
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนสร้างโครงการโดยให้แขนหุ่นยนต์รอจนกว่าจะตรวจพบดิสก์
(โดยใช้เซ็นเซอร์ตา) แล้วจึงเคลื่อนย้ายดิสก์โดยใช้แม่เหล็กไฟฟ้า
ชมวิดีโอด้านล่างเพื่อดูว่าแขนหุ่นยนต์สามารถเคลื่อนย้ายดิสก์ได้สำเร็จอย่างไร
โดยตรวจจับดิสก์ก่อนแล้วจึงเลื่อนไปทางขวาโดยใช้แม่เหล็กไฟฟ้า
ไฟล์วีดีโอ
- แบบจำลองที่แบบจำลองวิธีการสร้างโครงการโดยใช้บล็อก [รอจนกว่า] และเซ็นเซอร์ตา
ให้เด็กนักเรียนติดตามคุณบนจอฉายหรือผ่านสไลด์โชว์ Lab 4
- ก่อนเริ่มต้นตรวจสอบให้แน่ใจว่านักเรียนมี เชื่อมต่ออุปกรณ์ของพวกเขาแล้ว ไปยังแขนหุ่นยนต์ (2 แกน) และแขนหุ่นยนต์นั้นอยู่ กำหนดค่าแล้ว หากจำเป็น ให้จำลองขั้นตอนในบทความนี้กำหนดค่าแขนหุ่นยนต์ เพื่อแนะนำนักเรียนในกระบวนการกำหนดค่าหุ่นยนต์ของตนเอง แขน.
หมายเหตุ: เมื่อคุณเชื่อมต่อแขนหุ่นยนต์เข้ากับอุปกรณ์เป็นครั้งแรก ไจโรที่ติดตั้งอยู่ใน Brain อาจปรับเทียบ ทำให้แขนหุ่นยนต์เคลื่อนไหวเองชั่วขณะหนึ่ง นี่คือพฤติกรรมที่คาดไว้ อย่าสัมผัสแขนหุ่นยนต์ในขณะที่กำลังปรับเทียบ
- ให้เด็กนักเรียนเปิดโครงการ Lab 3 ส่วนที่ 2 ของตนเอง โครงการใหม่จะสร้างขึ้นจากโครงการนี้ เลือก “บันทึกเป็น” หรือ “บันทึกลงในอุปกรณ์ของคุณ” (ขึ้นอยู่กับเวอร์ชัน VEXcode GO ที่คุณใช้) และเปลี่ยนชื่อโครงการ Lab 4 ส่วนที่ 1.

เปลี่ยนชื่อโครงการ - หากมีนักเรียนคนใดที่ไม่ได้เข้าร่วม Lab 3 หรือไม่พบโครงการของตน ให้พวกเขาสร้างโซลูชัน Lab 3 ส่วนที่ 2 ขึ้นมาใหม่จากภาพสไลด์โชว์ Lab 4
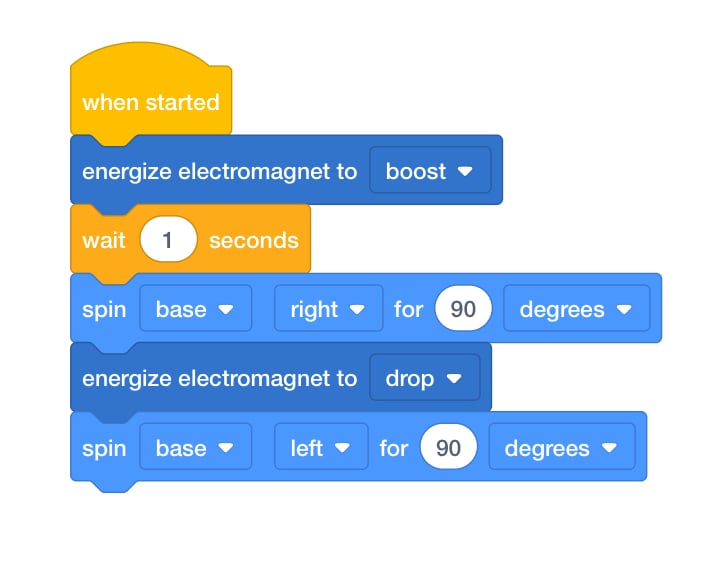
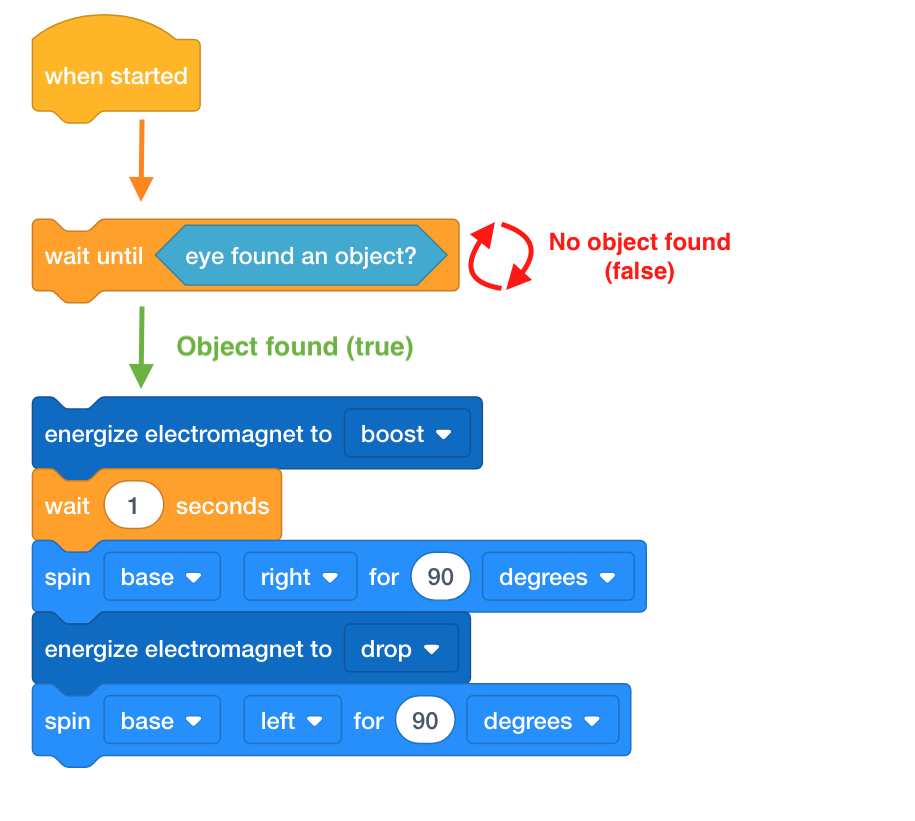
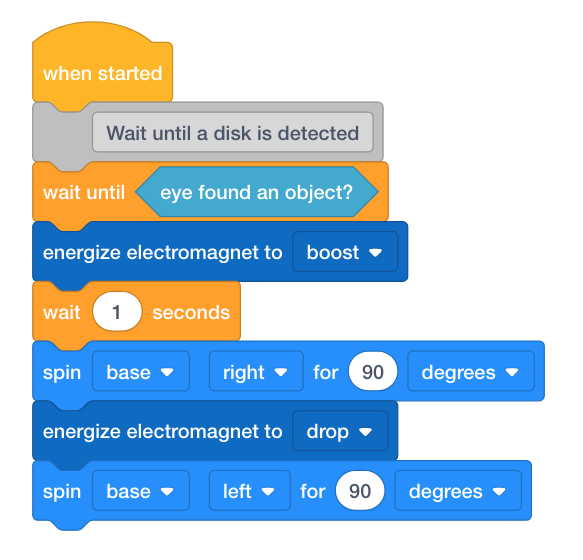
แล็บ 3 ส่วนที่ 2 โซลูชัน - ลากบล็อก [รอจนกว่า] เข้าไปในพื้นที่ทำงาน อธิบายว่าบล็อก [รอจนกว่า] ยอมรับเงื่อนไขบูลีน และจะหยุดการทำงานของโครงการจนกว่าบล็อกภายในจะรายงานเงื่อนไขว่าเป็น 'จริง'
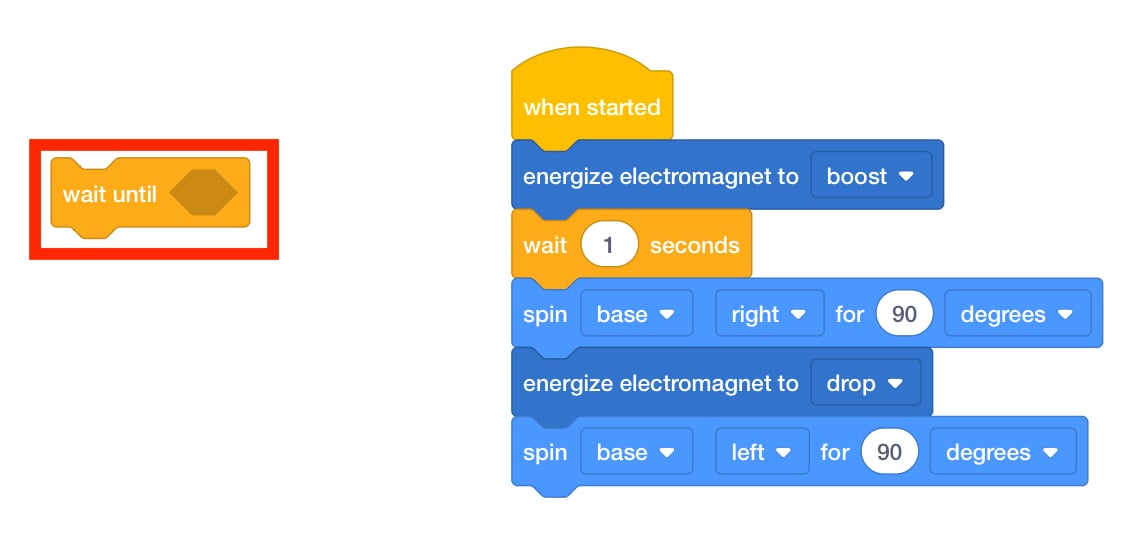
เพิ่มรอจนกว่าจะถึงบล็อค -
โครงการนี้จะใช้เซนเซอร์ตาเพื่อตรวจจับว่ามีวัตถุอยู่หรือไม่ เพื่อที่จะหยิบมันขึ้นมา ข้อมูลเซ็นเซอร์ตาเป็นเงื่อนไขบูลีนที่เรากำลังรอ
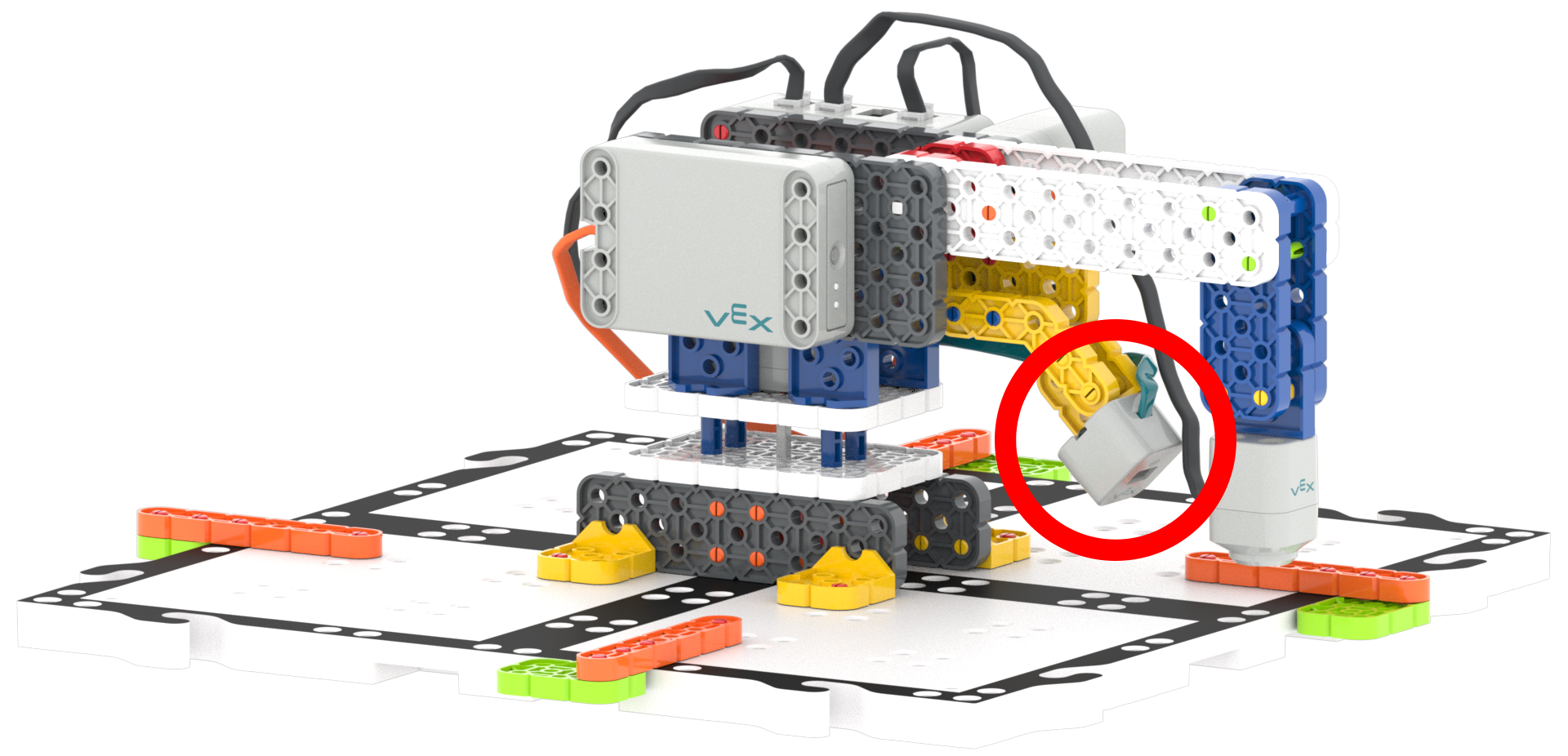
เซ็นเซอร์ตา -
ค้นหาบล็อก <Eye found object> ในกล่องเครื่องมือภายใต้ 'การตรวจจับ' อธิบายว่า <Eye found object> คือบล็อกบูลีนที่จะรายงานว่าเป็น True หรือ False ดังนั้นจึงสามารถใช้กับบล็อก [Wait until] ได้
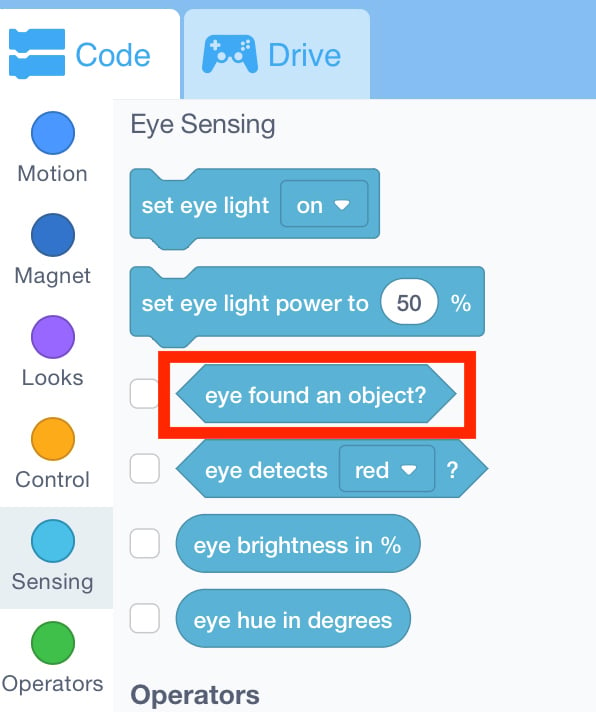
หมวดการรับรู้ทางสายตา - ลาก <Eye found object> เข้าไปในบล็อก [รอจนกว่า]
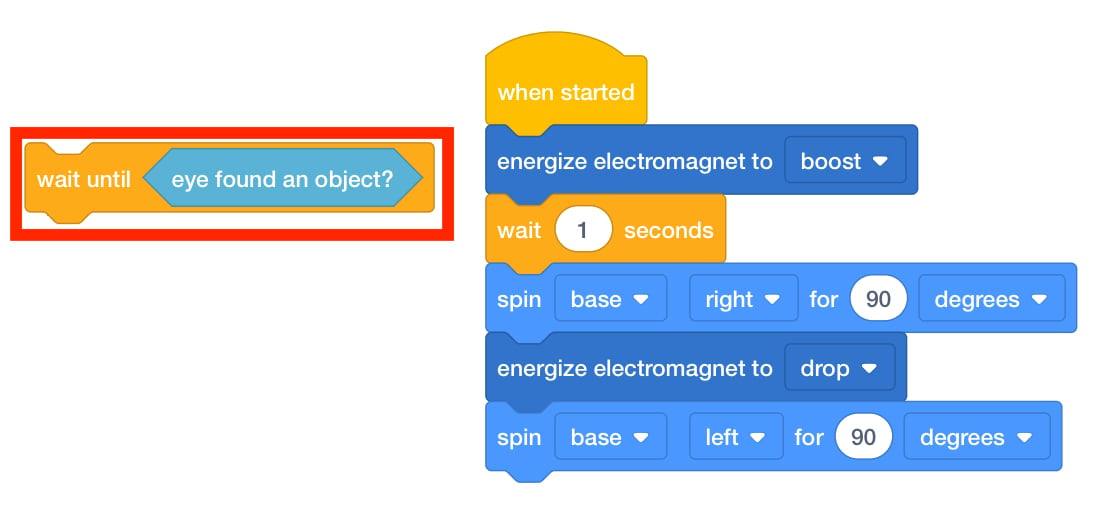
เพิ่ม <Eye Found Object> เป็น [รอจนกว่า] - ถามนักเรียนว่าพวกเขาต้องการให้เซนเซอร์ตาตรวจสอบวัตถุที่ ลากบล็อค [รอจนกว่า] ไปที่จุดเริ่มต้นของโครงการ
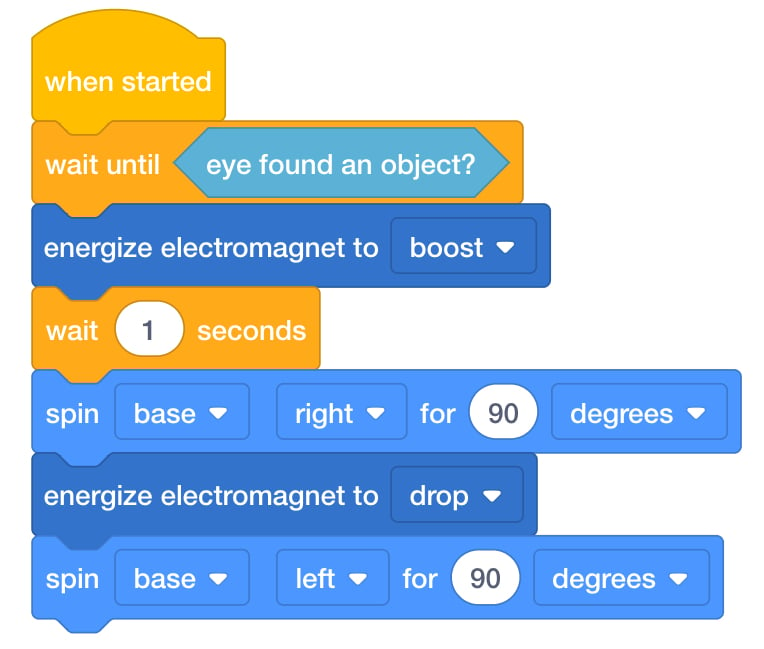
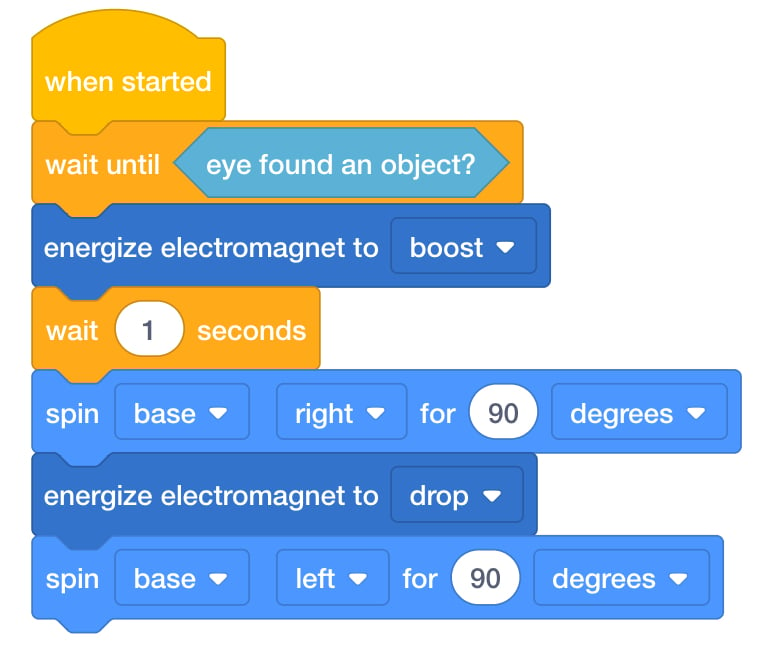
แล็บ 4 ส่วนที่ 1 โซลูชัน - ให้เด็กนักเรียนวางดิสก์ไว้บนแม่เหล็กไฟฟ้าและเริ่มโครงการและดูว่าแขนหุ่นยนต์ของพวกเขาเคลื่อนไหวอย่างไร พวกเขาควรเริ่มโครงการด้วยดิสก์ที่แนบกับแม่เหล็กไฟฟ้า หากพวกเขาประสบปัญหาในการใช้เซ็นเซอร์ตา ให้ทำตามขั้นตอนเหล่านี้อีกครั้ง หากจำเป็น โปรดดูบทความ กำลังเริ่มโครงการใน VEXcode GO, และเป็นแบบอย่างแก่นักเรียนในขั้นตอนนี้ บทความเพื่อเริ่มโครงการ.
-
อำนวยความสะดวกอำนวยความสะดวกในการสนทนาเกี่ยวกับกระแสของโครงการในขณะที่นักเรียนทดสอบโค้ดของพวกเขา
ใช้โซลูชันที่ให้ไว้ใน Lab 4 Slideshow เพื่อตรวจสอบโครงการต่างๆ ขณะที่คุณเผยแพร่
แล็บ 4 ส่วนที่ 1 โซลูชัน ถามคำถามต่อไปนี้กับพวกเขาเพื่อกระตุ้นการสนทนา
- คุณจะอธิบายด้วยคำพูดของคุณเองว่าเงื่อนไขบูลีนคืออะไรได้อย่างไร?
- คุณคิดว่าจะเกิดอะไรขึ้นถ้าเราย้ายบล็อก [รอจนกว่า] ไปยังส่วนอื่นของโปรเจ็กต์ การไหลของโครงการจะเปลี่ยนไปอย่างไร?
- หากคุณต้องการย้ายดิสก์ที่สองเมื่อสิ้นสุดโครงการ คุณจะต้องเพิ่มบล็อคอื่นใดอีกหรือไม่
- โครงการนี้มีความคล้ายหรือแตกต่างจากโครงการที่คุณสร้างใน Lab 3 อย่างไร
- เตือนเตือนกลุ่มให้ถามคำถามหากเกิดความสับสน ไม่ใช่ว่าทุกความพยายามจะทำงานได้อย่างถูกต้อง
ทุกครั้งที่ดำเนินโครงการ นักเรียนควรระบุสิ่งที่ผิดพลาดและระดมความคิดเพื่อหาแนวทางแก้ไข
คาดว่าจะต้องมีการลองผิดลองถูก
หากนักเรียนรู้สึกหงุดหงิดและต้องการความช่วยเหลือเพิ่มเติม ให้พวกเขาย้ำเป้าหมายของโครงการให้คุณทราบอีกครั้ง
- ถามถามนักเรียนว่าพวกเขารู้จักอุปกรณ์ใดที่อาจใช้เซ็นเซอร์ตา (หุ่นยนต์ดูดฝุ่น,
กริ่งประตูไฟฟ้า)
หากพวกเขาพบว่าการจัดทำรายการเป็นเรื่องยาก ให้พวกเขาจัดทำรายการอุปกรณ์ที่พวกเขาต้องการให้ติดตั้งเซ็นเซอร์ตา
- ตัวอย่าง: ฉันอยากได้เซ็นเซอร์ตรวจจับสายตาที่ประตูหลัง ดังนั้นทุกครั้งที่สุนัขต้องการออกไปข้างนอก เซ็นเซอร์ตรวจจับสายตาก็จะบอกเราว่าสุนัขอยู่ที่ประตู
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
ทันทีที่กลุ่ม แต่ละกลุ่มสร้างโครงการโดยใช้เซ็นเซอร์ตาและบล็อก [รอจนกว่า]มารวมตัวกันเพื่อสนทนาสั้นๆ
มาพูดถึงขั้นตอนการไหลของโครงการด้วยบล็อค [รอจนกว่า] กันดีกว่า
- เหตุใดการวางบล็อก [รอจนกว่าจะ] ไว้ที่จุดเริ่มต้นของโครงการจึงมีความสำคัญ
- จะเกิดอะไรขึ้นกับโฟลว์ของโครงการของเราหากบล็อค [รอจนกว่า] อยู่ในตำแหน่งอื่น?
- แขนหุ่นยนต์ของเรายังจะทำงานตามที่เราต้องการได้หรือไม่?
ตอนที่ 2 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนทำซ้ำในโปรเจ็กต์ของตนเพื่อให้แขนหุ่นยนต์รอจนกว่าจะตรวจพบดิสก์
จากนั้นจึงยกดิสก์ขึ้น ย้ายดิสก์ไปยังส่วนอื่นของไทล์ วางดิสก์ลง แล้วกลับมาที่ตำแหน่งเริ่มต้น
ชมวิดีโอด้านล่างเพื่อดูว่าแขนหุ่นยนต์สามารถเคลื่อนย้ายดิสก์ได้สำเร็จอย่างไร โดยตรวจจับดิสก์ก่อน
จากนั้นจึงยกดิสก์ขึ้นเพื่อเคลื่อนย้ายไปยังตำแหน่งอื่นโดยใช้แม่เหล็กไฟฟ้า
ไฟล์วีดีโอ
- แบบจำลอง แบบจำลองสำหรับนักเรียนเกี่ยวกับวิธีการเปลี่ยนบล็อก [หมุนสำหรับ]
เพื่อควบคุมมอเตอร์แขน
-
นักเรียนควรเปิดโครงการ ห้องปฏิบัติการที่ 4 ส่วน 1 ของตนเองและเปลี่ยนชื่อเป็น ห้องปฏิบัติการที่ 4 ส่วน 2 ก่อนเริ่มต้นตรวจสอบให้แน่ใจว่านักเรียนมี เชื่อมต่ออุปกรณ์ของพวกเขาแล้ว ไปยังแขนหุ่นยนต์ (2 แกน) และนั่นก็คือ แขนหุ่นยนต์ได้รับการกำหนดค่าแล้ว.

เปลี่ยนชื่อโครงการ - ลากบล็อก [หมุน สำหรับ] เข้าไปในพื้นที่ทำงาน ถามนักเรียนว่าพวกเขาจำวิธีเปลี่ยนจาก 'ฐาน' เป็น 'แขน' ได้หรือไม่
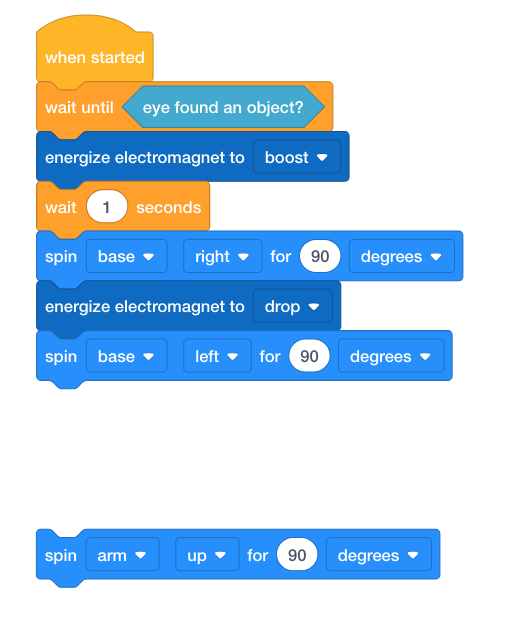
เพิ่ม [หมุนสำหรับ] ลงในพื้นที่ทำงาน - ชมแอนิเมชันในภาพสไลด์โชว์ Lab 4 และถามนักเรียนว่าต้องมีบล็อก [หมุน สำหรับ] เพิ่มเติมที่ใดเพื่อขยับแขนในลักษณะที่แสดง
- นักเรียนก็สามารถใช้ได้ บล็อกความคิดเห็น เพื่อเตือนตัวเองว่าแต่ละขั้นตอนของอะไร กระบวนการคือ. อธิบายว่าความคิดเห็นมีไว้สำหรับผู้เขียนโค้ดเท่านั้น ไม่ใช่สำหรับหุ่นยนต์ ดังนั้นความคิดเห็นจะไม่ส่งผลกระทบต่อการทำงานของโครงการ

[ความคิดเห็น] บล็อค - สร้างแบบจำลองการลากบล็อกความคิดเห็นเข้าไปในเวิร์กสเปซ และพิมพ์ขั้นตอนใดขั้นตอนหนึ่งลงในบล็อกนั้น
- รอจนกว่าจะตรวจพบดิสก์
- ยกดิสก์ขึ้น
- ย้ายดิสก์ไปยังส่วนอื่นของไทล์
- วางดิสก์
- กลับสู่จุดเริ่มต้น
- อธิบายว่าความคิดเห็นมีไว้สำหรับผู้เขียนโค้ดเท่านั้น ไม่ใช่สำหรับหุ่นยนต์ ดังนั้นความคิดเห็นจะไม่ส่งผลกระทบต่อการทำงานของโครงการ
[ความคิดเห็น] เพิ่มบล็อค - ให้เด็กนักเรียนวางดิสก์ไว้บนแม่เหล็กไฟฟ้าและเริ่มโครงการและดูว่าแขนหุ่นยนต์ของพวกเขาเคลื่อนไหวอย่างไร พวกเขาควรเริ่มโปรเจ็กต์ด้วยดิสก์ที่ต่ออยู่กับแม่เหล็กไฟฟ้า หากจำเป็น โปรดดูที่ บทความเริ่มโครงการใน VEXcode GO,และเป็นแบบอย่างแก่นักศึกษาขั้นตอนในบทความนี้ เพื่อเริ่มโครงการ
-
-
อำนวยความสะดวกอำนวยความสะดวกในการสนทนาเกี่ยวกับกระแสของโครงการในขณะที่นักเรียนเริ่มทำซ้ำในโครงการของพวกเขา

แขนหุ่นยนต์ของคุณควร... ถามคำถามเช่น:
- คุณคิดว่าจะเกิดอะไรขึ้นถ้าเพิ่มบล็อก [รอจนกว่า] หลังจากที่ Arm Motor ถูกหมุนขึ้นมา? การเปลี่ยนแปลงนั้นจะเปลี่ยนกระแสของโครงการของคุณอย่างไร
- เหตุใดคุณจึงคิดว่าเราต้องการให้แขนหุ่นยนต์กลับไปยังตำแหน่งเริ่มต้นหลังจากวางแผ่นดิสก์ลง?
- บล็อกความคิดเห็นช่วยให้คุณเข้าใจการทำงานของโปรเจ็กต์ขณะที่คุณกำลังเขียนโค้ดได้อย่างไร
- หากคุณต้องการย้ายดิสก์ที่สองไปยังตำแหน่งใหม่ คุณจะต้องเพิ่มบล็อคอื่น ๆ อะไรบ้าง?
- เตือนเตือนกลุ่มให้ถามคำถามหากเกิดความสับสน ไม่ใช่ว่าทุกความพยายามจะทำงานได้อย่างถูกต้อง
ทุกครั้งที่ดำเนินโครงการ นักเรียนควรระบุสิ่งที่ผิดพลาดและระดมความคิดเพื่อหาแนวทางแก้ไข
คาดว่าจะต้องมีการลองผิดลองถูก
หากนักเรียนรู้สึกหงุดหงิดและต้องการความช่วยเหลือเพิ่มเติม ให้พวกเขาย้ำเป้าหมายของโครงการให้คุณทราบอีกครั้ง
พวกเขาควรใช้โครงการ Lab 4 ตอนที่ 1 ของตนเป็นแนวทาง
โซลูชัน Lab 4 ส่วนที่ 2 นั้นมีไว้เพื่อใช้เป็นข้อมูลอ้างอิงสำหรับครูด้วยเช่นกัน

แล็บ 4 ส่วนที่ 2 โซลูชัน - ถามถามนักเรียนว่ามีงานอื่นๆ อะไรอีกบ้างที่พวกเขาสามารถทำสำเร็จได้โดยใช้ทั้งมอเตอร์แขนและมอเตอร์ฐาน แล้วแขนหุ่นยนต์ที่ใหญ่กว่าล่ะ?