
캐슬 크래셔
6 수업
이번 단원에서는 광학 센서와 거리 센서를 사용하여 버키볼로 만든 '성'을 찾아 부수고 없애서 '성 파괴자' 대회에서 점수를 획득하는 방법을 알아봅니다!
Castle Crasher 수업의 내용과 진행에 관한 교사 지원 자료와 비디오를 보려면 교사 포털을 방문하세요.
수업 1: 소개
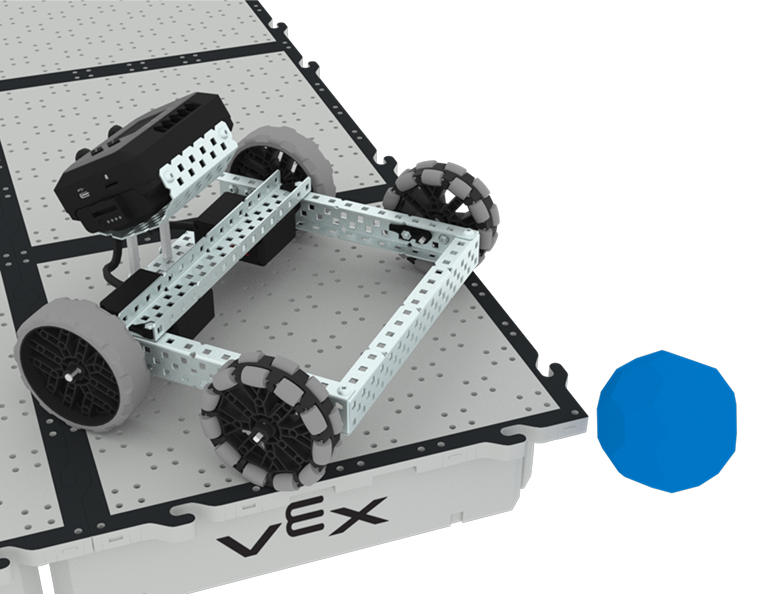
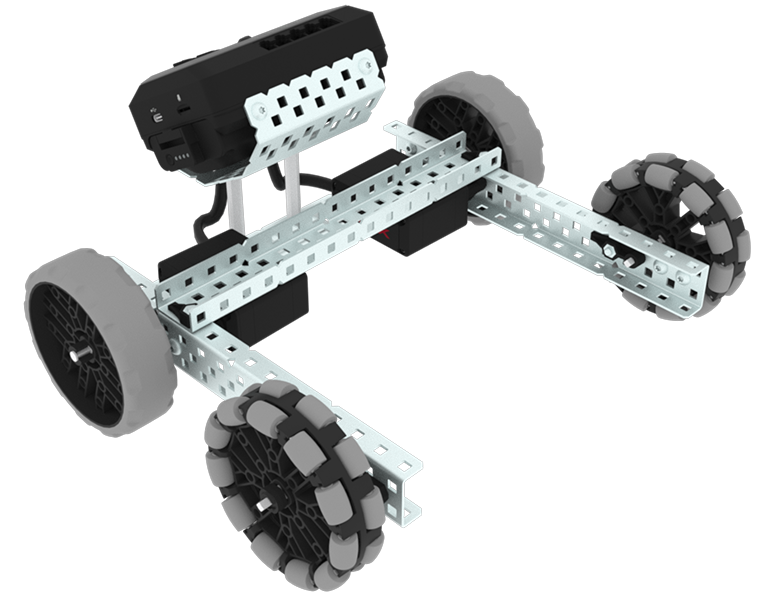
이번 수업에서는 캐슬 크래셔 대회에 대해 알아보고, 베이스봇을 만들고, 코딩을 시작할 준비를 합니다.
2강: 센서 없는 캐슬 크래셔
이번 수업에서는 버키볼 블리츠 챌린지 대회에 참가하기 위해 로봇의 각도를 계산하고 속도를 변경하는 방법을 배우게 됩니다.
3강: 캐슬 크래셔 + 거리 센서
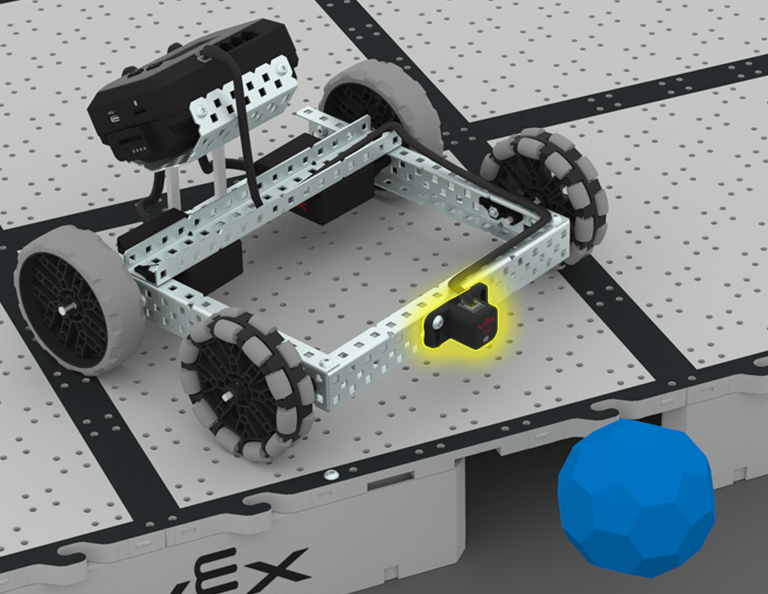
이번 수업에서는 거리 센서가 무엇이며 로봇에 어떻게 사용할 수 있는지 배우게 됩니다. 또한 [Wait until] 블록과 VEXcode EXP 프로젝트에서 이 블록을 사용하는 방법에 대해서도 배우게 됩니다. 그다음에는 배운 내용을 적용하여 센스 앤 스윕 챌린지에 참가하게 됩니다!
제4강: 알고리즘 만들기
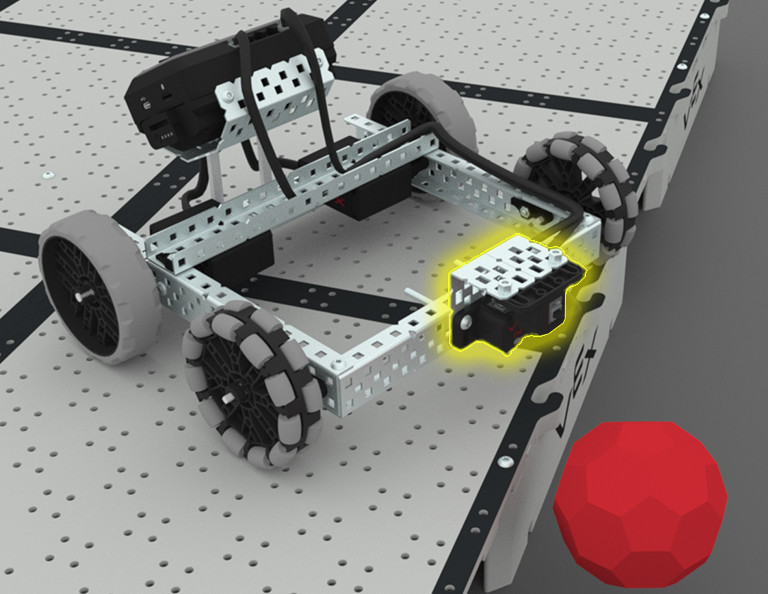
이번 수업에서는 광학 센서와 센서 피드백을 활용하는 알고리즘을 만드는 방법에 대해 배우게 됩니다. 그다음에는 로봇이 스스로 버키볼을 찾아 경기장 밖으로 밀어내는 스윕 더 필드 챌린지를 수행하도록 코딩해야 합니다.
5강: 성 침입자 대회
이번 수업에서는 이전 수업에서 배운 내용을 적용하여 성곽 파괴 대회에 참가하게 됩니다!

제6과: 결론
이 수업에서는 단원을 되돌아보고 여러분이 한 일과 STEM 경력 사이의 연관성을 파악합니다.