
Toneelstuk
Deel 1 - Stap voor stap
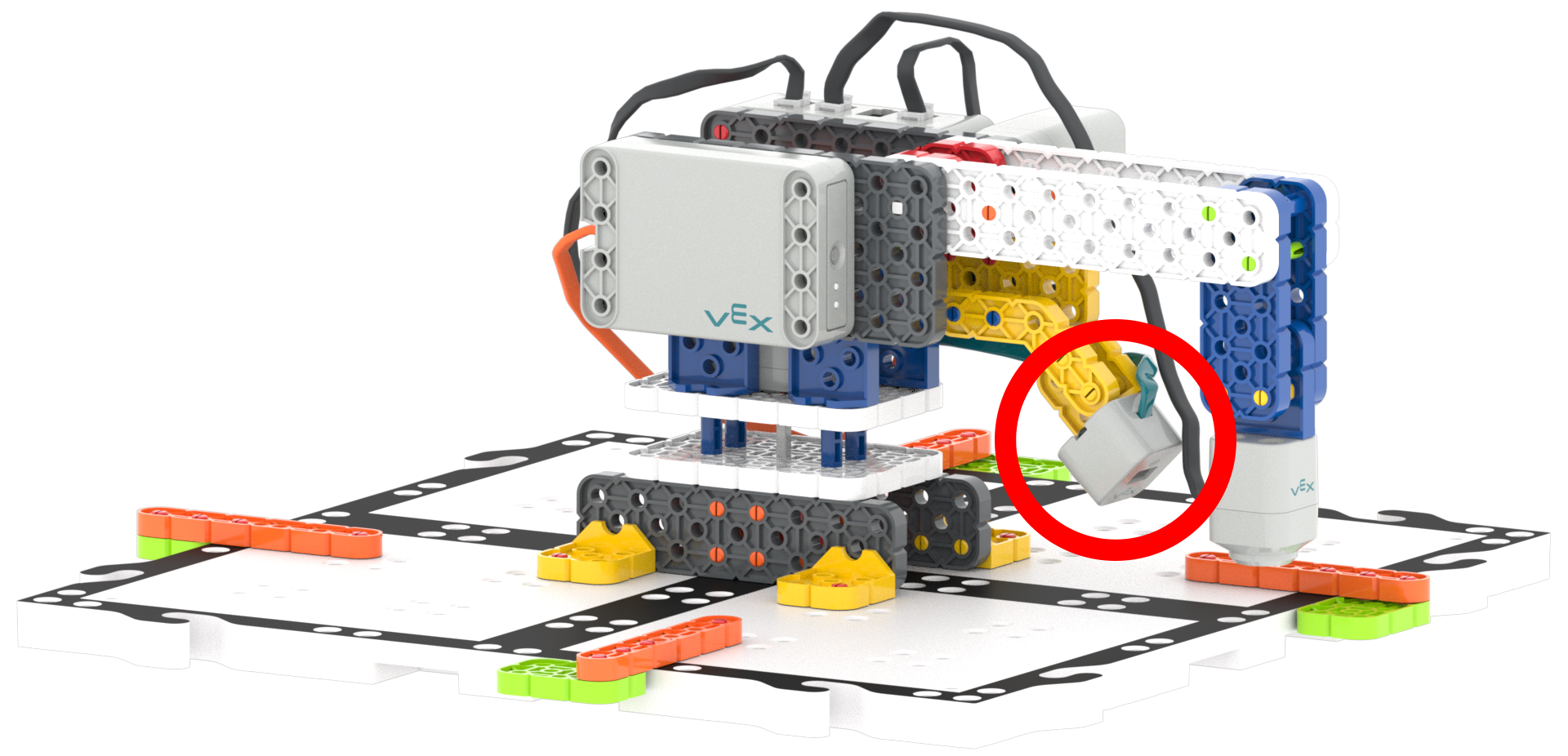
- InstructieGeef de leerlingen de opdracht een project te maken waarbij de robotarm wacht tot er een schijf wordt gedetecteerd (met behulp van de oogsensor) en de schijf vervolgens beweegt met behulp van de elektromagneet. Bekijk de onderstaande video om te zien hoe de robotarm de schijf succesvol kan verplaatsen door deze eerst te detecteren en deze vervolgens met behulp van de elektromagneet naar rechts te schuiven.
Videobestand
- ModelModel hoe je een project bouwt met behulp van het [Wachten tot] blok en de Oogsensor. Laat de leerlingen meekijken op een projectiescherm of via de Lab 4-diavoorstelling.
- Before beginning, ensure students have connected their device to their Robot Arm (2-Axis) and that the Robot Arm is configured. Indien nodig, modelleer de stappen in dit artikel Configureer een robotarm om leerlingen te begeleiden bij het configureren van hun robotarm.
Opmerking: Wanneer u uw robotarm voor het eerst op uw apparaat aansluit, kan de in de hersenen ingebouwde gyroscoop kalibreren, waardoor de robotarm even zelfstandig beweegt. Dit is normaal gedrag. Raak de robotarm niet aan tijdens het kalibreren.
- Laat studenten hun Lab 3 Deel 2-project openen. Het nieuwe project bouwt voort op dit project. Selecteer "Opslaan als" of "Opslaan op uw apparaat" (afhankelijk van welke VEXcode GO-versie u gebruikt) en wijzig de naam van het project Lab 4 Deel 1.

De naam van het project wijzigen - Als er studenten zijn die niet aanwezig waren voor Lab 3 of hun project niet kunnen vinden, laat ze dan de Lab 3 Part 2-oplossing uit de Lab 4 Image Slideshow opnieuw maken.
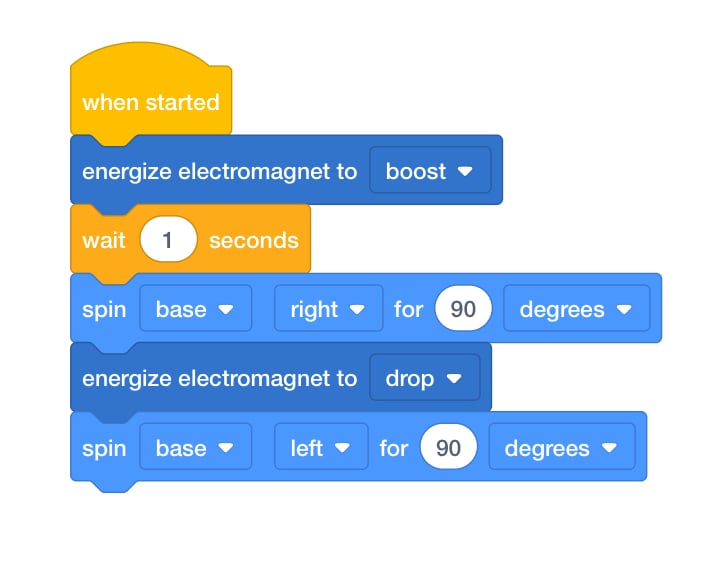
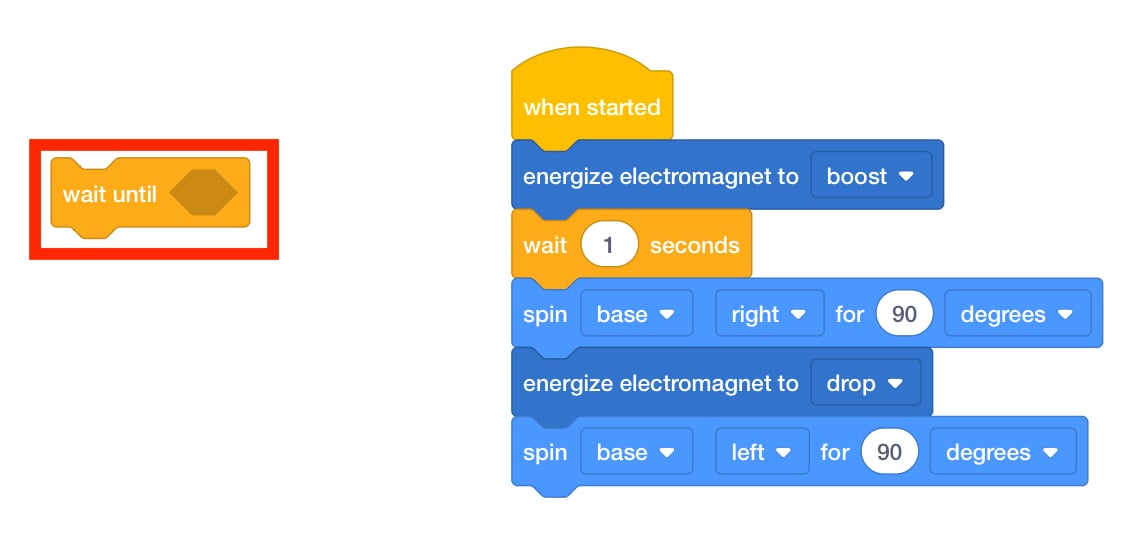
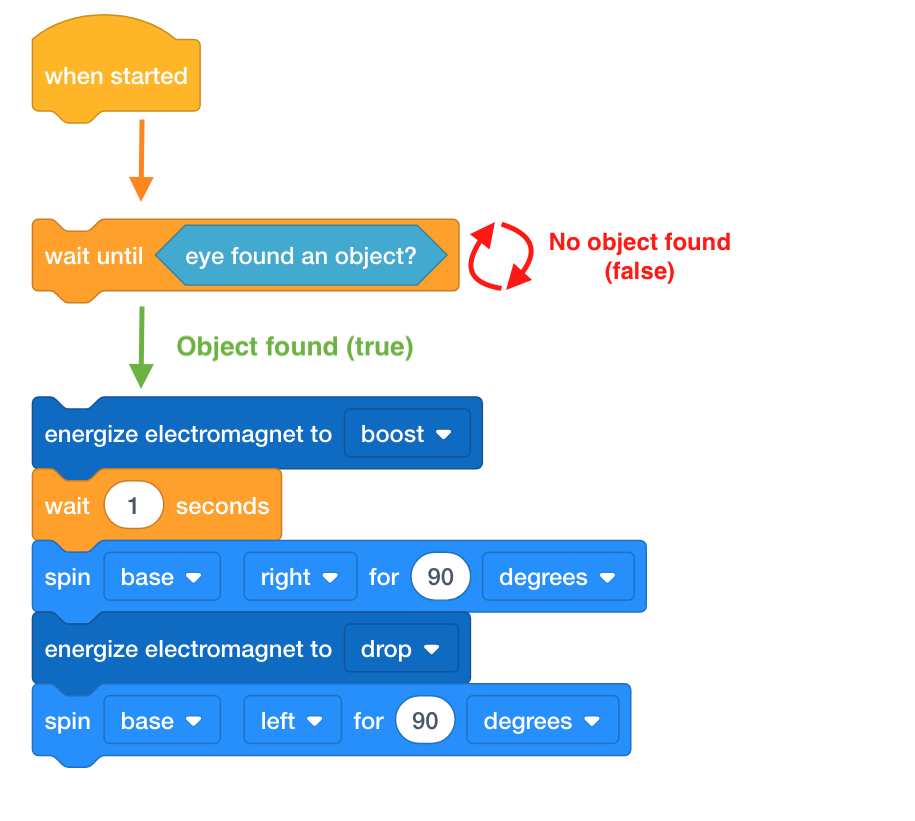
Lab 3 Deel 2 Oplossing - Sleep het blok [Wait until] naar de werkruimte. Leg uit dat het blok [Wacht tot] Booleaanse voorwaarden accepteert en het project zal stoppen totdat het blok binnenin een voorwaarde als ‘Waar‘ meldt.
 Wachttijd
Wachttijd toevoegen tot blok -
Dit project zal de oogsensor gebruiken om te detecteren of een object aanwezig is, om het op te pakken. De oogsensorgegevens zijn de Booleaanse toestand waarop we wachten.
Oogsensor -
Zoek het <Eye found object> blok in de Toolbox onder ‘Sensing’. Leg uit dat het een Booleaans blok <Eye found object> is dat waar of onwaar rapporteert, zodat het kan worden gebruikt met het blok [Wait until].
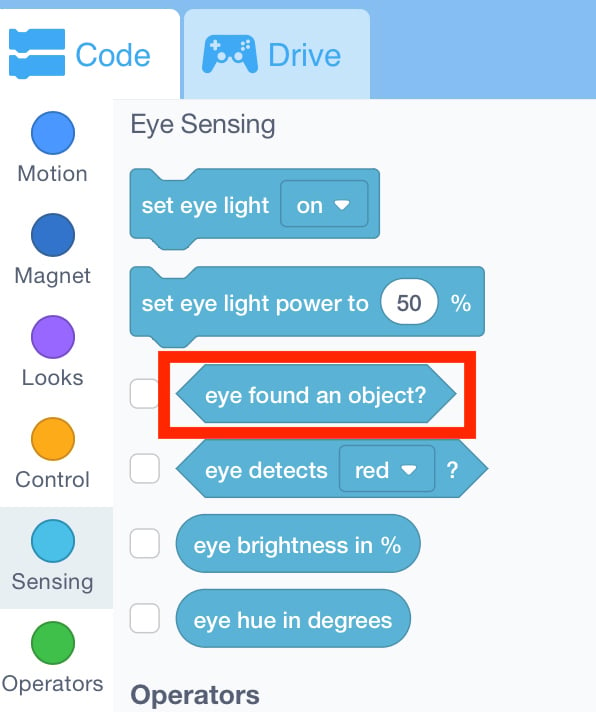
Oogdetectiecategorie - Sleep de <Eye found object> naar het blok [Wait until].
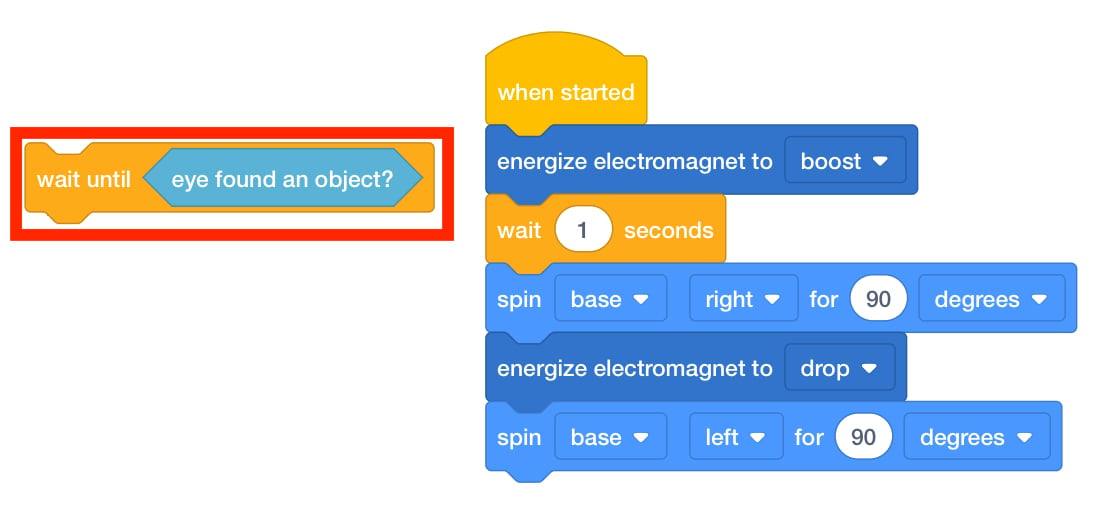
Toevoegen <Eye Found Object> aan [Wait until] - Vraag de leerlingen waar ze willen dat de oogsensor een object controleert. Sleep het blok [Wachten tot] naar het begin van het project.
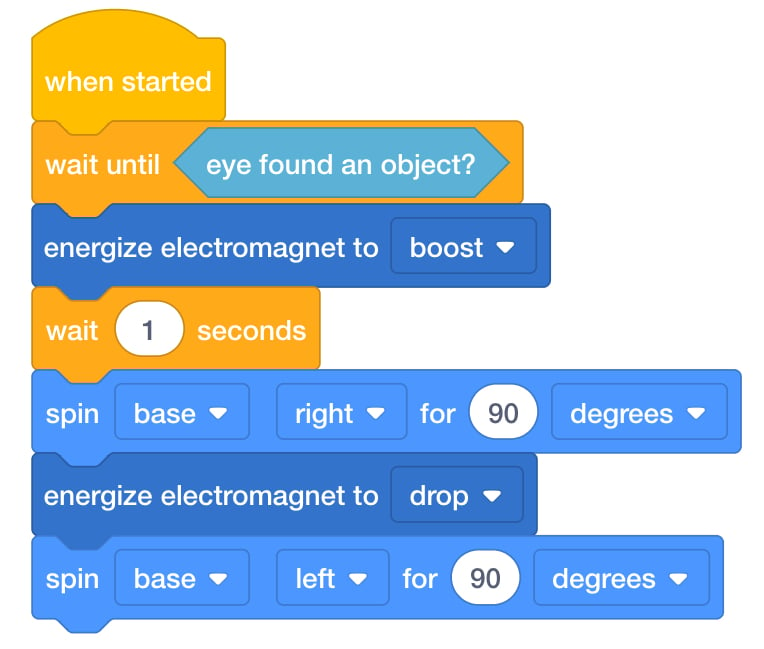
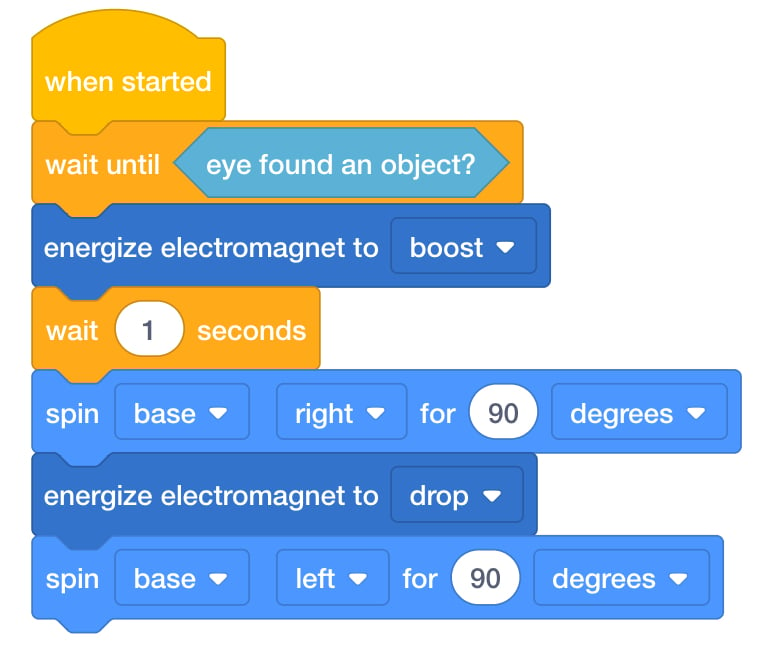
Lab 4 Deel 1 Oplossing - Laat leerlingen een schijf op de elektromagneet plaatsen en het project starten en zien hoe hun robotarm beweegt. Ze moeten het project starten met een schijf die aan de elektromagneet is bevestigd. Als ze problemen hebben met het gebruik van de oogsensor, laat ze dan deze stappen opnieuw volgen. Raadpleeg indien nodig het artikel Een project starten in VEXcode GOen modelleer voor studenten de stappen in dit artikel om een project te starten.
- FaciliterenFaciliteren van gesprekken over projectstroom terwijl studenten hun code testen. Gebruik de oplossing in de Lab 4-diavoorstelling om hun projecten te controleren terwijl u circuleert.
Lab 4 Deel 1 Oplossing Stel hen enkele van de volgende vragen om een discussie op gang te brengen.
- Hoe zou u in uw eigen woorden uitleggen wat een Booleaanse aandoening is?
- Wat denk je dat er zou gebeuren als we het blok [Wait until] naar een ander deel van het project zouden verplaatsen? Hoe zou de projectstroom veranderen?
- Als u aan het einde van het project een tweede schijf wilt verplaatsen, welke andere blokken moet u dan toevoegen?
- Hoe is dit project vergelijkbaar of anders dan het project dat je in Lab 3 hebt gemaakt?
- Herinner groepen eraan om vragen te stellen als ze in de war raken. Niet elke poging zal goed verlopen. Elke keer dat ze het project uitvoeren, moeten studenten identificeren wat er mis is gegaan en brainstormen over ideeën om het op te lossen. Trial and error wordt verwacht.
Als studenten gefrustreerd zijn en meer hulp nodig hebben, laat ze dan het doel van het project aan jou herhalen.
- VraagVraag studenten welke apparaten ze kennen die een oogsensor kunnen gebruiken? (Vacuümrobot, elektronische deurbellen)
Als ze het moeilijk vinden om een lijst te maken, laat ze dan een lijst maken met apparaten waarvoor ze een oogsensor willen hebben.
- Voorbeeld: Ik zou een oogsensor op mijn achterdeur willen, dus elke keer als de hond naar buiten wilde, zou de oogsensor ons vertellen dat de hond voor de deur stond.
Mid-Play Break & Groepsdiscussie
Zodra elke groep een project heeft gemaakt met behulp van de oogsensor en het blok [Wacht tot], komt u samen voor een kort gesprek.
Laten we het hebben over de projectstroom met het blok [Wachten tot].
- Waarom was het belangrijk om het blok [Wachten tot] aan het begin van het project te plaatsen?
- Wat zou er gebeuren met onze projectstroom als het blok [Wait until] zich op een andere plaats zou bevinden?
- Zou onze robotarm nog steeds werken zoals we wilden?
Deel 2 - Stap voor stap
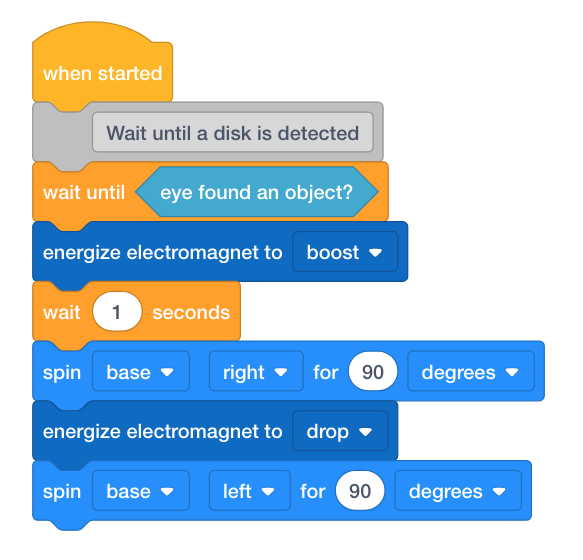
- Instrueer studenten dat ze hun project gaan herhalen om de robotarm te laten wachten tot er een schijf wordt gedetecteerd, til de schijf op, verplaats de schijf naar een ander deel van de tegel, laat de schijf vallen en keer terug naar de startlocatie. Bekijk de onderstaande video om te zien hoe de robotarm de schijf met succes kon verplaatsen door eerst de schijf te detecteren en vervolgens op te tillen om naar een andere locatie te gaan met behulp van de elektromagneet.
Videobestand
- Modelmodelvoor studenten hoe het [Spin for] -blok te wijzigen om de armmotor te bedienen.
-
Studenten moeten hun Lab 4 Deel 1-project openen en het Lab 4 Deel 2 hernoemen. Before beginning, ensure students have connected their device to their Robot Arm (2-Axis) and that the Robot Arm is configured.

De naam van het project wijzigen - Sleep het blok [Draai voor] naar de werkruimte. Vraag de leerlingen of ze zich herinneren hoe ze van ‘basis‘ naar ’arm‘ kunnen veranderen.
 [Spin for]
[Spin for] toevoegen aan de werkruimte - Bekijk de animatie in de Lab 4 Image Slideshow en vraag de leerlingen waar extra [Spin for]-blokken nodig zijn om de arm op de getoonde manier te bewegen.
- Studenten kunnen commentaarblokken gebruiken om zichzelf eraan te herinneren wat elke stap van het proces is. Leg uit dat opmerkingen alleen voor de codeur zijn, niet voor de robot; ze hebben dus geen invloed op de projectstroom.

[Comment] blok - Model dat een opmerkingenblok naar de werkruimte sleept en typ een van de stappen in het blok.
- Wacht tot een schijf wordt gedetecteerd
- Til de schijf op
- Verplaats de schijf naar een ander deel van de tegel
- Laat de schijf vallen
- Keer terug naar de startlocatie
- Leg uit dat opmerkingen alleen voor de codeur zijn, niet voor de robot; ze hebben dus geen invloed op de projectstroom.
[Comment] blok toegevoegd - Laat leerlingen een schijf op de elektromagneet plaatsen en het project starten en zien hoe hun robotarm beweegt. Ze moeten het project starten met een schijf die aan de elektromagneet is bevestigd. Raadpleeg indien nodig het artikel Een project starten in VEXcode GOen modelleer voor studenten de stappen in dit artikel om een project te starten.
-
- FaciliterenFaciliteren van gesprekken over projectstroom terwijl studenten hun projecten beginnen te herhalen.

Uw robotarm moet... Stel vragen als:
- Wat denk je dat er zou gebeuren als het blok [Wachten tot] werd toegevoegd nadat de armmotor was opgesponnen? Hoe zou dat de flow van je project veranderen?
- Waarom denk je dat we willen dat de robotarm terugkeert naar de startlocatie nadat hij de schijf heeft afgezet?
- Hoe kunnen reactieblokken u helpen de flow van uw project te begrijpen terwijl u aan het coderen bent?
- Als u een tweede schijf naar een gloednieuwe locatie wilt verplaatsen, welke andere blokken moet u dan toevoegen?
- Herinner groepen eraan om vragen te stellen als ze in de war raken. Niet elke poging zal goed verlopen. Elke keer dat ze het project uitvoeren, moeten studenten identificeren wat er mis is gegaan en brainstormen over ideeën om het op te lossen. Trial and error wordt verwacht.
Als studenten gefrustreerd zijn en meer hulp nodig hebben, laat ze dan het doel van het project aan jou herhalen.
Ze moeten hun Lab 4 Part 1-project als leidraad gebruiken.
De Lab 4 Deel 2 Oplossing is ook beschikbaar voor referentie van de leraar.

Lab 4 Deel 2 Oplossing - VraagVraag studenten welke andere taken ze mogelijk kunnen voltooien met zowel de armmotor als de basismotor? Hoe zit het met een grotere robotarm?