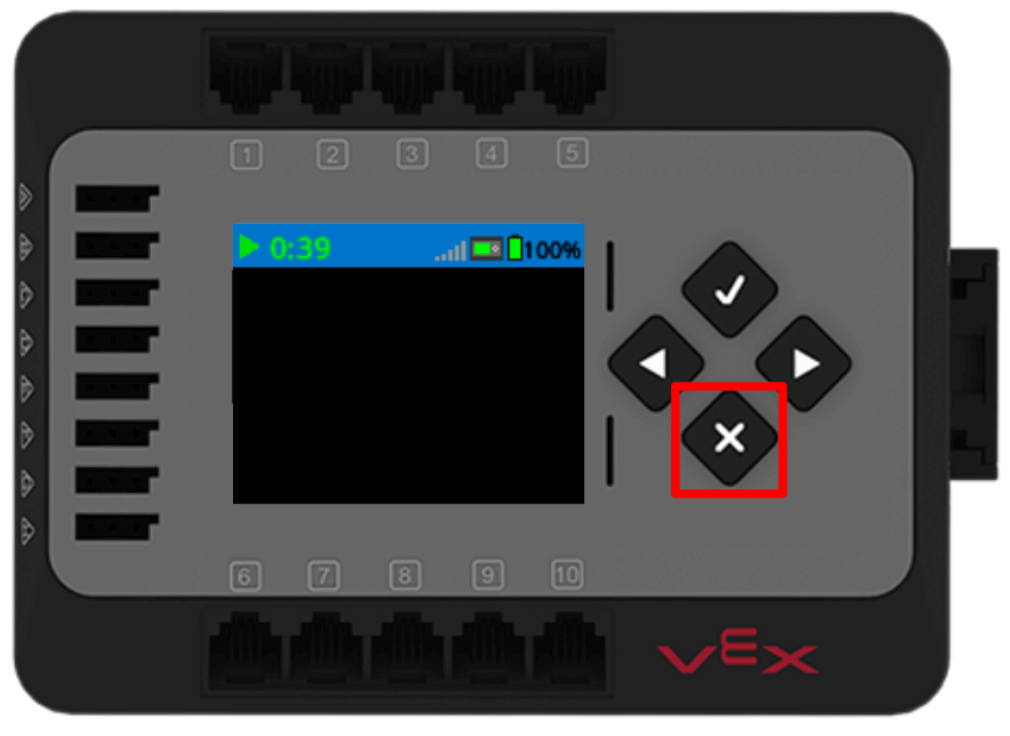
Nhấn nút X trên Brain để dừng dự án khi băng tải đã di chuyển xong. Ghi lại những quan sát của bạn vào sổ tay kỹ thuật.
Các băng tải có di chuyển như bạn dự đoán không? Đĩa xanh có được di chuyển đến Băng tải ra như dự định không? Tại sao nên hoặc không nên?
Đánh giá dự án
Chúng ta hãy xem lại luồng dự án trong dự án này, nơi dừng Băng tải thoát khi Đĩa màu xanh lá cây được Cảm biến đối tượng phát hiện. KhốiChờ cho đến khitạm dừng dự án không cho tiếp tục cho đến khi điều kiện bên trong được báo cáo là ĐÚNG.
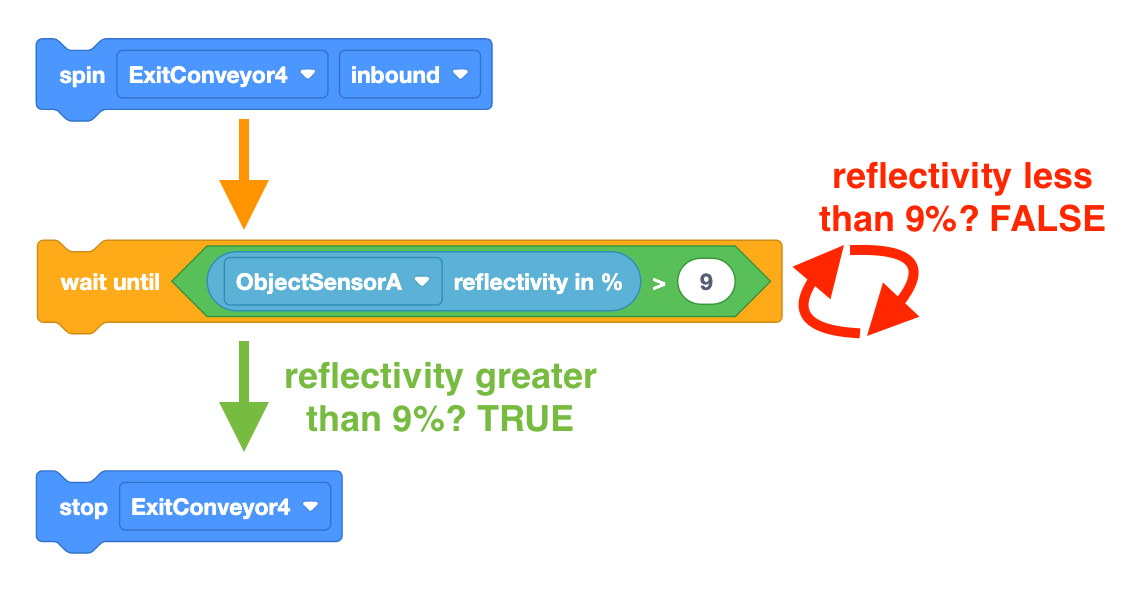
Vì khốiSpinlà khối không chờ nên nó cho phép CTE Workcell tiếp tục quay động cơ băng tải trong khi kiểm tra các giá trị từ Cảm biến đối tượng và tình trạng phản xạ lớn hơn 9%. Sau khi điều kiện trong khốiChờ cho đến khibáo cáo làĐÚNG, dự án sẽ chuyển sang khối tiếp theo trong ngăn xếp, dừng động cơ Băng tải thoát.
Để bạn biết
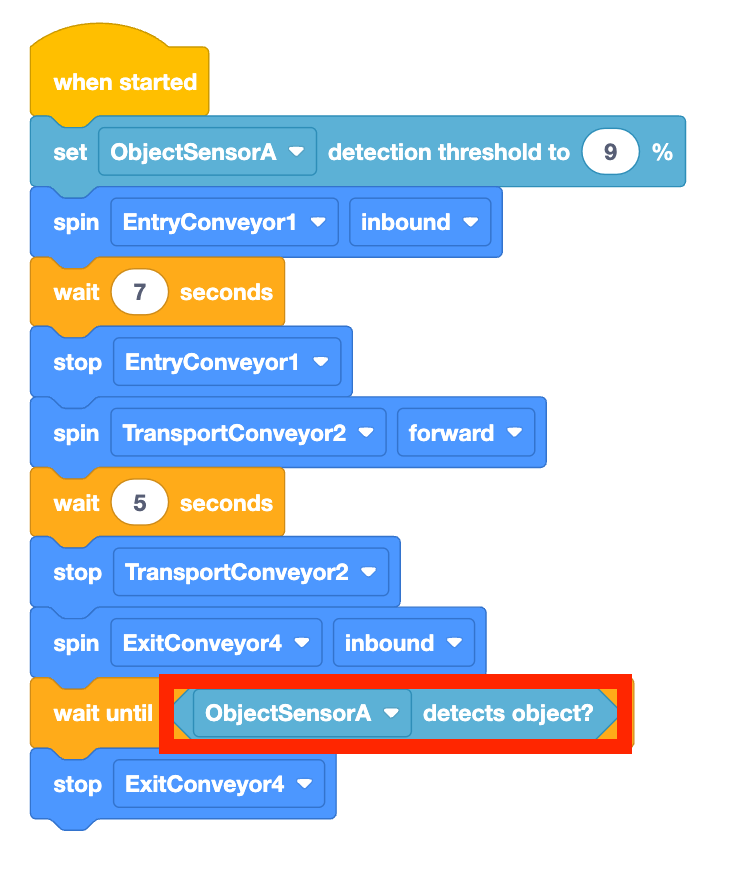
Một tổ hợp khối khác có thể được sử dụng trong một dự án để dừng Băng tải thoát khi có vật thể nằm dưới Cảm biến vật thể. KhốiSet Detection Thresholdcó thể được sử dụng khi bắt đầu một dự án để đặt ngưỡng, giống như khốiLarge thanđã làm trong dự án được xây dựng ở trên.

Sau khi ngưỡng được thiết lập, khối BooleanPhát hiện đối tượngcó thể được sử dụng trong bất kỳ khối nào có khoảng cách lục giác. Khối này sẽ báo cáo ĐÚNG khi ngưỡng phát hiện được xác định bởi khốiĐặt ngưỡng phát hiệnđược đáp ứng hoặc SAI khi tỷ lệ phản xạ thấp hơn ngưỡng đó.

Vì khốiPhát hiệnđối tượnglà khối Boolean nên nó có thể phù hợp trực tiếp với khốiĐợi cho đến khi.
Kiểm tra sự hiểu biết của bạn
Trước khi chuyển sang Bài học tiếp theo, hãy đảm bảo rằng bạn hiểu các khái niệm trong Bài học này bằng cách trả lời các câu hỏi sau vào sổ tay kỹ thuật của bạn.
Kiểm tra câu hỏi hiểu biết của bạn > (Google Doc / .docx / .pdf)
Chọn Tiếp theo > để chuyển sang Hoạt động Tổng hợp tất cả.