
탐구
이제 빌드를 마쳤으니, 어떤 결과가 나오는지 테스트해 보세요. 빌드를 탐색한 후 엔지니어링 노트북에 이 질문에 답하세요.
빌드의 33단계에서 고강도 84개 이빨 기어를 더 작은 직경의 고강도 60개 이빨 기어로 바꾸면 팔의 속도는 어떻게 변할까요?

이 질문에 대한 도움을 받으려면, 로봇의 84개 이빨 기어의 회전 속도와 고강도 12개 이빨 피니언(제작 단계 36에서 사용)의 회전 속도(RPM)를 비교하세요. 팔을 부드럽게 위아래로 움직여 보세요. 귀하의 답변을 귀하의 관찰을 바탕으로 뒷받침해 주시기 바랍니다.
![]() 교사 도구 상자
교사 도구 상자
답변은 팔의 속도 변화가 있을 것임을 나타내야 합니다. 여기에는 이빨이 적고 직경이 작은 피니언이 이빨이 많고 직경이 큰 기어보다 더 빨리 회전한다는 관찰 결과가 포함될 수 있습니다. 올바른 결론은 팔이 더 빨리 회전한다는 것입니다.
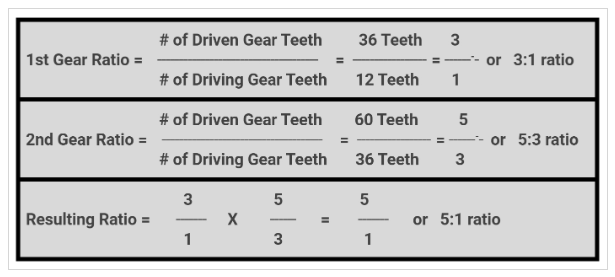
학생이 기어비라는 용어를 사용하는 경우 올바르게 사용되었는지 확인하세요. 기어비 = 구동 이빨 수/구동 이빨 수 또는 84 & 12 이빨 기어의 경우 7:1 기어비이고 60 & 12 이빨 기어의 경우 5:1 기어비입니다.
다음은 기어비의 예입니다.
기어비에 대한 자세한 내용은 다음 문서 "간단한 기어비 사용 방법"을 참조하세요.