
يلعب
الجزء الأول - خطوة بخطوة
- تعليماتأرشد الطلاب إلى أنهم سوف يقومون بإنشاء مشروع حيث ينتظر ذراع الروبوت حتى يتم
اكتشاف القرص (باستخدام مستشعر العين)، ثم يحرك القرص باستخدام المغناطيس الكهربائي. شاهد الفيديو أدناه لترى
كيف يستطيع الذراع الروبوتي تحريك القرص بنجاح من خلال استشعاره أولاً ثم تحريكه إلى اليمين باستخدام
المغناطيس الكهربائي.
ملف الفيديو
- النموذجنموذج لكيفية بناء مشروع باستخدام كتلة [انتظر حتى] ومستشعر العين. اطلب من الطلاب
أن يتابعوك على شاشة العرض أو من خلال عرض الشرائح في المختبر 4.
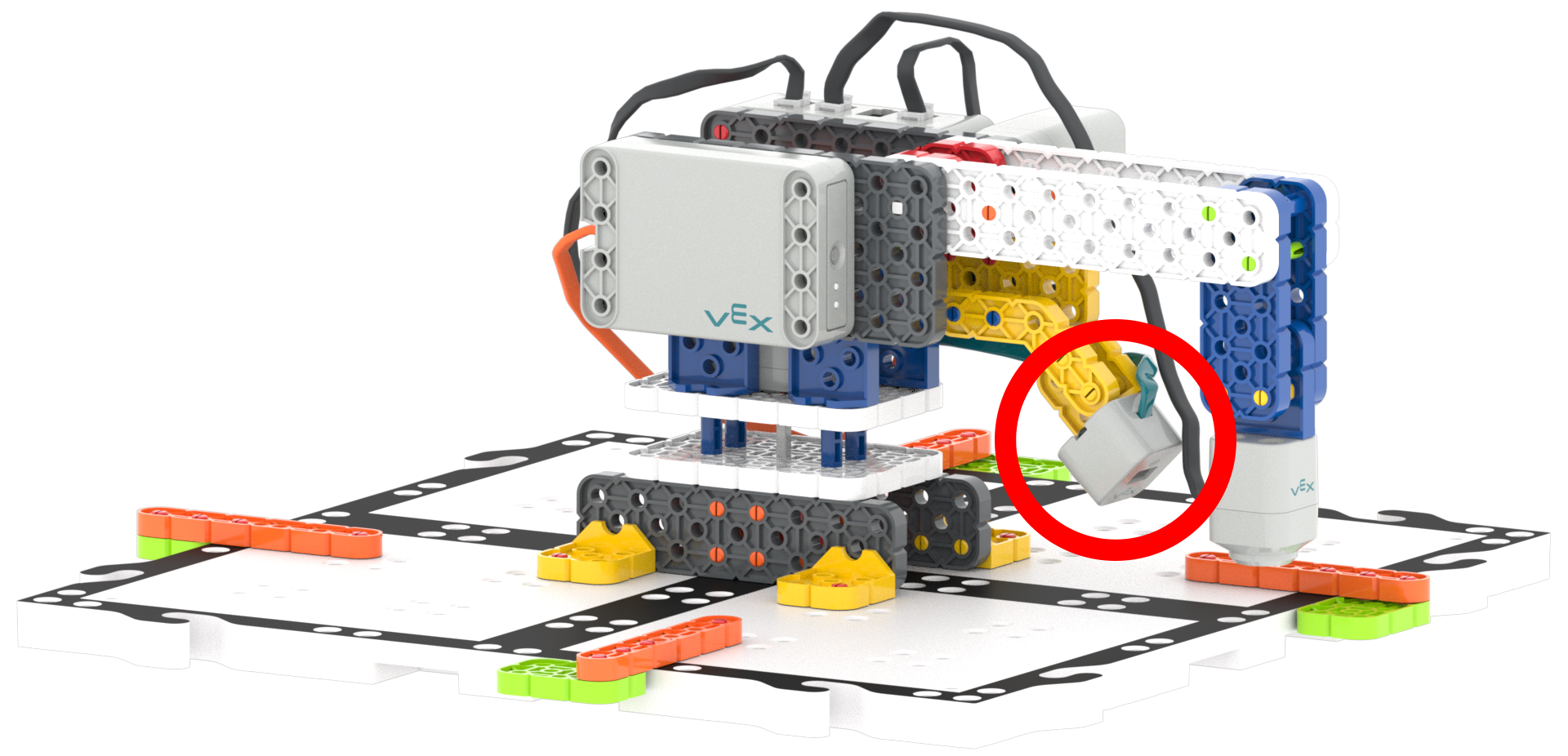
- قبل البدء، تأكد من أن الطلاب لديهم توصيل أجهزتهم إلى ذراع الروبوت الخاص بهم (محورين) وأن ذراع الروبوت تم تكوينه. إذا لزم الأمر، قم بتصميم الخطوات الواردة في هذه المقالةتكوين ذراع الروبوت لتوجيه الطلاب في عملية تكوين الروبوت الخاص بهم ذراع.
ملحوظة: عندما تقوم بتوصيل ذراع الروبوت الخاص بك بجهازك لأول مرة، فإن الجيروسكوب المدمج في قد يقوم الدماغ بالمعايرة، مما يتسبب في تحرك ذراع الروبوت من تلقاء نفسه للحظة. هذا سلوك متوقع، لا تلمس ذراع الروبوت أثناء معايرتها.
- اطلب من الطلاب فتح مشروع المختبر الجزء 2 الخاص بهم. وسوف يبني المشروع الجديد على هذا المشروع. حدد "حفظ باسم" أو "حفظ على جهازك" (اعتمادًا على إصدار VEXcode GO الذي تستخدمه) وأعد تسمية المشروع المختبر 4 الجزء 1.

إعادة تسمية المشروع - إذا لم يكن هناك أي طلاب حاضرين في المختبر 3 أو لم يتمكنوا من العثور على مشروعهم، فاطلب منهم إعادة إنشاء حل المختبر الجزء 2 من عرض الشرائح الخاص بالصور للمختبر 4.
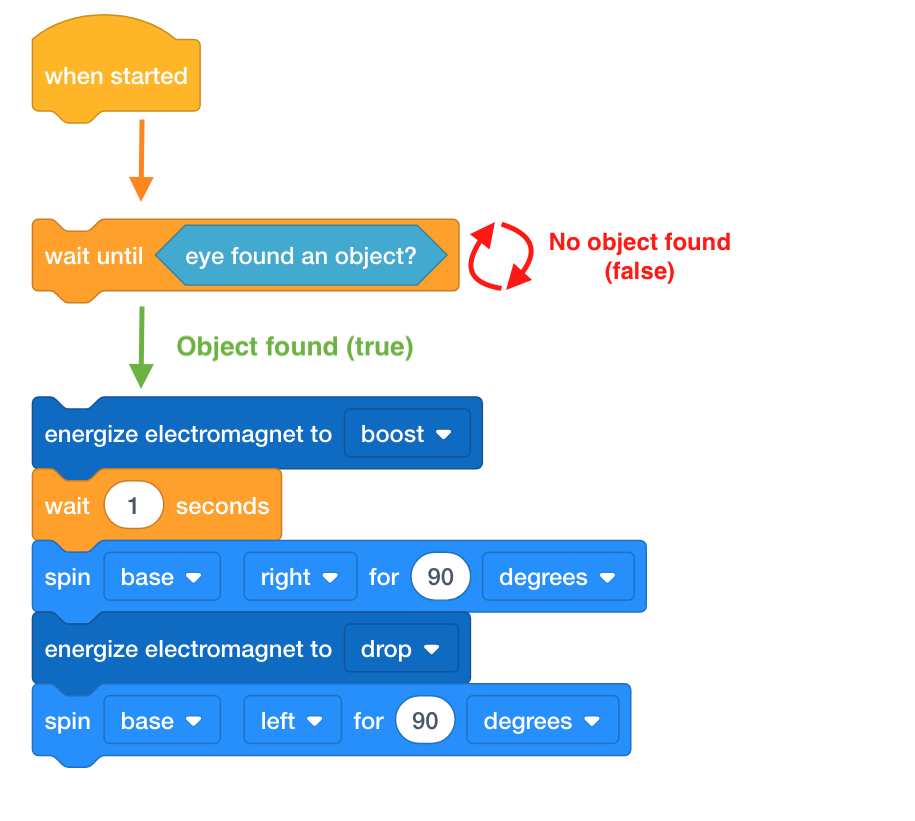
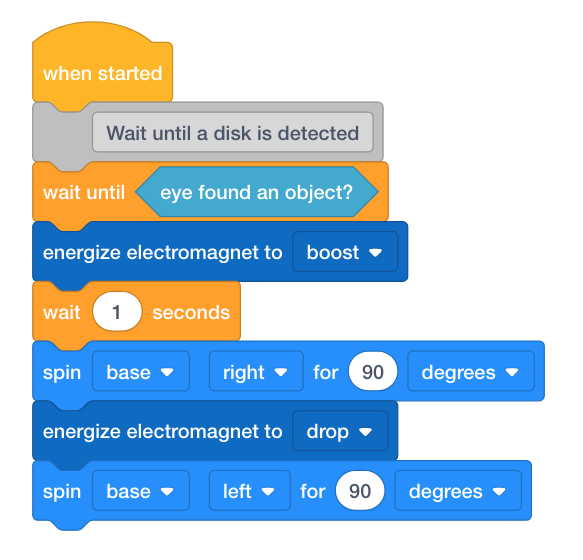
حل الجزء الثاني من المختبر 3 - اسحب الكتلة [انتظر حتى] إلى مساحة العمل. اشرح أن كتلة [انتظر حتى] تقبل الشروط المنطقية، وستوقف تشغيل المشروع حتى تقوم الكتلة الموجودة داخلها بالإبلاغ عن الشرط على أنه "صحيح".
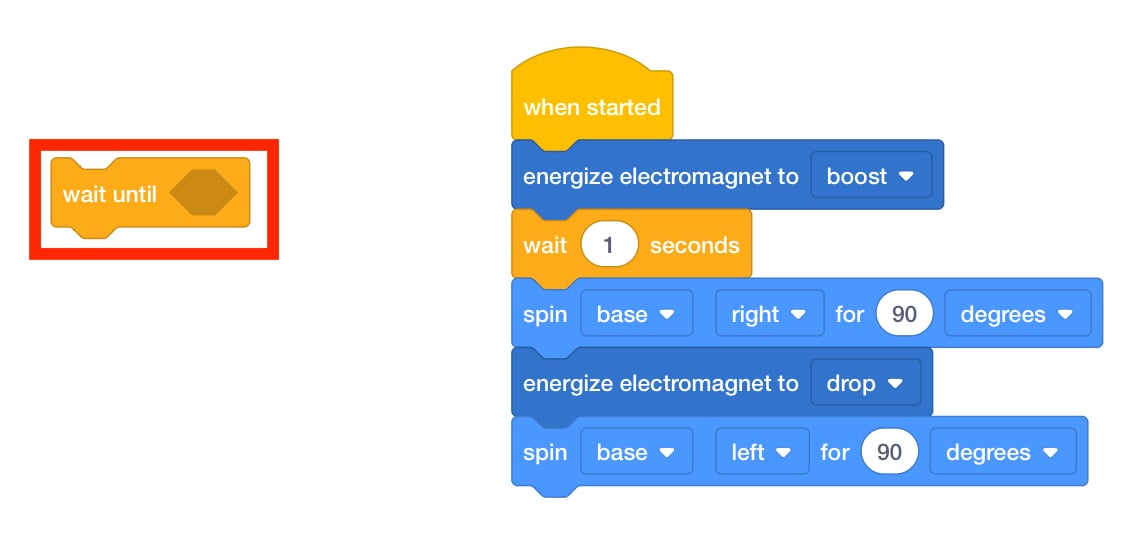
إضافة الانتظار حتى الكتلة -
سيستخدم هذا المشروع مستشعر العين لاكتشاف وجود جسم ما، وذلك من أجل التقاطه. بيانات مستشعر العين هي الحالة المنطقية التي ننتظرها.
مستشعر العين -
ابحث عن الكتلة <Eye found object> في صندوق الأدوات ضمن "الاستشعار". اشرح أن <Eye found object> عبارة عن كتلة منطقية ستُظهر القيمة True أو False، لذا يمكن استخدامها مع كتلة [انتظر حتى].
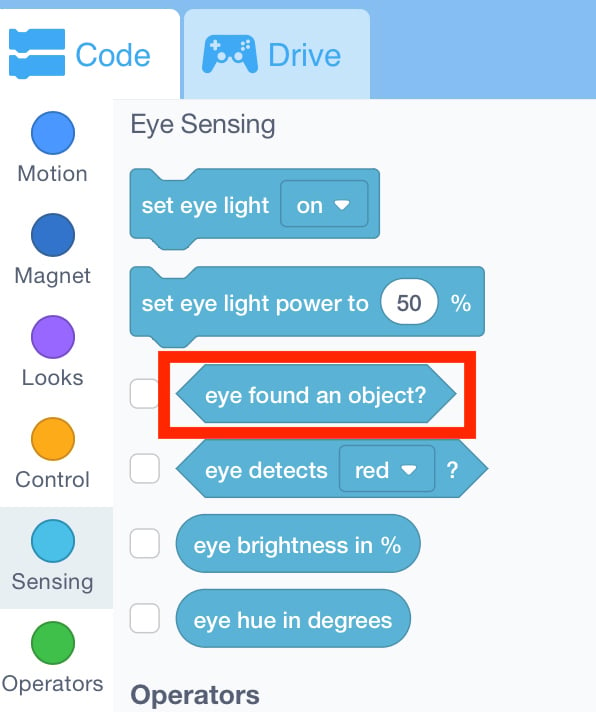
فئة استشعار العين - اسحب الرقم <Eye found object> إلى كتلة [انتظر حتى].
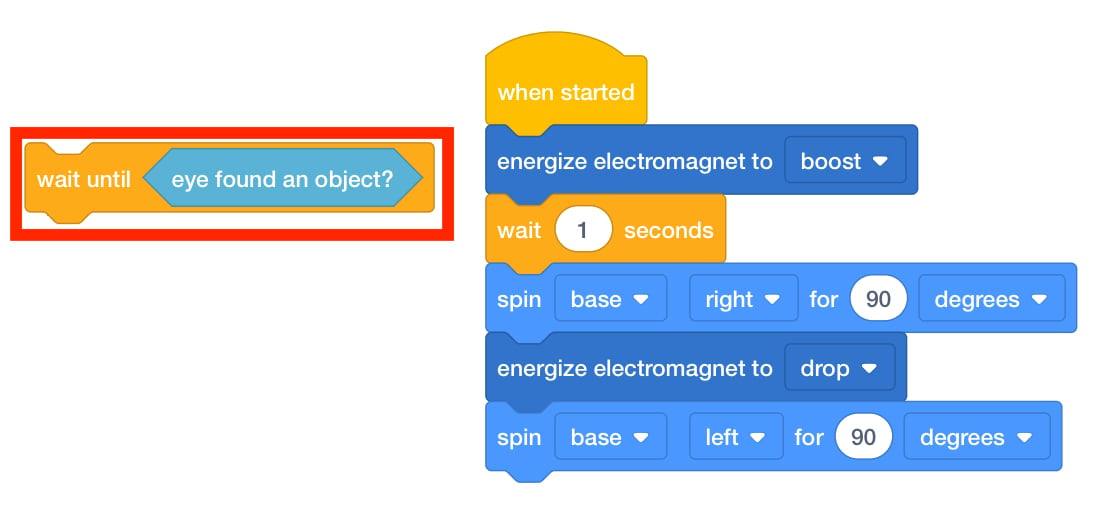
أضف <كائن تم العثور عليه بالعين> إلى [انتظر حتى] - اسأل الطلاب أين يريدون من مستشعر العين التحقق من وجود جسم ما؟ اسحب كتلة [انتظر حتى] إلى بداية المشروع.
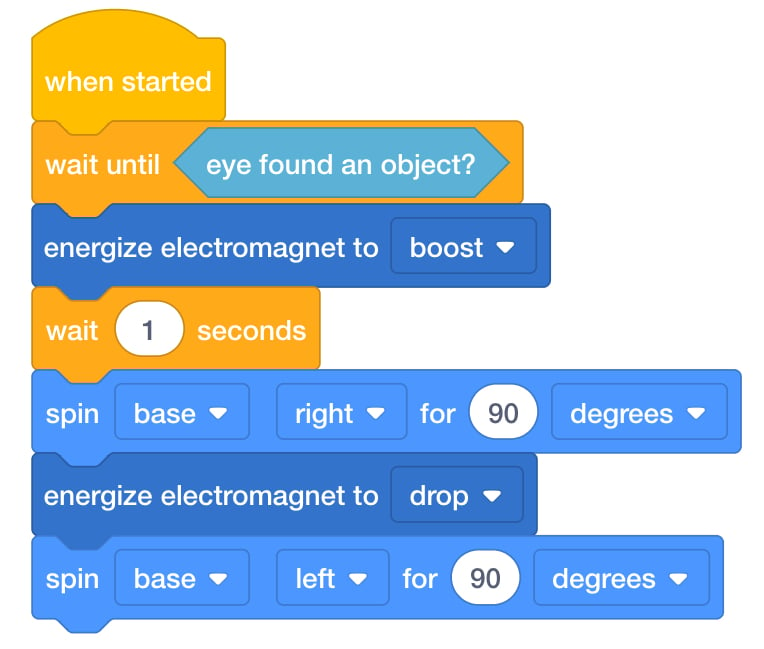
حل الجزء الأول من المختبر 4 - اطلب من الطلاب وضع قرص على المغناطيس الكهربائي وبدء المشروع ورؤية كيفية تحرك ذراع الروبوت الخاصة بهم. ينبغي عليهم البدء بالمشروع بقرص متصل بالمغناطيس الكهربائي. إذا واجهوا أي مشاكل أثناء استخدام مستشعر العين، فاطلب منهم اتباع هذه الخطوات مرة أخرى. إذا لزم الأمر, انظر شرط بدء مشروع في VEXcode GO, ونموذج للطلاب الخطوات في ذلك مقال لبدء المشروع.
- تسهيلتسهيل المحادثات حول سير المشروع أثناء اختبار الطلاب لأكوادهم. استخدم الحل المقدم
في عرض الشرائح الخاص بالمختبر 4 للتحقق من مشاريعهم أثناء التنقل.
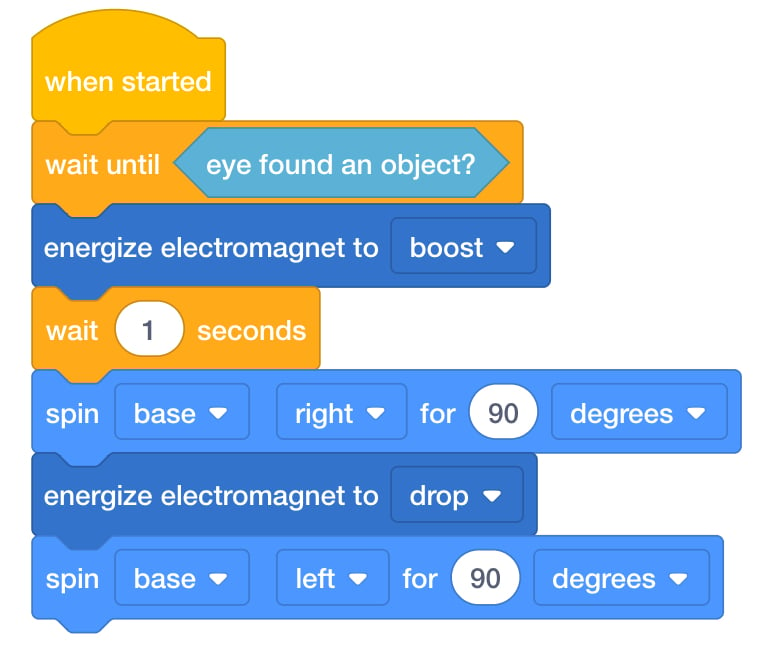
حل الجزء الأول من المختبر 4 اطرح عليهم بعض الأسئلة التالية لإثارة المناقشة.
- بأسلوبك الخاص، كيف يمكنك شرح ما هو الشرط البولياني؟
- ما رأيك سيحدث إذا نقلنا كتلة [انتظر حتى] إلى جزء مختلف من المشروع؟ كيف سيتغير تدفق المشروع؟
- إذا كنت تريد نقل قرص ثاني في نهاية المشروع، ما هي الكتل الأخرى التي ستحتاج إلى إضافتها؟
- كيف يشبه هذا المشروع أو يختلف عن المشروع الذي قمت به في المختبر 3؟
- تذكيرتذكير المجموعات بطرح الأسئلة إذا شعروا بالارتباك. لن يتم تنفيذ كل محاولة بشكل
صحيح. في كل مرة يقومون فيها بتشغيل المشروع، يجب على الطلاب تحديد الخطأ الذي حدث والتفكير في أفكار حول
كيفية إصلاحه. من المتوقع التجربة والخطأ.
إذا كان الطلاب يشعرون بالإحباط ويحتاجون إلى مزيد من المساعدة، اطلب منهم تكرار هدف المشروع لك.
- اسألاسأل الطلاب عن الأجهزة التي يعرفونها والتي قد تستخدم مستشعر العين؟ (روبوت فراغ،
أجراس أبواب إلكترونية)
إذا واجهوا صعوبة في إعداد قائمة، اطلب منهم إعداد قائمة بالأجهزة التي يرغبون في الحصول على مستشعر العين لها.
- على سبيل المثال: أريد جهاز استشعار للعين على الباب الخلفي الخاص بي بحيث في كل مرة يريد فيها الكلب الخروج، يخبرنا جهاز استشعار العين أن الكلب موجود عند الباب.
مناقشة جماعية & استراحة منتصف اللعب
بمجرد أن تقوم كل مجموعة بإنشاء مشروع باستخدام مستشعر العين والكتلة [انتظر حتى]، يجتمعون معًا لإجراء محادثة .
دعونا نتحدث عن تدفق المشروع باستخدام كتلة [انتظر حتى].
- لماذا كان من المهم وضع كتلة [انتظر حتى] في بداية المشروع؟
- ماذا سيحدث لتدفق مشروعنا إذا كانت كتلة [انتظر حتى] في مكان مختلف؟
- هل سيظل ذراع الروبوت الخاص بنا يعمل بالطريقة التي نريدها؟
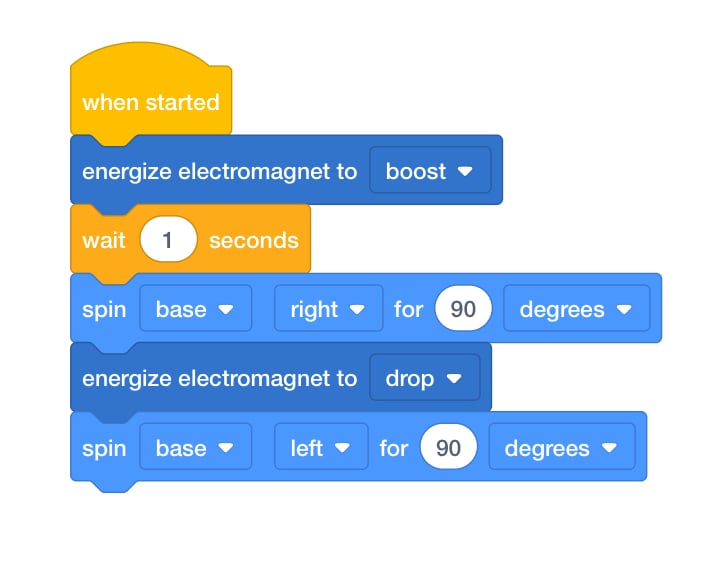
الجزء الثاني - خطوة بخطوة
- تعليماتأرشد الطلاب إلى أنهم سوف يكررون مشروعهم لجعل ذراع الروبوت تنتظر حتى يتم اكتشاف
القرص، ورفع القرص، وتحريك القرص إلى جزء آخر من المربع، وإسقاط القرص، والعودة إلى موقع البداية. شاهد
الفيديو أدناه لترى كيف استطاع الذراع الروبوتي تحريك القرص بنجاح من خلال استشعار القرص أولاً ثم رفعه لنقله
إلى مكان آخر باستخدام المغناطيس الكهربائي.
ملف الفيديو
- نموذجنموذج للطلاب حول كيفية تغيير كتلة [Spin for] للتحكم في محرك الذراع.
-
يجب على الطلاب فتح مشروعهم مختبر 4 الجزء 2 وإعادة تسميته مختبر 4 الجزء 2. قبل بداية، تأكد من أن الطلاب لديهمتوصيل أجهزتهم إلى ذراعهم الآلية (محورين) وأن تم تكوين ذراع الروبوت.

إعادة تسمية المشروع - اسحب الكتلة [Spin for] إلى مساحة العمل. اسأل الطلاب إذا كانوا يتذكرون كيفية التغيير من "القاعدة" إلى "الذراع".
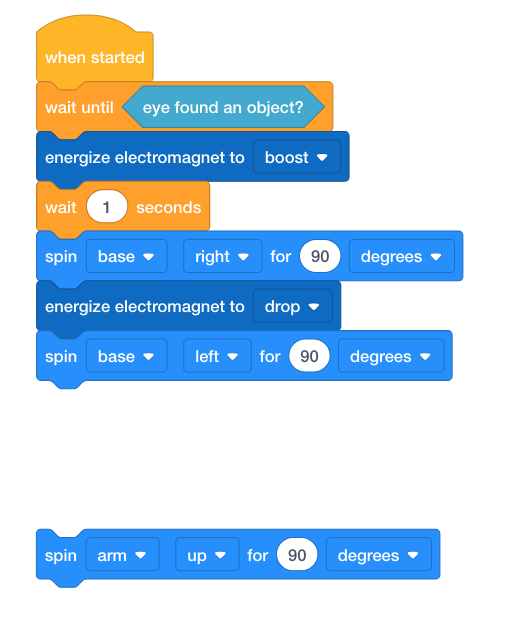
أضف [Spin for] إلى مساحة العمل - شاهد الرسوم المتحركة في عرض الشرائح للصور في المختبر 4 واسأل الطلاب عن المكان الذي نحتاج فيه إلى كتل [Spin for] إضافية لتحريك الذراع بالطريقة الموضحة.
- يمكن للطلاب استخدامها كتل التعليق لتذكير أنفسهم بما في كل خطوة من خطوات العملية هي. اشرح أن التعليقات مخصصة للمبرمج فقط، وليس للروبوت؛ وبالتالي فإنها لن تؤثر على سير المشروع.

[تعليق] كتلة - نموذج سحب كتلة تعليق إلى مساحة العمل وكتابة إحدى الخطوات في الكتلة.
- انتظر حتى يتم اكتشاف القرص
- ارفع القرص
- نقل القرص إلى جزء آخر من البلاط
- أسقط القرص
- العودة إلى موقع البداية
- اشرح أن التعليقات مخصصة للمبرمج فقط، وليس للروبوت؛ وبالتالي فإنها لن تؤثر على سير المشروع.
[تعليق] تمت إضافة كتلة - اطلب من الطلاب وضع قرص على المغناطيس الكهربائي وبدء المشروع ورؤية كيفية تحرك ذراع الروبوت الخاصة بهم. يجب أن يبدأوا المشروع بقرص متصل بالمغناطيس الكهربائي. إذا لزم الأمر, انظر شرط ابدأ مشروعًا في VEXcode GO, ونموذج للطلاب الخطوات في هذه المقالة لبدء المشروع.
-
- تسهيلتسهيل المحادثات حول تدفق المشروع عندما يبدأ الطلاب في تكرار مشاريعهم.

يجب أن يكون ذراع الروبوت الخاص بك... اطرح أسئلة مثل:
- ما رأيك سيحدث إذا تمت إضافة كتلة [انتظر حتى] بعد تشغيل المحرك الذراعي؟ كيف سيؤثر ذلك على سير مشروعك؟
- لماذا تعتقد أننا نريد أن يعود ذراع الروبوت إلى موقع البداية بعد إسقاطه من القرص؟
- كيف يمكن لكتل التعليقات أن تساعدك على فهم تدفق مشروعك أثناء كتابة التعليمات البرمجية؟
- إذا كنت تريد نقل القرص الثاني إلى موقع جديد تمامًا، ما هي الكتل الأخرى التي ستحتاج إلى إضافتها؟
- تذكيرتذكير المجموعات بطرح الأسئلة إذا شعروا بالارتباك. لن يتم تنفيذ كل محاولة بشكل
صحيح. في كل مرة يقومون فيها بتشغيل المشروع، يجب على الطلاب تحديد الخطأ الذي حدث والتفكير في أفكار حول
كيفية إصلاحه. من المتوقع التجربة والخطأ.
إذا كان الطلاب يشعرون بالإحباط ويحتاجون إلى مزيد من المساعدة، اطلب منهم تكرار هدف المشروع لك.
ينبغي عليهم استخدام مشروع المختبر الجزء 1 الخاص بهم كدليل.
الحل Lab 4 الجزء 2 متاح أيضًا للرجوع إليه من قبل المعلم.

مختبر 4 الجزء 2 الحل - اسألاسأل الطلاب عن المهام الأخرى التي قد يتمكنون من إكمالها باستخدام كل من المحرك الذراعي والمحرك الأساسي؟ ماذا عن الذراع الروبوتية الأكبر؟