
Brincadeira
Parte 1 - Passo a Passo
- InstruaInstrua os alunos que vão criar um projeto em que o braço robótico espera até
que um disco seja detetado (usando o sensor ocular) e, em seguida, move o disco usando o eletroíman. Veja
o vídeo abaixo para ver como o braço robótico pode mover o disco com sucesso, primeiro sentindo-o e depois
deslizando-o para a direita usando o eletroíman.
Arquivo de vídeo
- ModeloModele como construir um projeto utilizando o bloco [Wait Until] e o Eye Sensor.
Peça aos alunos que o acompanhem num ecrã projetado ou através da apresentação de diapositivos do Lab 4.
- Antes de começar, certifique-se de que os alunos têm ligou o seu dispositivo ao seu braço robótico (2 eixos) e que o braço robótico está configurado. Se necessário, modele os passos neste artigo Configurar um braço robótico para orientar os alunos no processo de configuração do seu robô Braço.
Nota: Quando liga pela primeira vez o braço robótico ao dispositivo, o giroscópio incorporado no cérebro pode ser calibrado, fazendo com que o braço robótico se mova sozinho por um momento. Este é um comportamento esperado, não toque no braço do robô durante a calibração.
- Peça aos alunos que abram o seu projeto Laboratório 3 Parte 2. O novo projeto basear-se-á neste projeto. Selecione “Guardar como” ou “Guardar no seu dispositivo” (dependendo da versão do VEXcode GO que está a utilizar) e renomeie o projeto Laboratório 4 Parte 1.

Renomeie o projeto - Se houver algum aluno que não esteve presente no Laboratório 3 ou não conseguir encontrar o seu projeto, peça-lhes que recriem a solução Laboratório 3 Parte 2 da apresentação de diapositivos de imagens do Laboratório 4.
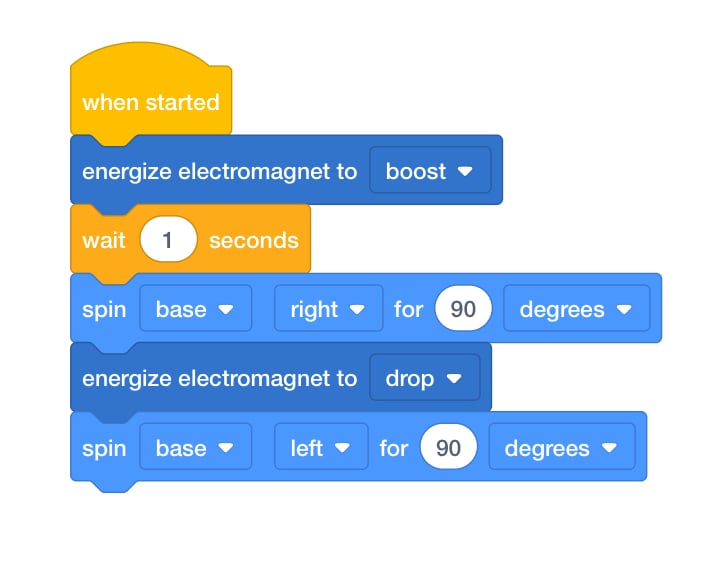
Laboratório 3 Parte 2 Solução - Arraste o bloco [Aguarde até] para o ambiente de trabalho. Explique que o bloco [Wait Until] aceita condições booleanas e irá parar a execução do projeto até que o bloco interno reporte uma condição como ‘True’.
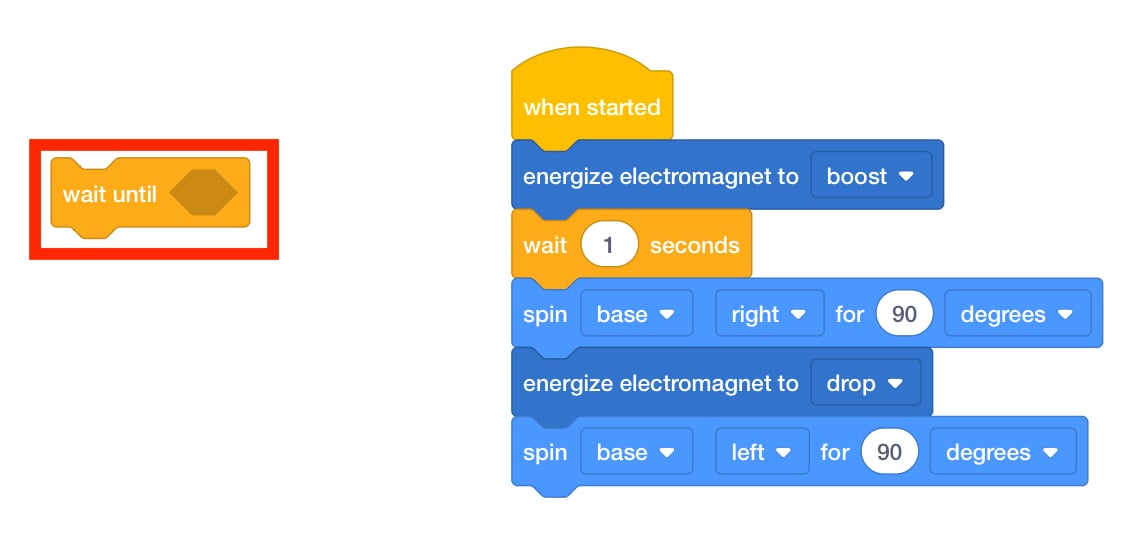
Adicionar Espera até ao Bloco -
Este projeto utilizará o Eye Sensor para detetar se um objeto está presente, de forma a captá-lo. Os dados do Eye Sensor são a condição booleana que estamos a aguardar.
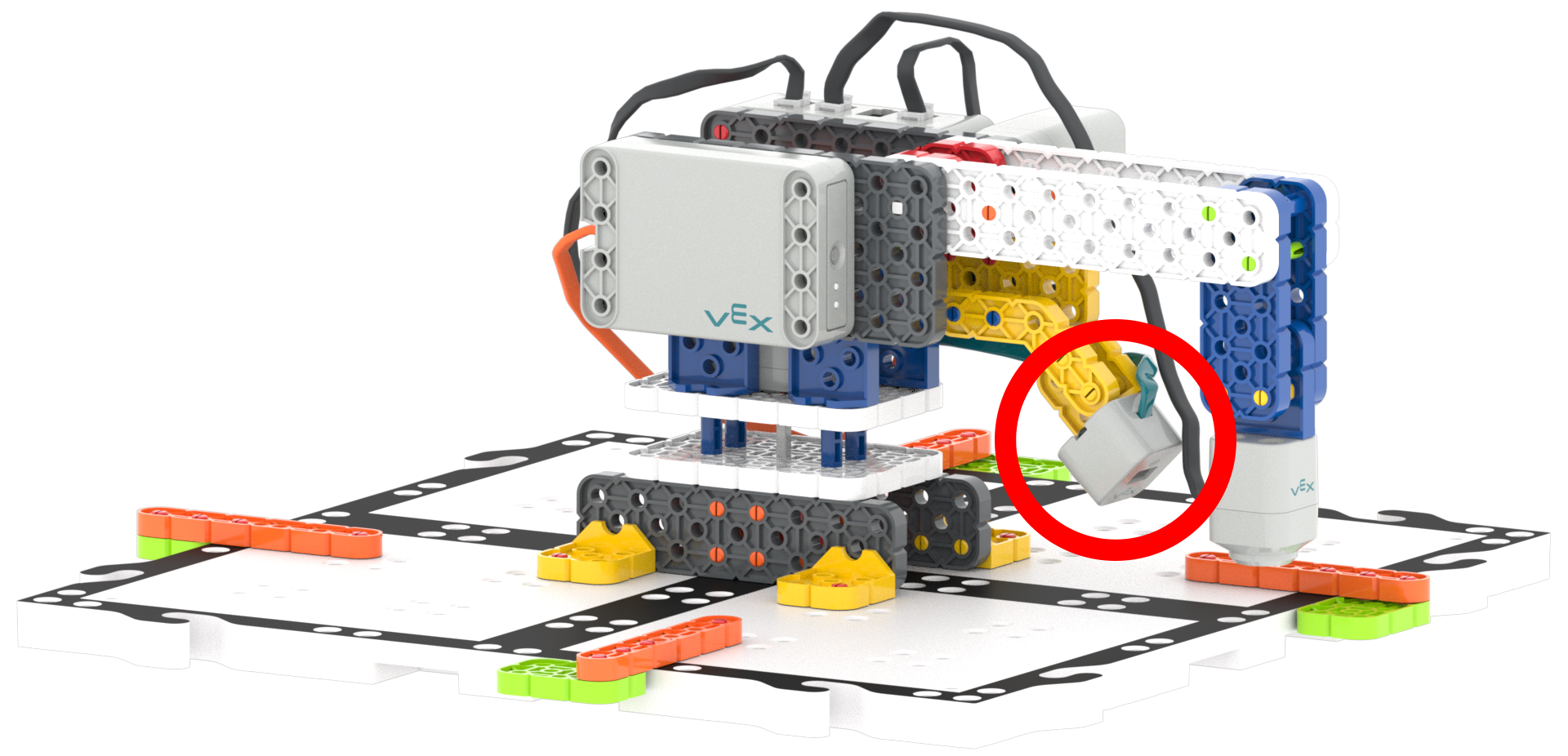
Sensor ocular -
Encontre o bloco <Eye found object> na caixa de ferramentas em 'Sensing'. Explique que <Eye found object> é um bloco booleano que irá reportar Verdadeiro ou Falso, pelo que pode ser utilizado com o bloco [Aguarde até].
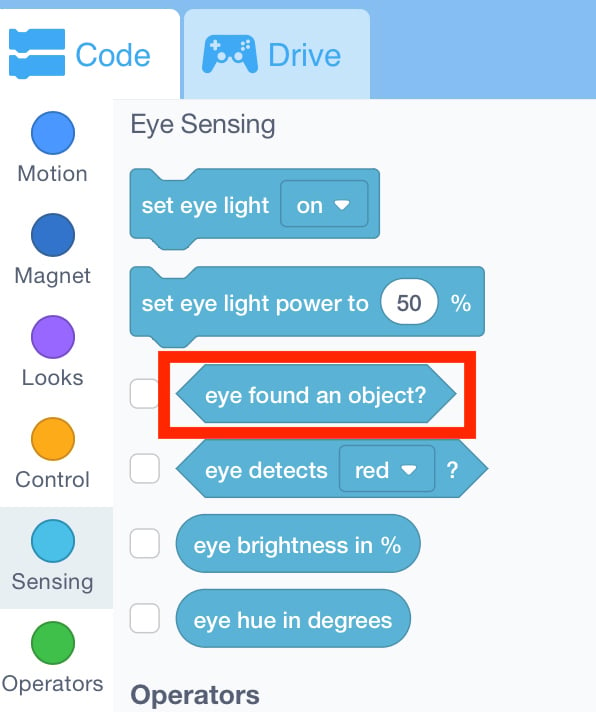
Categoria de deteção ocular - Arraste o <Eye found object> para o bloco [Aguarde até].
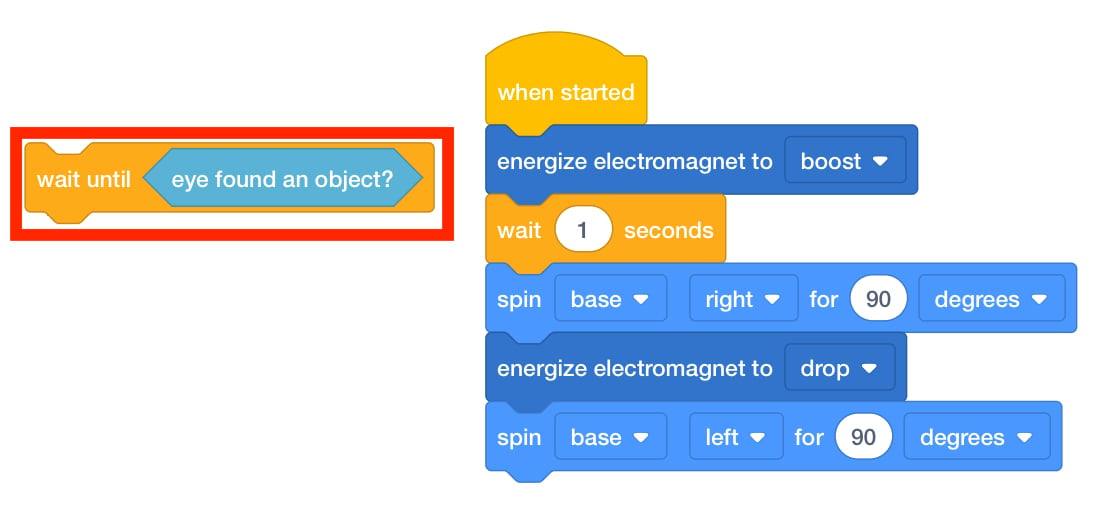
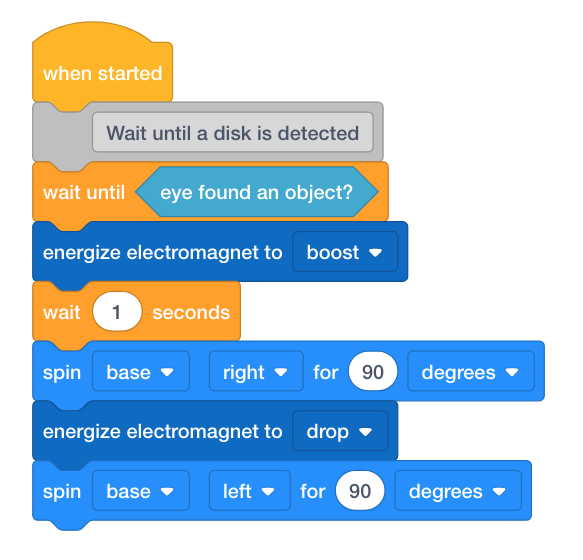
Adicione <Eye Found Object> a [Aguarde até] - Pergunte aos alunos pretendem que o sensor ocular verifique a presença de um objeto. Arraste o bloco [Wait Until] para o início do projeto.
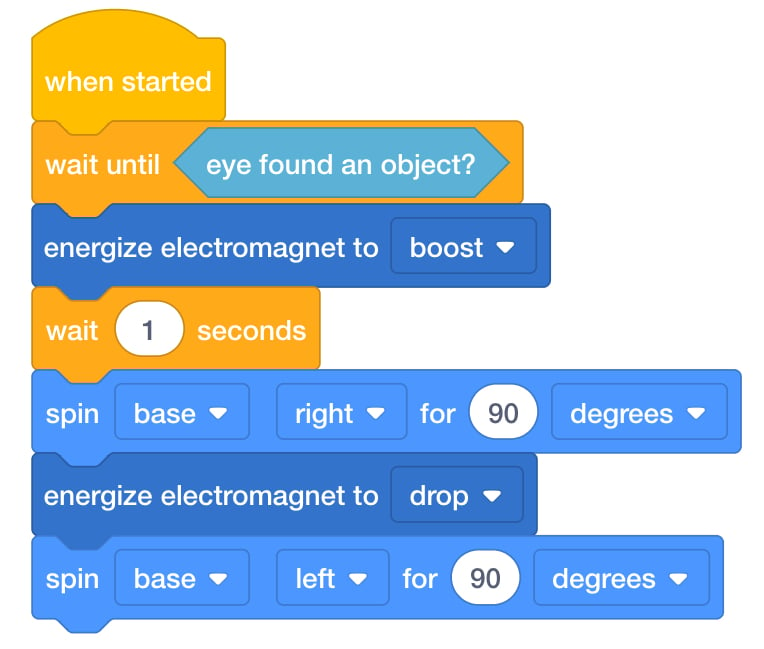
Laboratório 4 Parte 1 Solução - Peça aos alunos que coloquem um disco no eletroíman e iniciem o projeto e vejam como o braço do robô se move. Deverão iniciar o projeto com um Disco acoplado ao Eletroíman. Se tiverem algum problema ao utilizar o sensor ocular, peça-lhes que sigam estes passos novamente. Se necessário, consulte o artigo Iniciar um projeto no VEXcode GO, e modelar para os alunos as etapas deste artigo para iniciar um projeto.
- FacilitarFacilitar conversas sobre o fluxo do projeto, enquanto os alunos testam o seu
código. Utilize a solução fornecida na apresentação de diapositivos do Lab 4 para verificar os seus
projetos à medida que circula.
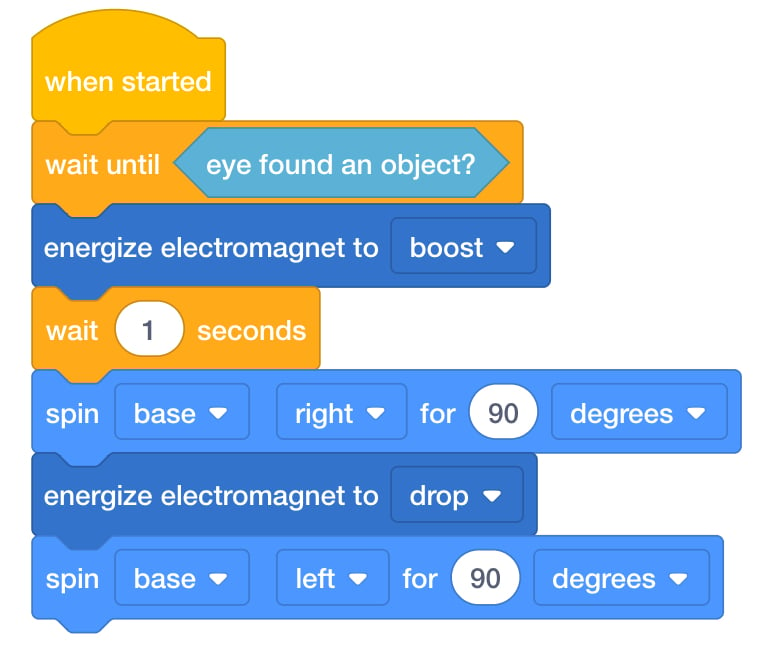
Laboratório 4 Parte 1 Solução Faça-lhes algumas das seguintes perguntas para iniciar uma discussão.
- Por palavras suas, como explicaria o que é uma condição booleana?
- O que achas que aconteceria se movêssemos o bloco [Espera até] para uma parte diferente do projeto? Como mudaria o fluxo do projeto?
- Se quisesse mover um segundo disco no final do projeto, que outros blocos teria de adicionar?
- Em que é que este projeto é semelhante ou diferente do projeto que fez no Laboratório 3?
- RecordarLembre os grupos de colocarem questões se ficarem confusos. Nem todas as
tentativas serão executadas corretamente. Cada vez que executam o projeto, os alunos devem identificar o
que correu mal e debater ideias sobre como corrigir. Tentativa e erro são esperados.
Se os alunos estiverem frustrados e precisarem de mais assistência, peça-lhes que reiterem o objetivo do projeto para si.
- PerguntePergunte aos alunos que dispositivos conhecem que possam utilizar um sensor
ocular. (Aspirador robot, campainhas eletrónicas)
Se tiverem dificuldade em fazer uma lista, peça-lhes que façam uma lista de dispositivos para os quais gostariam de ter um sensor ocular.
- Exemplo: gostaria de ter um sensor ocular na porta das traseiras, para que cada vez que o cão quisesse sair, o sensor ocular nos dissesse que o cão estava à porta.
Discussão em grupo ao intervalo & a meio do jogo
Assim que cada grupo tiver criado um projeto utilizando o Sensor ocular e o bloco [Aguarde até], reúnam-se para uma breve conversa .
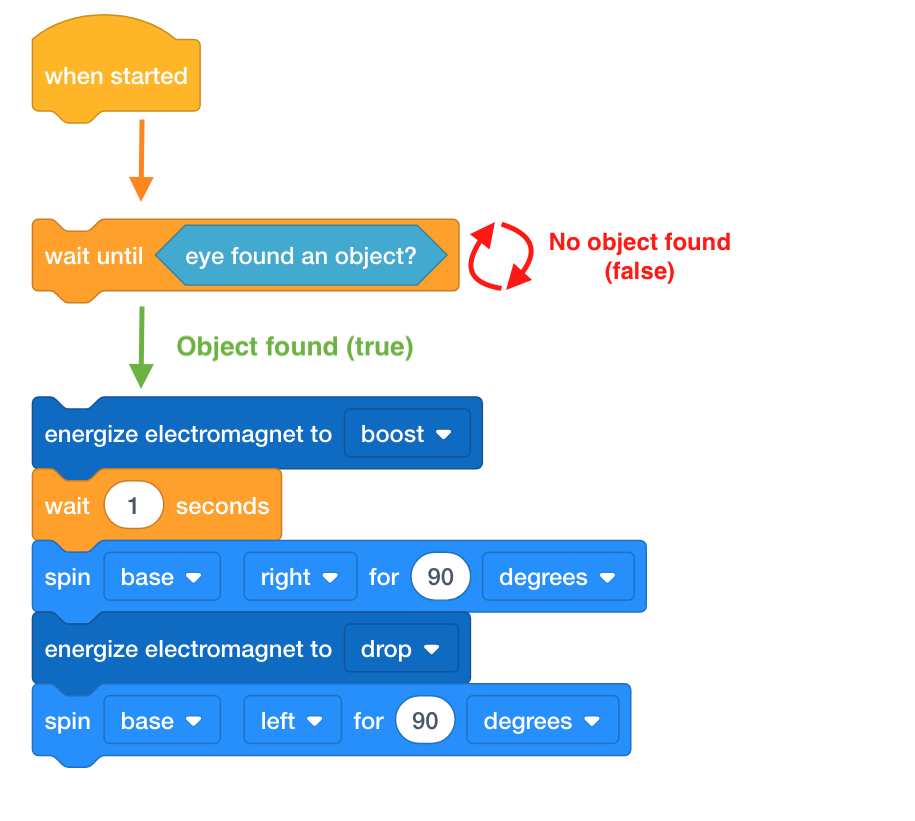
Vamos falar sobre o fluxo do projeto com o bloco [Wait Until].
- Porque é que foi importante colocar o bloco [Espera até] no início do projeto?
- O que aconteceria ao fluxo do nosso projeto se o bloco [Aguardar até] estivesse num local diferente?
- O nosso braço robótico ainda funcionaria da forma que queríamos?
Parte 2 - Passo a Passo
- InstructInstrua os alunos que irão iterar no seu projeto para fazer o
Braço do Robot aguarde até que um disco seja detetado, levante o disco, mova o disco para outra parte do azulejo, solte
o disco e regresse ao ponto inicial localização. Veja o vídeo abaixo para ver como o braço robótico
poderia mover o disco com sucesso, primeiro sentindo o disco e depois levantando-o para o mover para outro
local utilizando o eletroíman.
Arquivo de vídeo
- ModeloModelo para os alunos como alterar o bloco [Spin for] para controlar o Motor do
Braço.
-
Os alunos devem abrir o seu projeto Laboratório 4 Parte 1 e renomeá-lo como Laboratório 4 Parte 2. Antes de começar, certifique-se de que os alunos têm ligou o seu dispositivo ao seu braço robótico (2 eixos) e que o O braço do robô está configurado.

Renomeie o projeto - Arraste o bloco [Spin for] para o ambiente de trabalho. Pergunte aos alunos se se lembram de como mudar de 'base' para 'braço'.
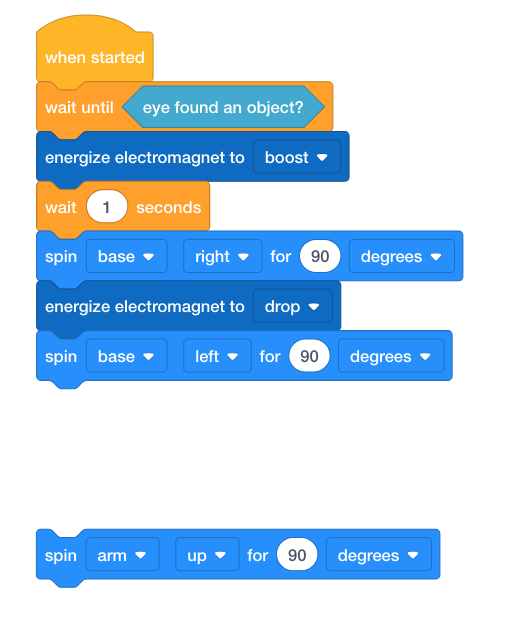
Adicione [Rodar para] ao espaço de trabalho - Assista à animação na apresentação de diapositivos de imagens do Laboratório 4 e pergunte aos alunos onde são necessários blocos adicionais [Rodar para] para mover o braço da forma apresentada.
- Students can use comment blocks to remind themselves what each step of the process is. Explique que os comentários são apenas para o codificador, e não para o robô; portanto, não afetarão o fluxo do projeto.

[Comentário] bloco - Modele arrastando um bloco de comentários para o ambiente de trabalho e digite um dos passos no
bloco.
- Aguarde até que um disco seja detectado
- Levante o disco
- Mova o disco para outra parte do bloco
- Solte o disco
- Regressar ao local de partida
- Explique que os comentários são apenas para o codificador, e não para o robô; portanto, não afetarão o fluxo do projeto.
bloco [Comentário] adicionado - Peça aos alunos que coloquem um disco no eletroíman e iniciem o projeto e vejam como o braço do robô se move. They should start the project with a Disk attached to the Electromagnet. Se necessário, consulte o artigo Iniciar um projeto no VEXcode GO, e modelo para os alunos as etapas deste artigo para iniciar um projeto.
-
- FacilitarFacilitar conversas sobre o fluxo do projeto à medida que os alunos começam a
iterar nos seus projetos.

O seu braço robótico deveria... Faça perguntas como:
- O que pensa que aconteceria se o bloco [Espere até] fosse adicionado depois de o motor do braço ser acionado? Como é que isso mudaria o fluxo do seu projeto?
- Porque acha que queremos que o braço robótico regresse ao local inicial após retirar o disco?
- Como é que os blocos de comentários podem ajudá-lo a compreender o fluxo do seu projeto enquanto codifica?
- Se quisesse mover um segundo disco para um local totalmente novo, que outros blocos teria de adicionar?
- RecordarLembre os grupos de colocarem questões se ficarem confusos. Nem todas as
tentativas serão executadas corretamente. Cada vez que executam o projeto, os alunos devem identificar o
que correu mal e debater ideias sobre como corrigir. Tentativa e erro são esperados.
Se os alunos estiverem frustrados e precisarem de mais assistência, peça-lhes que reiterem o objetivo do projeto para si.
Devem usar o projeto Lab 4 Part 1 como guia.
A solução Lab 4 Parte 2 também está disponível para consulta do professor.

Laboratório 4 Parte 2 Solução - PerguntePergunte aos alunos que outras tarefas poderiam realizar utilizando o Motor do Braço e o Motor da Base. Que tal um braço robótico maior?