
Concurreren
Nu je hebt geleerd hoe je je robot kunt programmeren om hem een specifiek aantal graden te laten draaien met behulp van hoekmetingen, je hebt onderzocht hoe je een pad kunt programmeren voor je robot om Buckyballs van het veld te verwijderen en je hebt de snelheid van je robot aangepast, ben je klaar voor de Buckyball Blitz Challenge.
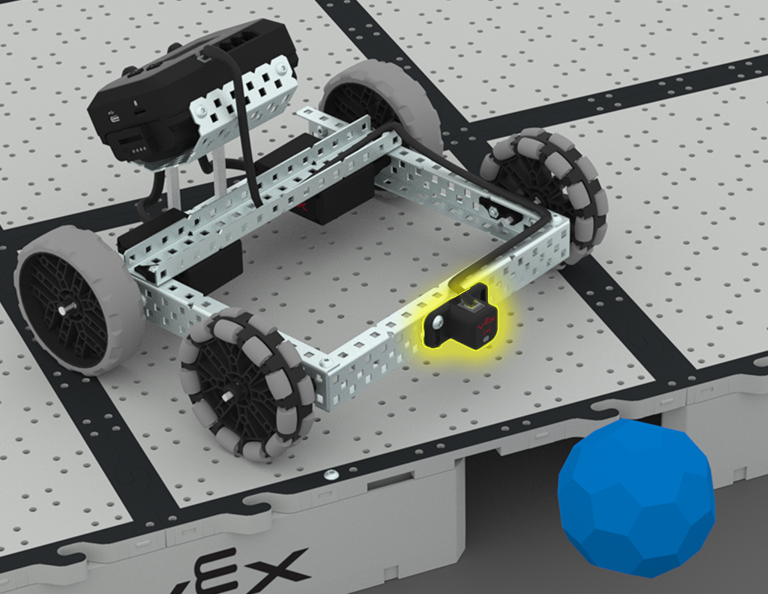
Het doel van deze uitdaging is om alle vijf Buckyballs zo snel mogelijk van het veld te verwijderen. De onderstaande animatie laat zien hoe het veld moet worden opgezet en wat een mogelijke manier is om de Buckyballs van het veld te verwijderen. De robot die het snelst alle Buckyballs wegspeelt, wint. Volg de stappen in dit document om de Buckyball Blitz-uitdaging te voltooien.
Zodra je de Buckyball Blitz-uitdaging hebt voltooid, neem je contact op met je leraar. Zorg ervoor dat u de resultaten van de uitdaging in uw technisch notitieboekje hebt vastgelegd.
Afsluitende reflectie
Nu je een strategie hebt bedacht en hebt deelgenomen aan de Buckyball Blitz Challenge, is het tijd om terug te blikken op wat je in deze les hebt geleerd en gedaan. Begin een nieuwe pagina in je technische notitieboekje om met je reflectie te beginnen.
Geef in uw technische notitieboekje aan dat u op elk van de volgende concepten een beginner, leerling of expert bent. Geef een korte uitleg waarom u uzelf die beoordeling voor elk concept hebt gegeven:
- Een pad plannen en je robot programmeren om Buckyballs van het veld te duwen
- Gebruik hoekmetingen om uw robot een bepaald aantal graden te draaien
- Begrijpen hoe toenemende en afnemende snelheid de beweging van een robot beïnvloedt
Gebruik deze tabel om te bepalen in welke categorie u valt.
| Deskundige | Ik heb het gevoel dat ik het concept volledig begrijp en dit aan iemand anders kan uitleggen. |
| Leerling | Ik denk dat ik het concept goed genoeg begrijp om aan de uitdaging deel te nemen. |
| Beginner | Ik heb het gevoel dat ik het concept niet begrijp en weet niet hoe ik de uitdaging moet voltooien. |
Wat is het volgende?
In deze les heb je een pad gepland en je robot geprogrammeerd om Buckyballs van het veld te duwen. Je hebt aandrijfblokken en hoekmetingen gebruikt om je robot een specifiek aantal graden te laten draaien. Ook heb je de snelheid onderzocht en hoe het verhogen of verlagen daarvan de beweging van een robot beïnvloedt. Toen deed je mee aan de Buckyball Blitz Challenge. In de volgende les leert u het volgende:
- Leer meer over de afstandssensor
- Gebruik sensorfeedback om uw robot te programmeren om meerdere Buckyballs van een verhoogd veld te duwen
- Doe mee aan de Sense and Sweep Challenge
Selecteer < Terug naar les om terug te gaan naar het lesoverzicht.
Selecteer Volgende Les > om door te gaan naar Les 3 en meer te leren over de afstandssensor.