
Jugar
Parte 1 - Paso a paso
- InstruirIndique a los estudiantes que van a crear un proyecto en el que el brazo
robótico espera hasta que se detecte un disco (usando el sensor ocular) y luego mueve el disco usando el
electroimán. Mire el video a continuación para ver cómo el brazo robótico puede mover el disco con éxito,
primero detectándolo y luego deslizándolo hacia la derecha usando el electroimán.
Archivo de vídeo
- ModeloModelo sobre cómo construir un proyecto utilizando el bloque [Esperar hasta] y el
sensor ocular. Haga que los estudiantes lo sigan en una pantalla proyectada o a través de la presentación
de diapositivas del Laboratorio 4.
- Antes de comenzar, asegúrese de que los estudiantes tengan conectó su dispositivo a su brazo robótico (2 ejes) y que el brazo robótico esté configurado. Si es necesario, modele los pasos de este artículoConfigurar un brazo robótico Guiar a los estudiantes en el proceso de Configuración de su Robot. Brazo.
Nota: Cuando conecta por primera vez su brazo robótico a su dispositivo, el giroscopio integrado en el cerebro puede calibrarse, lo que hace que el brazo robótico se mueva por sí solo por un momento. Este es un comportamiento esperado, no toque el brazo robótico mientras se está calibrando.
- Pida a los estudiantes que abran su proyecto Laboratorio 3 Parte 2. El nuevo proyecto se basará en este proyecto. Seleccione “Guardar como” o “Guardar en su dispositivo” (según la versión de VEXcode GO que esté usando) y cambie el nombre del proyecto Laboratorio 4 Parte 1.

Cambiar el nombre del proyecto - Si hay estudiantes que no estuvieron presentes en el Laboratorio 3 o no pueden encontrar su proyecto, pídales que recreen la solución del Laboratorio 3 Parte 2 de la Presentación de imágenes del Laboratorio 4.
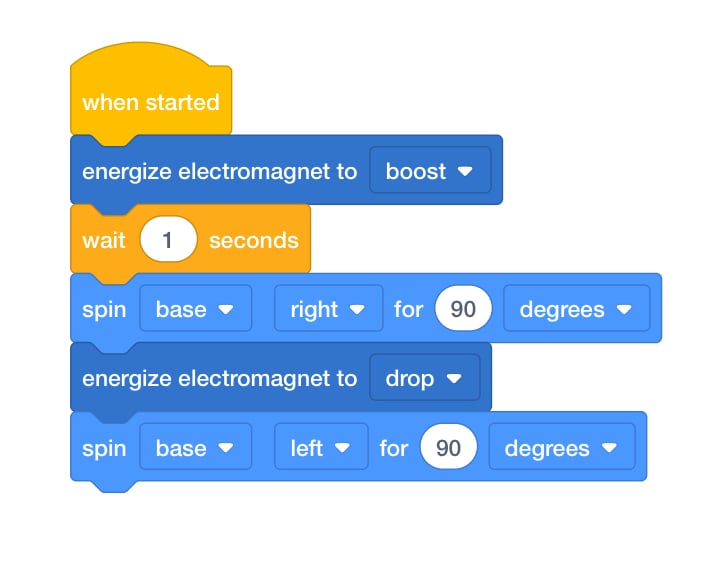
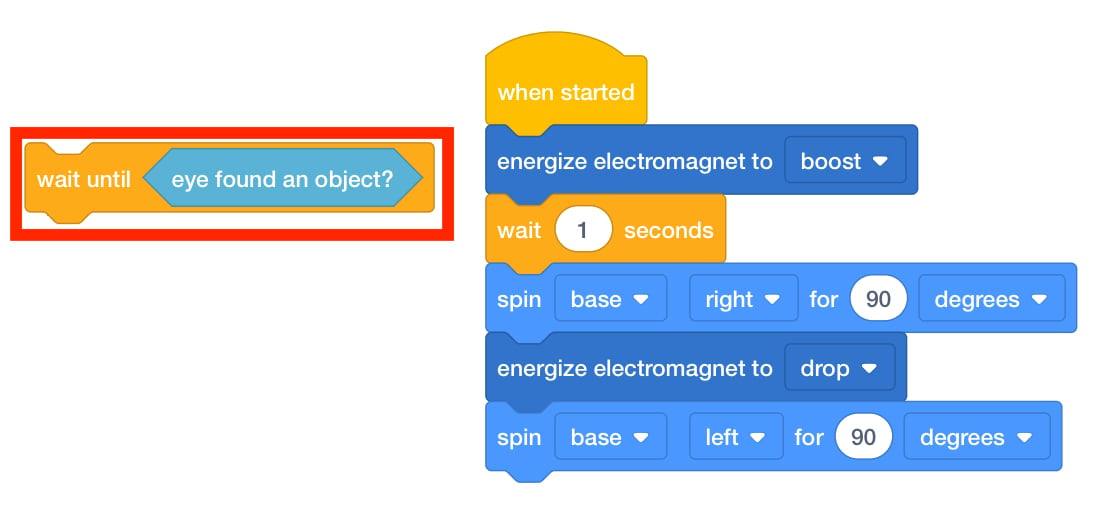
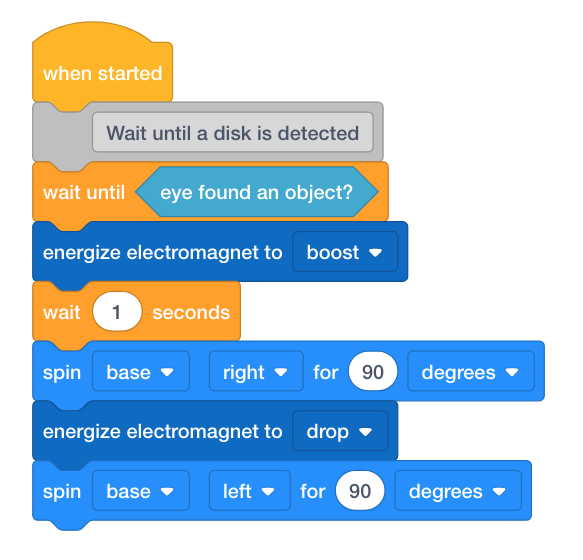
Laboratorio 3 Parte 2 Solución - Arrastre el bloque [Esperar hasta] al espacio de trabajo. Explique que el bloque [Esperar hasta] acepta condiciones booleanas y detendrá la ejecución del proyecto hasta que el bloque interno informe una condición como "Verdadero".
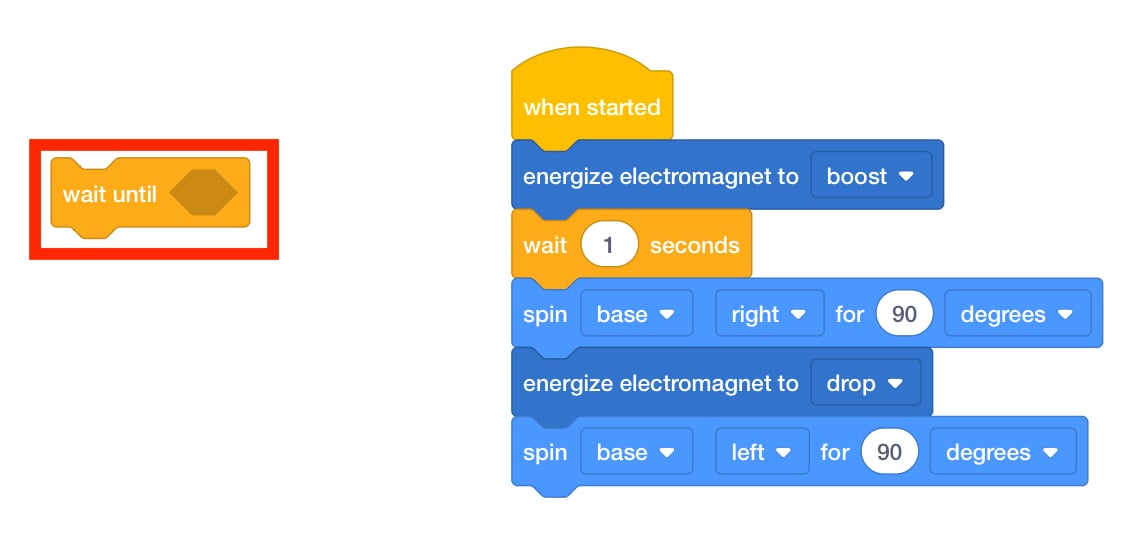
Agregar Esperar hasta el bloque -
Este proyecto utilizará el sensor ocular para detectar si hay un objeto presente y poder recogerlo. Los datos del sensor ocular son la condición booleana que estamos esperando.
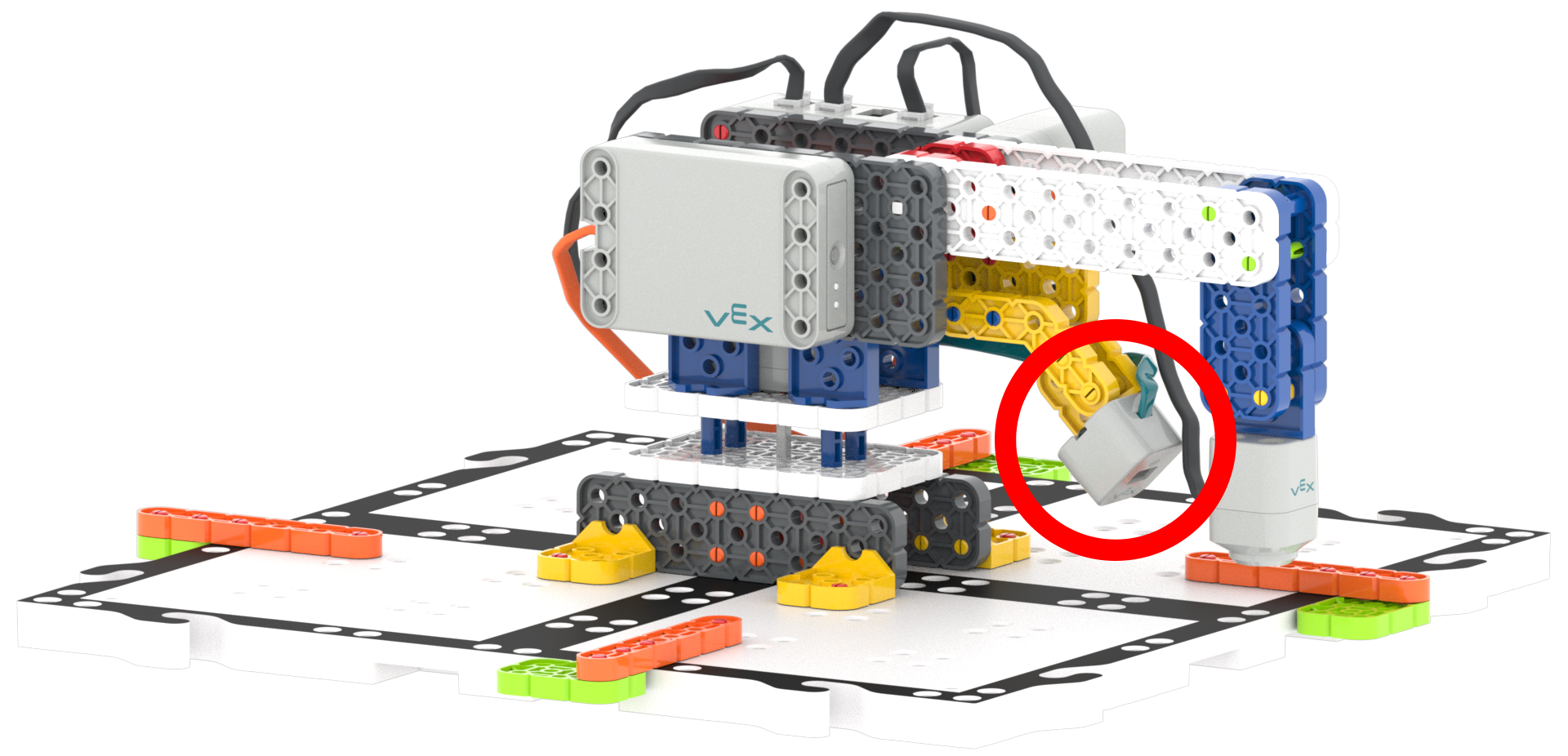
Sensor ocular -
Busque el bloque <Eye found object> en la Caja de herramientas en “Detección”. Explique que el <Eye found object> es un bloque booleano que informará Verdadero o Falso, por lo que se puede utilizar con el bloque [Esperar hasta].
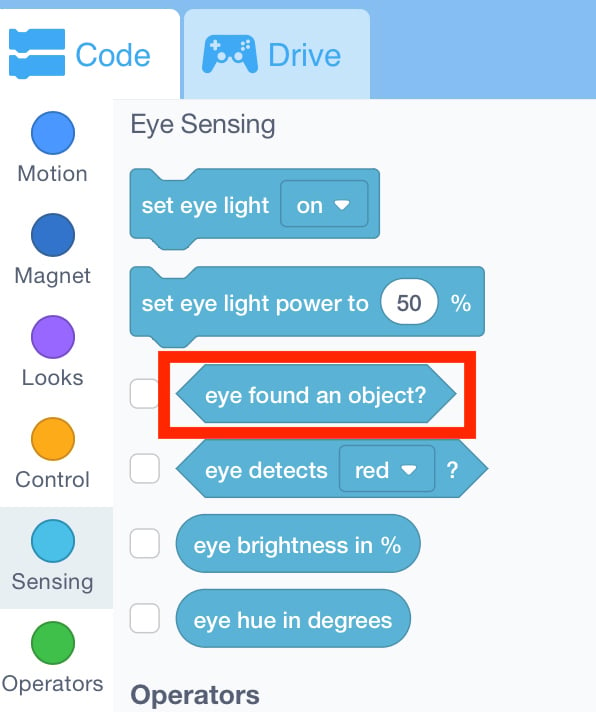
Categoría de detección ocular - Arrastre el <Eye found object> al bloque [Esperar hasta].
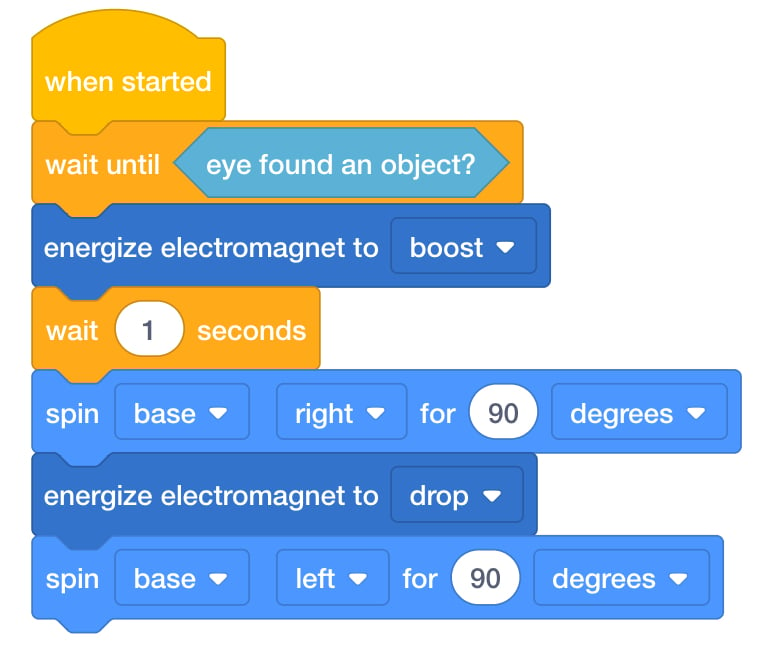
Agrega <Eye Found Object> a [Esperar hasta] - Pregúnteles a los estudiantes quieren que el sensor ocular busque un objeto. Arrastre el bloque [Esperar hasta] hasta el inicio del proyecto.
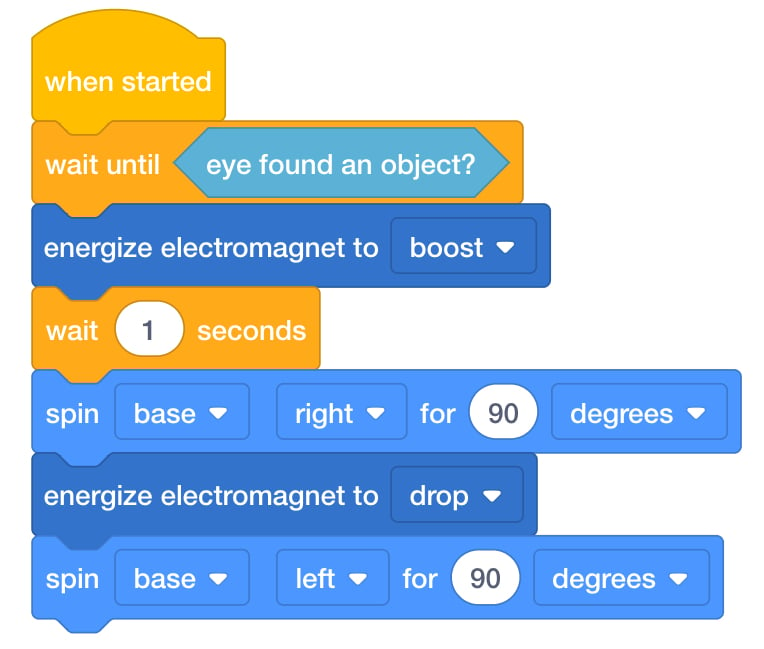
Laboratorio 4 Parte 1 Solución - Haga que los estudiantes coloquen un disco en el electroimán y comiencen el proyecto y vean cómo se mueve su brazo robótico. Deberían comenzar el proyecto con un disco conectado al electroimán. Si tienen algún problema al utilizar el sensor ocular, pídales que sigan estos pasos nuevamente. Si necesario, ver el artículo Iniciar un proyecto en VEXcode GO, y modele para los estudiantes los pasos en este artículo para iniciar un proyecto.
- FacilitarFacilitar conversaciones sobre el flujo del proyecto mientras los estudiantes
prueban su código. Utilice la solución proporcionada en la presentación de diapositivas del Laboratorio 4
para verificar sus proyectos a medida que circula.
Laboratorio 4 Parte 1 Solución Pregúnteles algunas de las siguientes preguntas para iniciar un debate.
- En tus propias palabras, ¿cómo explicarías qué es una condición booleana?
- ¿Qué crees que pasaría si moviéramos el bloque [Esperar hasta] a una parte diferente del proyecto? ¿Cómo cambiaría el flujo del proyecto?
- Si quisieras mover un segundo disco al final del proyecto, ¿qué otros bloques necesitarías agregar?
- ¿En qué se parece o se diferencia este proyecto del proyecto que realizaste en el Laboratorio 3?
- RecordarRecuerde a los grupos que hagan preguntas si están confundidos. No todos los
intentos se ejecutarán correctamente. Cada vez que ejecuten el proyecto, los estudiantes deben identificar
qué salió mal y pensar en ideas para solucionarlo. Se espera que haya prueba y error.
Si los estudiantes están frustrados y necesitan más ayuda, pídales que le reiteren el objetivo del proyecto.
- PreguntaPregunte a los estudiantes qué dispositivos conocen que podrían utilizar un
sensor ocular. (Robot aspirador, timbres electrónicos)
Si les resulta difícil elaborar una lista, pídales que elaboren una lista de dispositivos para los cuales les gustaría tener un sensor ocular.
- Ejemplo: quisiera un sensor ocular en mi puerta trasera para que cada vez que el perro quisiera salir, el sensor ocular nos dijera que el perro está en la puerta.
Pausa a mitad de juego & Discusión en grupo
Tan pronto como cada grupo haya creado un proyecto utilizando el sensor ocular y el bloque [Esperar hasta], reúnanse para una conversación.
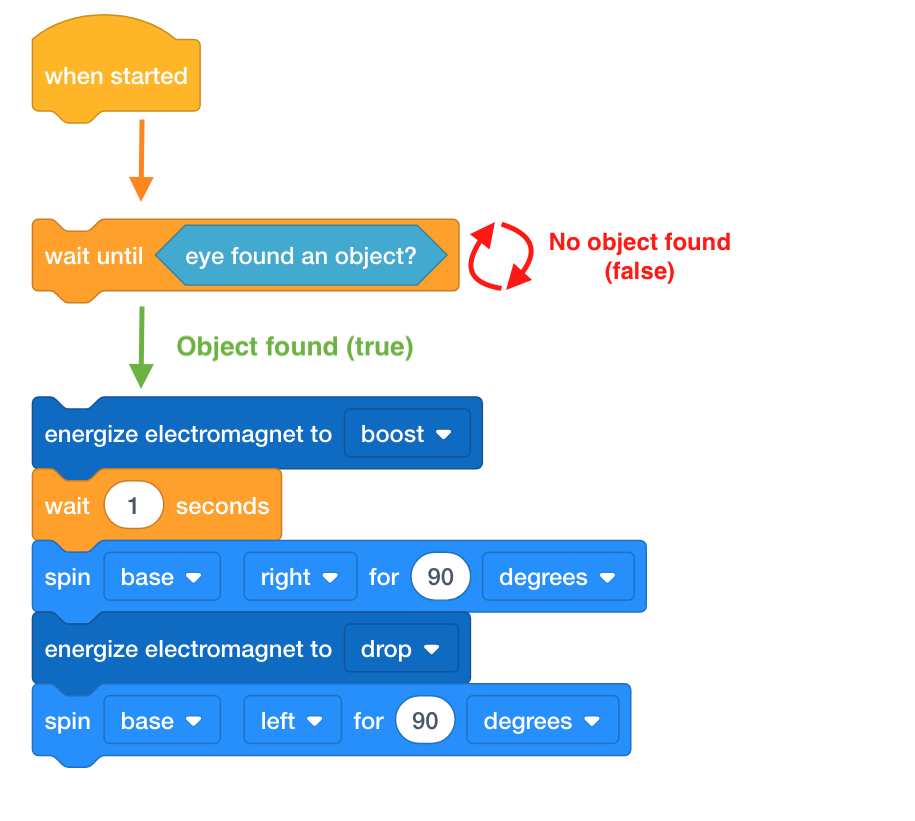
Hablemos del flujo del proyecto con el bloque [Esperar hasta].
- ¿Por qué era importante poner el bloque [Esperar hasta] al inicio del proyecto?
- ¿Qué pasaría con el flujo de nuestro proyecto si el bloque [Esperar hasta] estuviera en un lugar diferente?
- ¿Nuestro brazo robótico seguiría funcionando como queríamos?
Parte 2 - Paso a paso
- InstruirIndique a los estudiantes que van a iterar en su proyecto para hacer que el
brazo robótico espere hasta que se detecte un disco, levante el disco, lo mueva a otra parte del mosaico,
lo suelte y regrese a la ubicación inicial. Mire el video a continuación para ver cómo el brazo robótico
podría mover el disco con éxito, primero detectándolo y luego levantándolo para moverlo a otra ubicación
usando el electroimán.
Archivo de vídeo
- ModeloModelo para que los estudiantes aprendan a cambiar el bloque [Girar para] para
controlar el motor del brazo.
-
Los estudiantes deben abrir su proyecto Lab 4 Parte 1 y cambiarle el nombre a Lab 4 Parte 2. Antes de comenzar, asegúrese de que los estudiantes tenganconectó su dispositivo a su brazo robótico (2 ejes) y que el El brazo robótico está configurado.

Cambiar el nombre del proyecto - Arrastre el bloque [Girar para] al espacio de trabajo. Pregunte a los estudiantes si recuerdan cómo cambiar de "base" a "brazo".
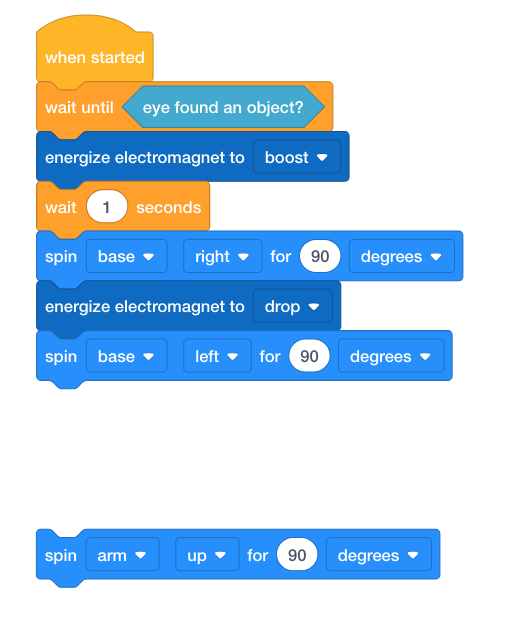
Agregar [Girar para] al espacio de trabajo - Mire la animación en la presentación de imágenes del Laboratorio 4 y pregunte a los estudiantes dónde se necesitan bloques [Girar para] adicionales para mover el brazo en la forma en que se muestra.
- Las estudiantes pueden usar bloques de comentarios para recordar lo que significa cada paso del el proceso es. Explique que los comentarios son sólo para el codificador, no para el robot; por lo tanto, no afectarán el flujo del proyecto.

[Comentario] bloque - Modelo arrastrando un bloque de comentarios al espacio de trabajo y escribiendo uno de los pasos en
el bloque.
- Espere hasta que se detecte un disco
- Levantar el disco
- Mueva el disco a otra parte del mosaico
- Soltar el disco
- Regresar al punto de partida
- Explique que los comentarios son sólo para el codificador, no para el robot; por lo tanto, no afectarán el flujo del proyecto.
[Comentario] bloque añadido - Haga que los estudiantes coloquen un disco en el electroimán y comiencen el proyecto y vean cómo se mueve su brazo robótico. Deberían iniciar el proyecto con un disco conectado al Electroimán. Si es necesario, consulte el artículo. Iniciar un proyecto en VEXcode GO, y modele para los estudiantes los pasos de este artículo. para iniciar un proyecto.
-
- FacilitarFacilitar conversaciones sobre el flujo del proyecto a medida que los
estudiantes comienzan a iterar en sus proyectos.

Su brazo robótico debería... Haga preguntas como:
- ¿Qué crees que pasaría si se agregara el bloque [Esperar hasta] después de que se activara el motor del brazo? ¿Cómo cambiaría eso el flujo de tu proyecto?
- ¿Por qué crees que queremos que el brazo robótico regrese a la posición inicial después de dejar caer el disco?
- ¿Cómo pueden los bloques de comentarios ayudarte a comprender el flujo de tu proyecto mientras estás codificando?
- Si quisieras mover un segundo disco a una nueva ubicación, ¿qué otros bloques necesitarías agregar?
- RecordarRecuerde a los grupos que hagan preguntas si están confundidos. No todos los
intentos se ejecutarán correctamente. Cada vez que ejecuten el proyecto, los estudiantes deben identificar
qué salió mal y pensar en ideas para solucionarlo. Se espera que haya prueba y error.
Si los estudiantes están frustrados y necesitan más ayuda, pídales que le reiteren el objetivo del proyecto.
Deben utilizar su proyecto Lab 4 Parte 1 como guía.
La solución del Laboratorio Parte 4 2 también está disponible para referencia del docente.

Laboratorio 4 Parte 2 Solución - PreguntaPregunte a los estudiantes qué otras tareas podrían completar utilizando tanto el motor del brazo como el motor de la base. ¿Qué tal un brazo robótico más grande?