
Spielen
Teil 1 - Schritt für Schritt
- AnweisungenWeisen Sie die Schüler an, ein Projekt zu erstellen, bei dem der Roboterarm
wartet, bis eine Scheibe erkannt wird (mithilfe des Augensensors), und die Scheibe dann mithilfe des
Elektromagneten bewegt. Sehen Sie sich das Video unten an, um zu sehen, wie der Roboterarm die Scheibe
erfolgreich bewegen kann, indem er sie zuerst erkennt und sie dann mithilfe des Elektromagneten nach
rechts schiebt.
Videodatei
- ModellModell, wie ein Projekt mit dem Block [Warten bis] und dem Augensensor erstellt
wird. Lassen Sie die Schüler Ihnen auf einer Projektionsfläche oder durch die Diashow von Labor 4 folgen.
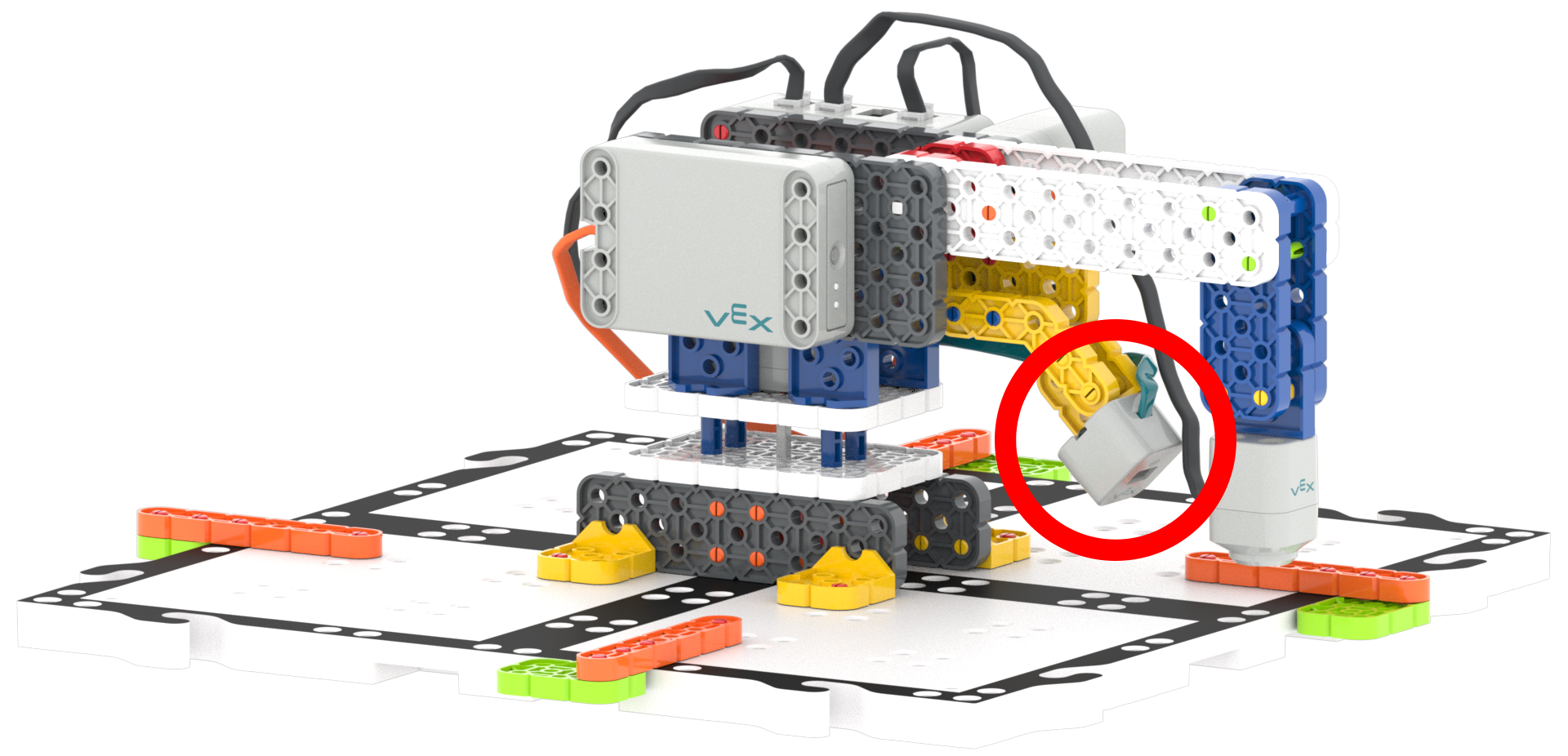
- Bevor Sie beginnen, stellen Sie sicher, dass die Schüler dies getan haben ihr Gerät angeschlossen haben zu ihrem Roboterarm (2-Achsen) und dass der Roboterarm es ist konfiguriert. Modellieren Sie bei Bedarf die Schritte in diesem Artikel Konfigurieren Sie einen Roboterarm um Schüler bei der Konfiguration ihres Roboters anzuleiten Arm.
Hinweis: Wenn Sie Ihren Roboterarm zum ersten Mal an Ihr Gerät anschließen, wird der im Gehirn integrierte Gyro möglicherweise kalibriert, wodurch sich der Roboterarm für einen Moment von selbst bewegt. Dies ist ein erwartetes Verhalten. Berühren Sie den Roboterarm während der Kalibrierung nicht.
- Lassen Sie die Schüler ihr Projekt Labor 3 Teil 2 öffnen. Das neue Projekt wird auf diesem Projekt aufbauen. Wählen Sie „Speichern unter“ oder „Auf Ihrem Gerät speichern“ (je nachdem, welche VEXcode GO-Version Sie verwenden) und benennen Sie das Projekt Labor 4 Teil 1.

Projekt umbenennen - Falls Schüler bei Übung 3 nicht anwesend waren oder ihr Projekt nicht finden können, lassen Sie sie die Lösung zu Übung 3, Teil 2 aus der Bilder-Diashow zu Übung 4 neu erstellen.
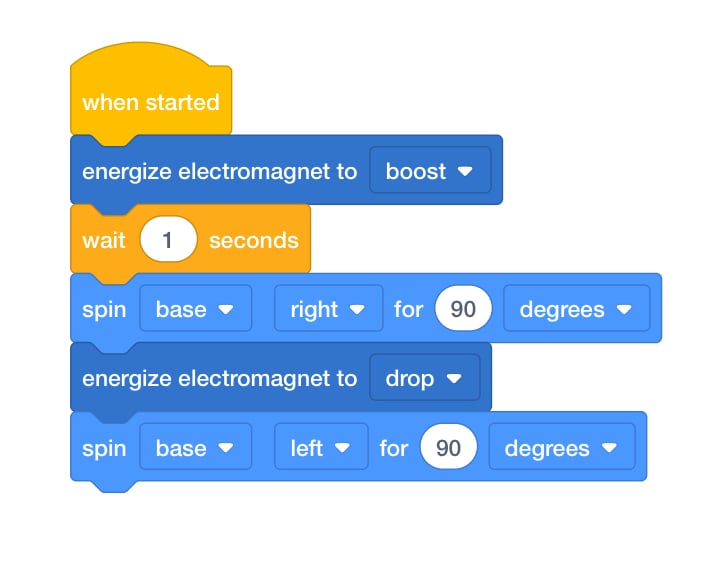
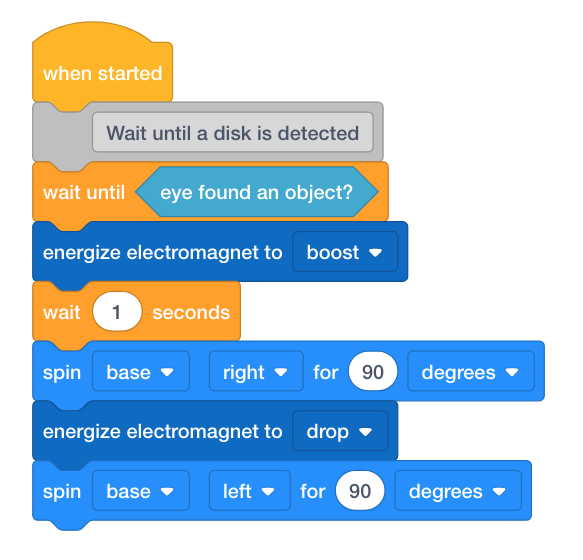
Labor 3 Teil 2 Lösung - Ziehen Sie den Block [Warten bis] in den Arbeitsbereich. Erklären Sie, dass der Block [Warten bis] Boolesche Bedingungen akzeptiert und die Ausführung des Projekts stoppt, bis der darin enthaltene Block eine Bedingung als „Wahr“ meldet.
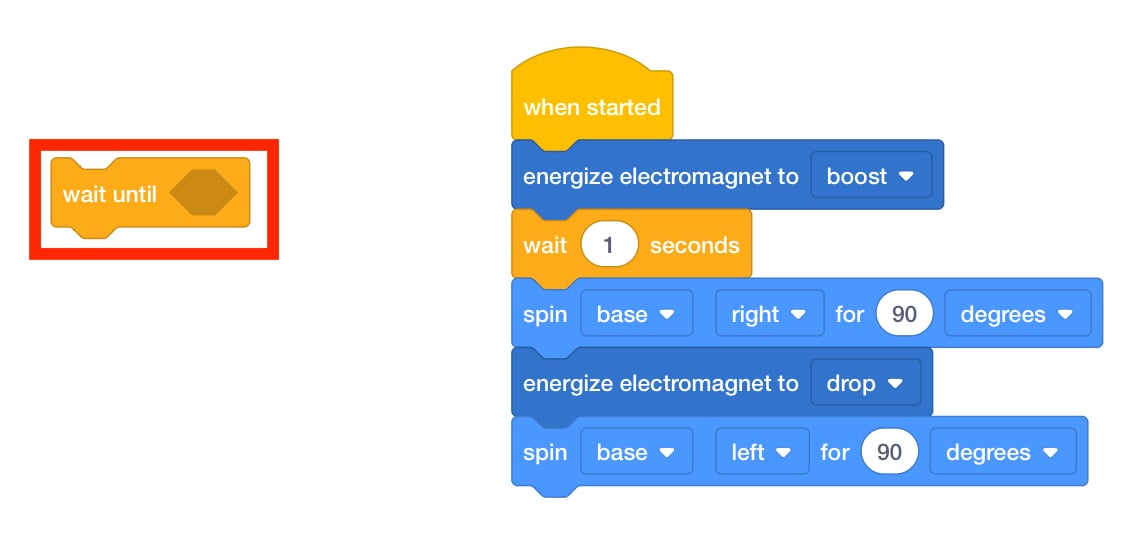
Hinzufügen Warten bis Block -
In diesem Projekt wird der Augensensor verwendet, um zu erkennen, ob ein Objekt vorhanden ist, um es aufzunehmen. Die Daten des Augensensors sind die Boolesche Bedingung, auf die wir warten.
Augensensor -
Suchen Sie in der Toolbox unter „Sensing“ nach dem Block <Eye found object>. Erklären Sie, dass die <Eye found object> ein Boolescher Block ist, der entweder „Wahr“ oder „Falsch“ meldet und daher mit dem Block [Warten bis] verwendet werden kann.
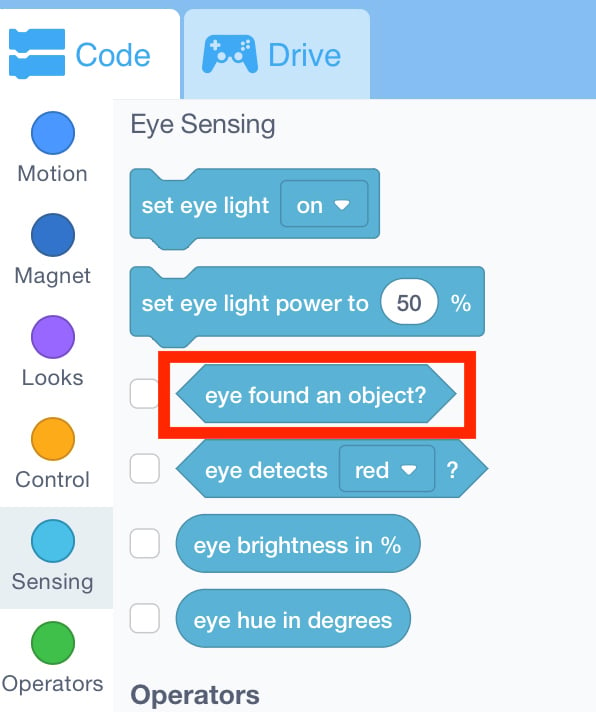
Augensensor Kategorie - Ziehen Sie die <Eye found object> in den Block [Warten bis].
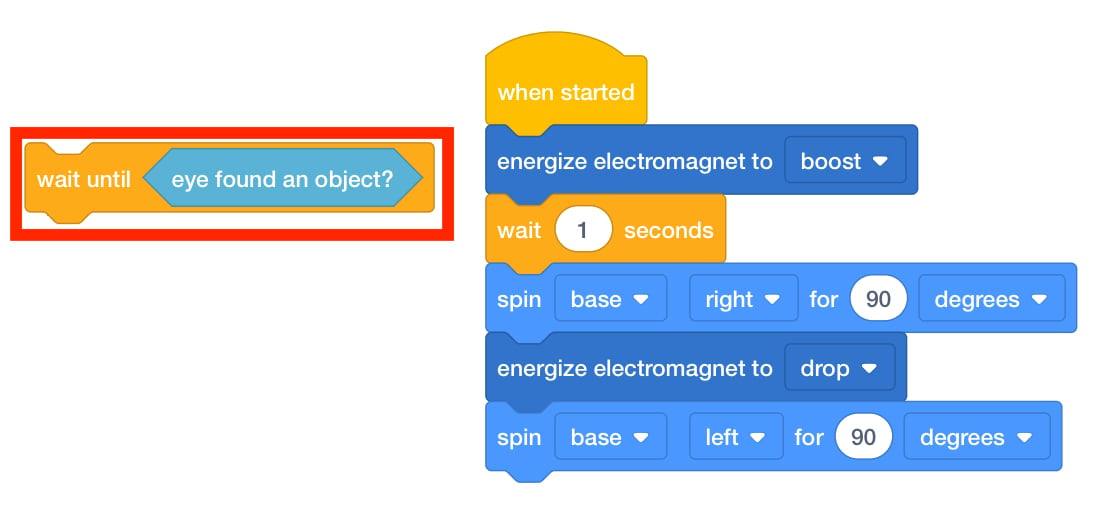
Addiere <Eye Found Object> zu [Warten bis] - Fragen Sie die Schüler, wo der Augensensor nach einem Objekt suchen soll. Ziehen Sie den Block [Warten bis] an den Anfang des Projekts.
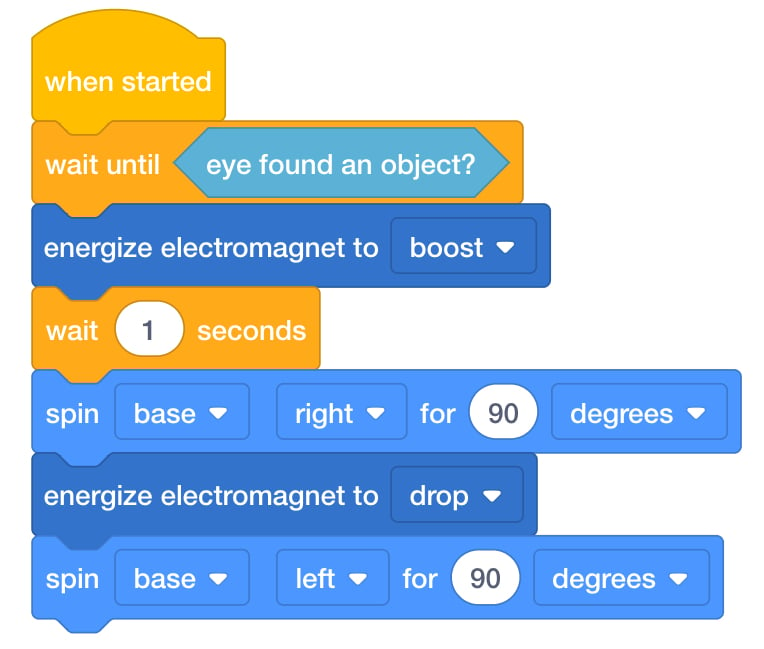
Labor 4 Teil 1 Lösung - Lassen Sie die Schüler eine Scheibe auf den Elektromagneten legen, das Projekt starten und sehen, wie sich ihr Roboterarm bewegt. Sie sollten das Projekt mit einer an den Elektromagneten angeschlossenen Scheibe beginnen. Wenn bei der Verwendung des Augensensors Probleme auftreten, lassen Sie sie diese Schritte erneut ausführen. Lesen Sie bei Bedarf den Artikel Starten eines Projekts in VEXcode GO, und den Schülern die Schritte dabei vorleben Artikel, um ein Projekt zu starten.
- ModerierenModerieren Sie Gespräche über den Projektablauf, während die Schüler ihren
Code testen. Verwenden Sie die in der Diashow zu Labor 4 bereitgestellte Lösung, um ihre Projekte im
Umlauf zu überprüfen.
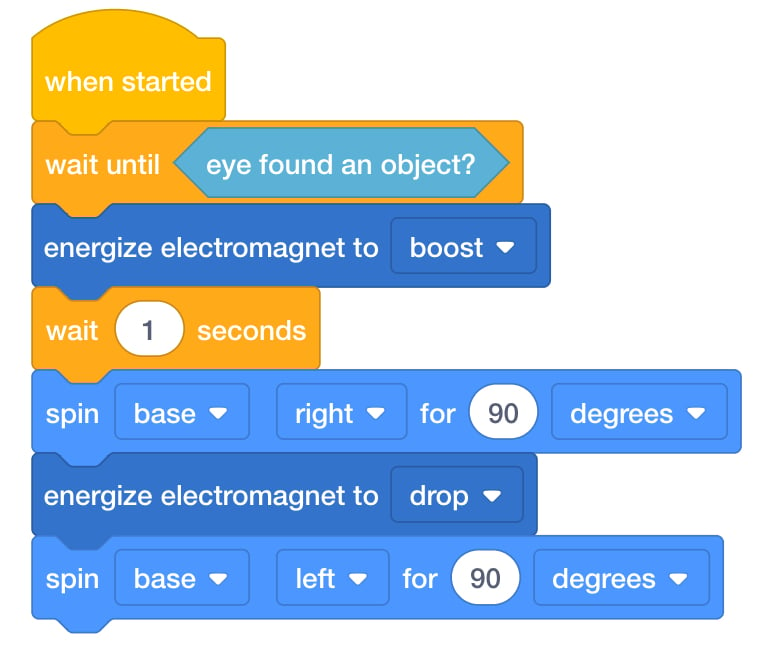
Labor 4 Teil 1 Lösung Stellen Sie ihnen einige der folgenden Fragen, um eine Diskussion anzuregen.
- Wie würden Sie in Ihren eigenen Worten erklären, was eine Boolesche Bedingung ist?
- Was würde Ihrer Meinung nach passieren, wenn wir den Block [Warten bis] in einen anderen Teil des Projekts verschieben würden? Wie würde sich der Projektablauf ändern?
- Wenn Sie am Ende des Projekts eine zweite Festplatte verschieben möchten, welche weiteren Blöcke müssten Sie hinzufügen?
- Inwiefern ähnelt oder unterscheidet sich dieses Projekt von dem Projekt, das Sie in Labor 3 erstellt haben?
- ErinnernErinnern Sie Gruppen daran, Fragen zu stellen, wenn sie verwirrt sind. Nicht
jeder Versuch wird erfolgreich verlaufen. Bei jeder Projektdurchführung sollten die Schülerinnen und
Schüler ermitteln, was schiefgelaufen ist, und gemeinsam Ideen zur Behebung des Problems entwickeln. Es
wird mit Versuch und Irrtum gerechnet.
Wenn die Schüler frustriert sind und weitere Unterstützung benötigen, lassen Sie sie Ihnen das Ziel des Projekts noch einmal erläutern.
- FrageFragen Sie die Schüler, welche Geräte sie kennen, die einen Augensensor verwenden
könnten. (Staubsaugerroboter, elektronische Türklingeln)
Wenn es ihnen schwerfällt, eine Liste zu erstellen, bitten Sie sie, eine Liste der Geräte zu erstellen, für die sie sich einen Augensensor wünschen.
- Beispiel: Ich möchte einen Augensensor an meiner Hintertür, sodass uns der Augensensor jedes Mal anzeigt, dass der Hund an der Tür ist, wenn er nach draußen möchte.
Spielpause & Gruppendiskussion
Sobald jede Gruppe ein Projekt mithilfe des Augensensors und des [Warten bis]-Blockserstellt hat, kommt ihr zu einem kurzen Gespräch zusammen.
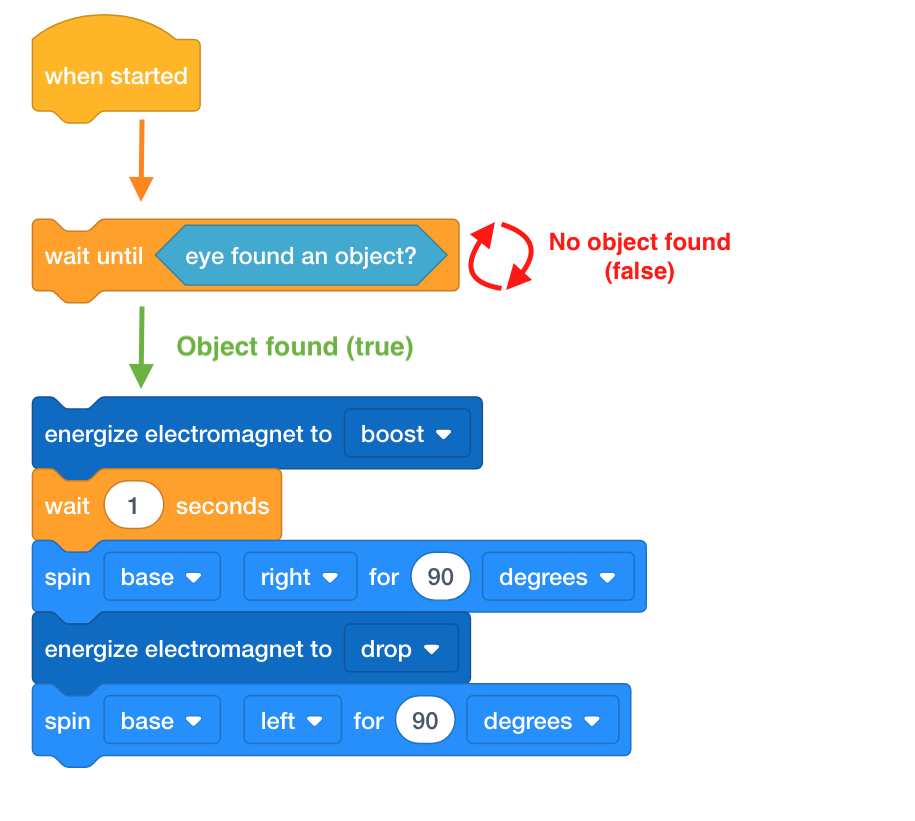
Lassen Sie uns über den Projektablauf mit dem Block [Warten bis] sprechen.
- Warum war es wichtig, den Block [Warten bis] an den Anfang des Projekts zu setzen?
- Was würde mit unserem Projektablauf passieren, wenn sich der Block [Warten bis] an einer anderen Stelle befände?
- Würde unser Roboterarm immer noch so funktionieren, wie wir es wollten?
Teil 2 - Schritt für Schritt
- AnweisungenWeisen Sie die Schüler an, ihr Projekt so zu wiederholen, dass der
Roboterarm wartet, bis eine Scheibe erkannt wird, die Scheibe anhebt, die Scheibe an einen anderen Teil
der Kachel bewegt, die Scheibe fallen lässt und zum Ausgangspunkt zurückkehrt. Sehen Sie sich das Video
unten an, um zu erfahren, wie der Roboterarm die Scheibe erfolgreich bewegen konnte, indem er die Scheibe
zuerst erfasste und sie dann anhob, um sie mithilfe des Elektromagneten an eine andere Stelle zu bewegen.
Videodatei
- ModellModell für Schüler, wie der Block [Drehen für] geändert wird, um den Armmotor zu
steuern.
-
Die Studierenden sollten ihr Projekt Labor 4 Teil 1 öffnen und es Labor 4 Teil 2umbenennen. Bevor Sie beginnen, stellen Sie sicher, dass die Schüler dies getan haben ihr Gerät angeschlossen haben zu ihrem Roboterarm (2-Achsen) und dass die Roboterarm ist konfiguriert.

Projekt umbenennen - Ziehen Sie den Block [Spin für] in den Arbeitsbereich. Fragen Sie die Schüler, ob sie sich noch daran erinnern, wie man von „Base“ zu „Arm“ wechselt.
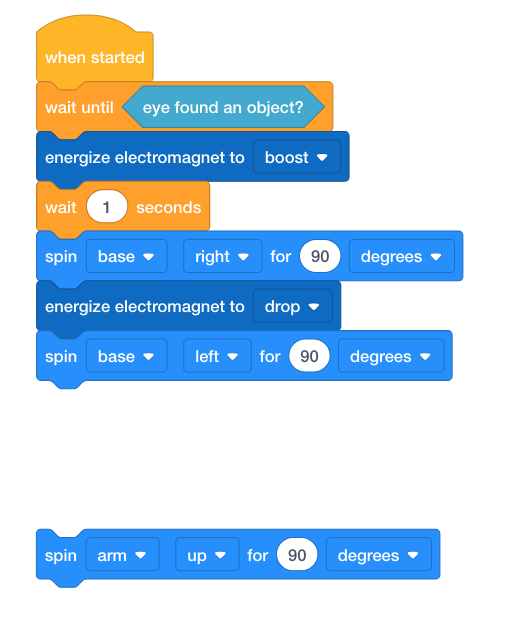
[Spin für] zum Arbeitsbereich hinzufügen - Sehen Sie sich die Animation in der Bild-Diashow zu Labor 4 an und fragen Sie die Schüler, wo zusätzliche [Spin für]-Blöcke benötigt werden, um den Arm wie gezeigt zu bewegen.
- Studierende können nutzen Kommentarblöcke um sich daran zu erinnern, was jeder Schritt des Prozess ist. Erklären Sie, dass Kommentare nur für den Programmierer und nicht für den Roboter bestimmt sind. Sie haben daher keinen Einfluss auf den Projektablauf.

[Kommentar] Block - Ziehen Sie dazu einen Kommentarblock in den Arbeitsbereich und geben Sie einen der Schritte in den
Block ein.
- Warten Sie, bis eine Festplatte erkannt wird
- Heben Sie die Scheibe an
- Bewegen Sie die Scheibe an einen anderen Teil der Kachel
- Lassen Sie die Festplatte fallen
- Zurück zum Ausgangspunkt
- Erklären Sie, dass Kommentare nur für den Programmierer und nicht für den Roboter bestimmt sind. Sie haben daher keinen Einfluss auf den Projektablauf.
[Kommentar] Block hinzugefügt - Lassen Sie die Schüler eine Scheibe auf den Elektromagneten legen, das Projekt starten und sehen, wie sich ihr Roboterarm bewegt. Sie sollten das Projekt mit einer angehängten Diskette starten Elektromagnet. Bei Bedarf lesen Sie den Artikel Starten Sie ein Projekt in VEXcode GO, und modellieren Sie die Schritte in diesem Artikel für Schüler ein Projekt starten.
-
- ModerierenModerieren Sie Gespräche über den Projektablauf, wenn die Studierenden
beginnen, ihre Projekte zu iterieren.

Ihr Roboterarm sollte... Stellen Sie Fragen wie:
- Was würde Ihrer Meinung nach passieren, wenn der Block [Warten bis] hinzugefügt würde, nachdem der Arm-Motor hochgefahren wurde? Wie würde das den Ablauf Ihres Projekts verändern?
- Warum wollen wir Ihrer Meinung nach, dass der Roboterarm nach dem Ablegen der Scheibe zum Ausgangspunkt zurückkehrt?
- Wie können Ihnen Kommentarblöcke beim Codieren helfen, den Ablauf Ihres Projekts zu verstehen?
- Wenn Sie eine zweite Festplatte an einen völlig neuen Speicherort verschieben möchten, welche anderen Blöcke müssten Sie hinzufügen?
- ErinnernErinnern Sie Gruppen daran, Fragen zu stellen, wenn sie verwirrt sind. Nicht
jeder Versuch wird erfolgreich verlaufen. Bei jeder Projektdurchführung sollten die Schülerinnen und
Schüler ermitteln, was schiefgelaufen ist, und gemeinsam Ideen zur Behebung des Problems entwickeln. Es
wird mit Versuch und Irrtum gerechnet.
Wenn die Schüler frustriert sind und weitere Unterstützung benötigen, lassen Sie sie Ihnen das Ziel des Projekts noch einmal erläutern.
Sie sollten ihr Projekt Lab 4 Part 1 als Leitfaden verwenden.
Die Lösung Lab 4, Teil 2, steht Lehrern ebenfalls als Referenz zur Verfügung.

Labor 4 Teil 2 Lösung - FrageFragen Sie die Schüler, welche anderen Aufgaben sie möglicherweise mit dem Armmotor und dem Basismotor erledigen könnten. Wie wäre es mit einem größeren Roboterarm?