
Istruzioni per la costruzione
![]() Cassetta degli attrezzi per insegnanti
-
Prima di costruire
Cassetta degli attrezzi per insegnanti
-
Prima di costruire
-
Consiglia agli studenti di raccogliere tutte le parti necessarie per la costruzione prima di iniziare il processo di costruzione. Un'altra opzione per risparmiare tempo sarebbe che l'istruttore organizzasse tutte le parti necessarie prima dell'arrivo degli studenti.
-
Consigliare agli studenti di distinguere tra diverse lunghezze di Smart Cables e altre parti della build consultando il poster delle parti in scala incluso nel Super Kit. Si noti che le lunghezze dei cavi Smart non sono indicate sul cavo stesso e le parti elencate non sono in scala 1:1, sono relativamente in scala l'una rispetto all'altra.
![]() Teacher Toolbox
- Ruoli di costruzione degli
studenti
Teacher Toolbox
- Ruoli di costruzione degli
studenti
- Per suggerimenti sulla suddivisione dei componenti di build tra gli studenti di un team, clicca qui (Google / .docx / .pdf).
- Per idee su come coinvolgere gli studenti che completano una costruzione più rapidamente di altri, consulta questo articolo.
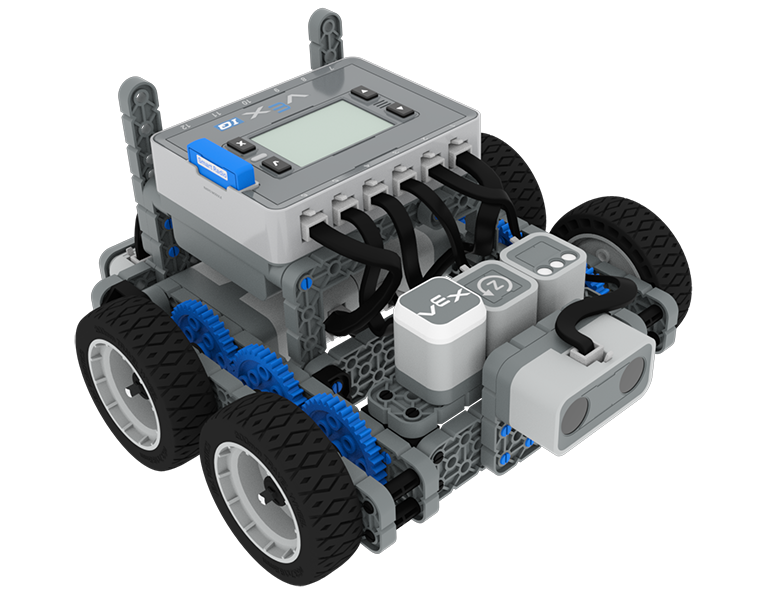
Costruisci il pilota automatico
Seguire le istruzioni di costruzione per costruire il pilota automatico. Una volta costruita la base di trasmissione standard, è necessario seguire i passaggi 102 - 117
Apri e segui i passaggi nelle istruzioni di costruzione per costruire l'Autopilot IQ.
![]() Teacher Toolbox
- Stime
del tempo per la costruzione
Teacher Toolbox
- Stime
del tempo per la costruzione
Se si seguono le istruzioni di costruzione, dovrebbero essere necessari circa 60 minuti per costruire il pilota automatico. Sono stati aggiunti altri dieci minuti al tempo totale di costruzione per tenere conto degli studenti che potrebbero aver bisogno di tempo extra.
![]() Estendi il tuo apprendimento
-
Ingranaggi
Estendi il tuo apprendimento
-
Ingranaggi
In che modo l'uso degli ingranaggi cambia il modo in cui si muove il robot?
Per prima cosa, eseguire il progetto Driver Control e poi il progetto Autopilot con gli ingranaggi a 36 denti ancora attaccati.
Confronta come si muove il robot in questi due progetti utilizzando gli ingranaggi.
Quindi, ricostruire il robot senza gli ingranaggi a 36 denti (fase 7 e 12).
Infine, eseguire nuovamente il progetto Driver Control e poi il progetto Autopilot con gli ingranaggi a 36 denti rimossi. Confronta come si muove il robot in questi due progetti senza l'uso degli ingranaggi.
![]() Cassetta degli attrezzi per insegnanti
-
Lista di controllo
Cassetta degli attrezzi per insegnanti
-
Lista di controllo
Una volta che tutti gli studenti hanno completato la costruzione, segui questa lista di controllo per assicurarti che siano pronti ad andare avanti.
-
Verificare che il pilota automatico sia costruito correttamente.
-
Verificare che la batteria sia carica e collegata al cervello del robot VEX IQ.
-
Controllare che tutti i cavi intelligenti siano collegati saldamente per una buona connessione.
-
Controlla che gli studenti abbiano messo via eventuali parti in più e abbiano ripulito la loro area.