
Giocare
Parte 1 - Passo dopo passo
- IstruisciInforma gli studenti che creeranno un progetto in cui il braccio robotico
attende che venga rilevato un disco (utilizzando il sensore oculare), quindi sposta il disco utilizzando
l'elettromagnete. Guarda il video qui sotto per vedere come il braccio robotico riesce a spostare il disco
con successo, prima rilevandolo e poi facendolo scorrere verso destra utilizzando l'elettromagnete.
File video
- ModelloModello su come costruire un progetto utilizzando il blocco [Aspetta fino a] e
il sensore oculare. Chiedete agli studenti di seguirvi su uno schermo proiettato o tramite la
presentazione Lab 4.
- Prima di iniziare, assicurarsi che gli studenti lo abbiano fatto collegato il proprio dispositivo al braccio del robot (2 assi) e che il braccio del robot lo è configurato. Se necessario, modella i passaggi descritti in questo articoloConfigura un braccio robotico per guidare gli studenti nel processo di Configurazione del proprio Robot Braccio.
Nota: Quando colleghi per la prima volta il tuo braccio robotico al tuo dispositivo, il giroscopio integrato nel cervello potrebbe calibrarsi, facendo sì che il braccio robotico si muova da solo per un momento. Questo è un comportamento previsto, non toccare il braccio robotico durante la calibrazione.
- Chiedi agli studenti di aprire il loro progetto Lab 3 Parte 2. Il nuovo progetto si baserà su questo progetto. Seleziona "Salva con nome" o "Salva sul tuo dispositivo" (a seconda della versione di VEXcode GO che stai utilizzando) e rinomina il progetto Lab 4 Parte 1.

Rinomina il progetto - Se ci sono studenti che non erano presenti al Lab 3 o non riescono a trovare il loro progetto, chiedete loro di ricreare la soluzione Lab 3 Parte 2 dalla presentazione di immagini del Lab 4.
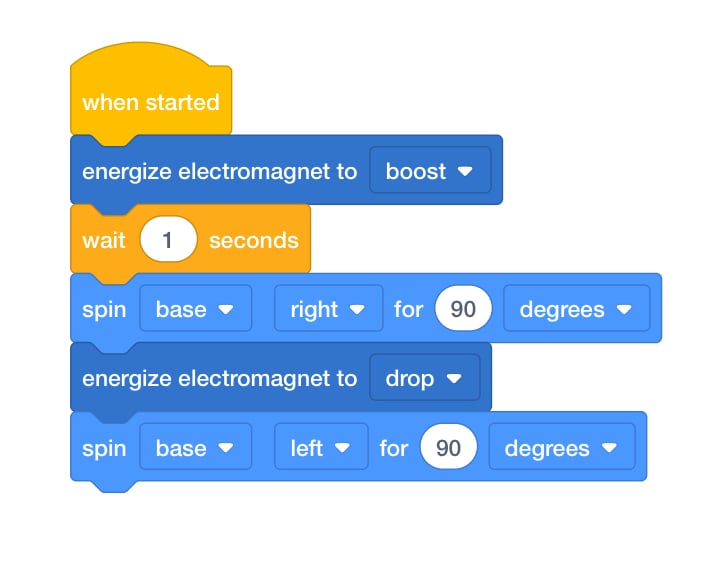
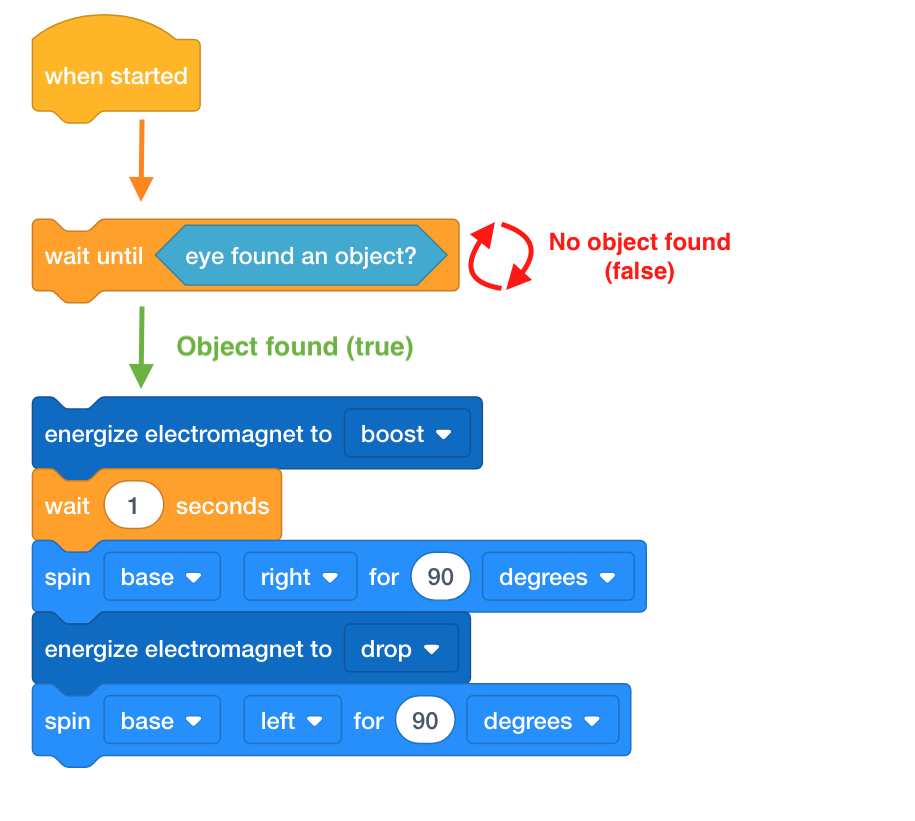
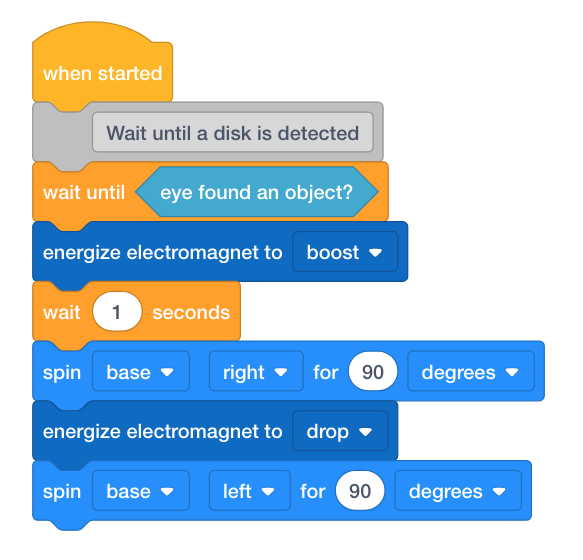
Lab 3 Parte 2 Soluzione - Trascinare il blocco [Attendi fino a] nell'area di lavoro. Spiega che il blocco [Aspetta fino a] accetta condizioni booleane e interromperà l'esecuzione del progetto finché il blocco al suo interno non segnala una condizione come "Vero".
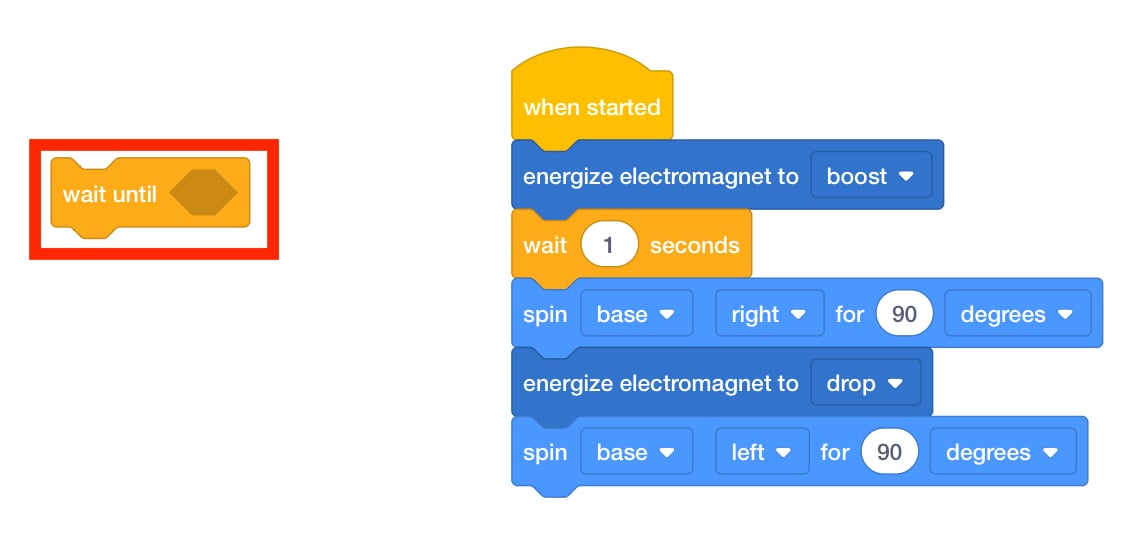
Aggiungi Attendi fino al blocco -
Questo progetto utilizzerà l'Eye Sensor per rilevare se un oggetto è presente, in modo da poterlo raccogliere. I dati del sensore oculare sono la condizione booleana che stiamo aspettando.
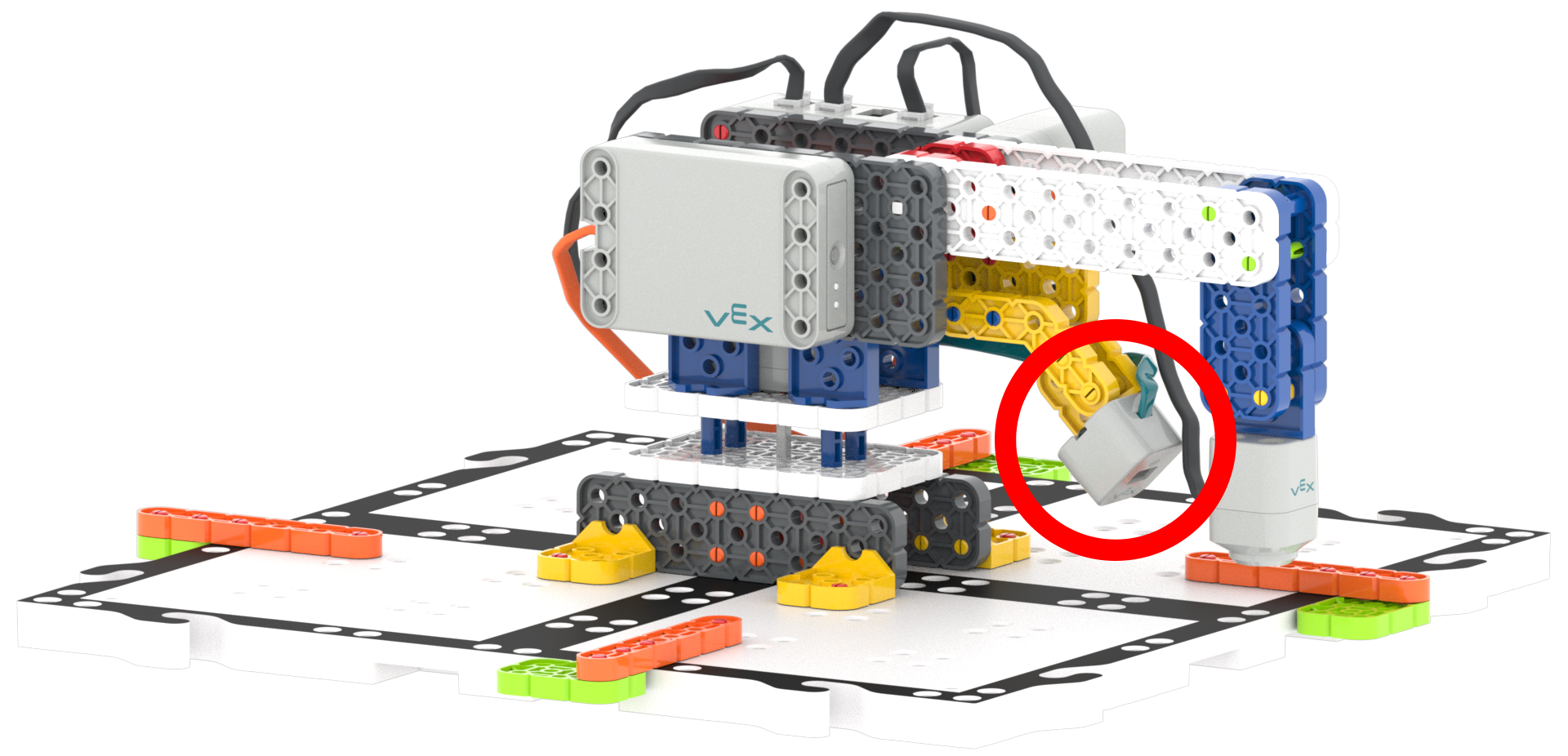
Sensore oculare -
Trova il blocco <Eye found object> nella casella degli strumenti sotto "Rilevamento". Spiega che <Eye found object> è un blocco booleano che riporterà Vero o Falso, quindi può essere utilizzato con il blocco [Aspetta fino a].
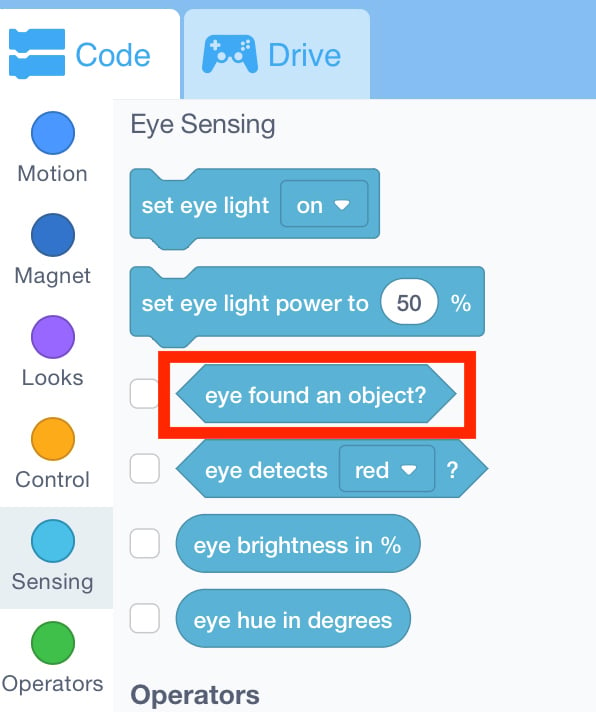
Categoria di rilevamento degli occhi - Trascina lo <Eye found object> nel blocco [Attendi fino a].
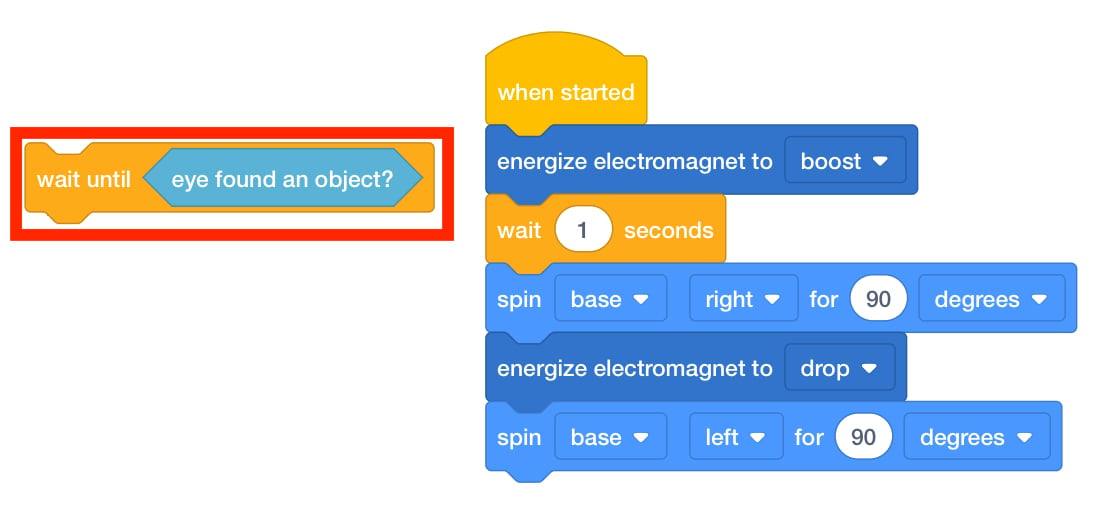
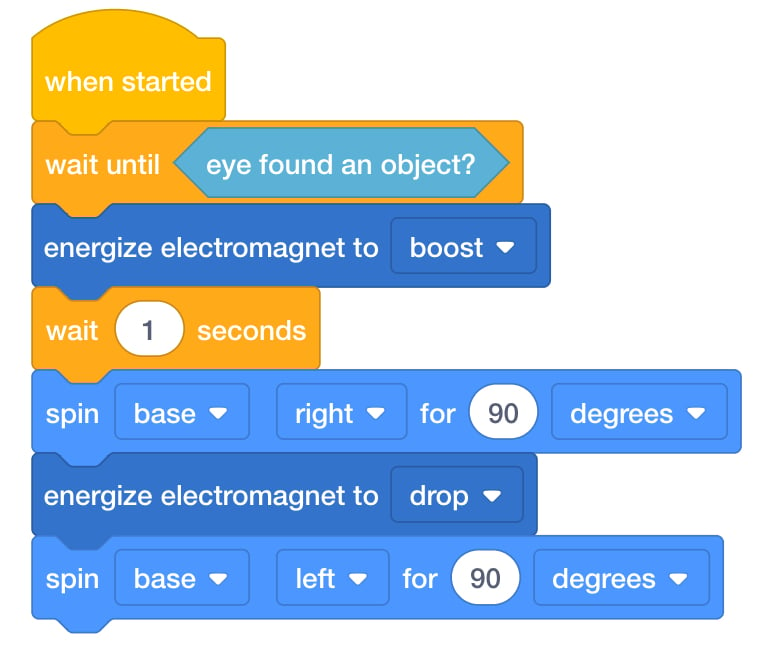
Aggiungi <Eye Found Object> a [Aspetta fino a] - Chiedere agli studenti vogliono che il sensore oculare controlli la presenza di un oggetto. Trascina il blocco [Attendi fino a] all'inizio del progetto.
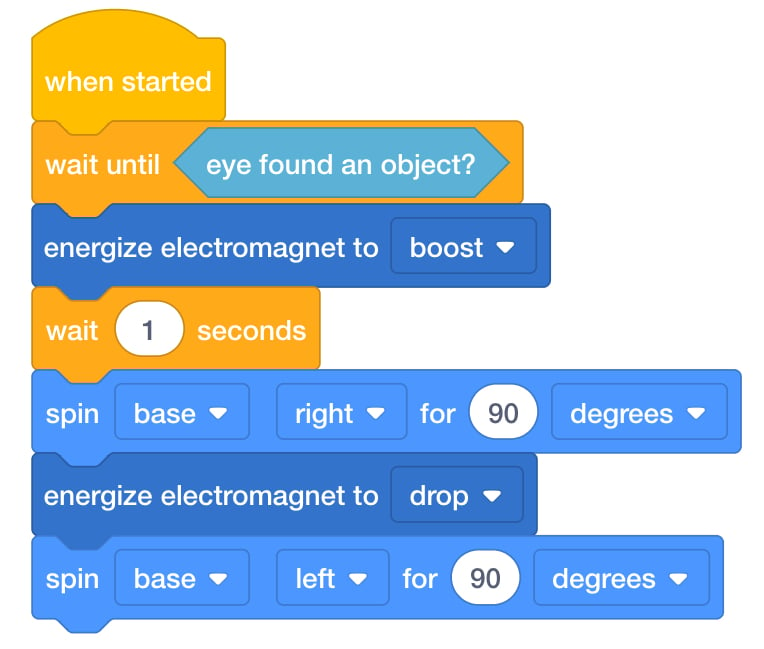
Lab 4 Parte 1 Soluzione - Chiedete agli studenti di posizionare un disco sull'elettromagnete e di avviare il progetto, osservando come si muove il braccio robotico. Dovrebbero iniziare il progetto con un disco collegato all'elettromagnete. Se riscontrano problemi nell'utilizzo del sensore oculare, chiedete loro di ripetere la procedura descritta. Se necessario, vedere l'articolo Avvio di un progetto in VEXcode GO, e modellare per gli studenti i passaggi da seguire articolo per avviare un progetto.
- FacilitareFacilitare le conversazioni sul flusso del progetto mentre gli studenti
testano il loro codice. Utilizzate la soluzione fornita nella presentazione Lab 4 per controllare i loro
progetti mentre vi spostate.
Lab 4 Parte 1 Soluzione Per avviare una discussione, ponete loro alcune delle seguenti domande.
- Con parole tue, come spiegheresti cos'è una condizione booleana?
- Cosa pensi che accadrebbe se spostassimo il blocco [Aspetta fino a] in una parte diversa del progetto? Come cambierebbe il flusso del progetto?
- Se volessi spostare un secondo disco alla fine del progetto, quali altri blocchi dovresti aggiungere?
- In che modo questo progetto è simile o diverso dal progetto che hai realizzato nel Lab 3?
- RicordaRicorda ai gruppi di porre domande se sono confusi. Non tutti i tentativi
andranno a buon fine. Ogni volta che eseguono il progetto, gli studenti dovrebbero identificare cosa è
andato storto e fare un brainstorming di idee su come risolverlo. È previsto un procedimento per tentativi
ed errori.
Se gli studenti sono frustrati e hanno bisogno di ulteriore assistenza, chiedi loro di ribadire l'obiettivo del progetto.
- ChiediChiedi agli studenti quali dispositivi conoscono che potrebbero utilizzare un
sensore oculare? (Robot aspirapolvere, campanelli elettronici)
Se hanno difficoltà a stilare una lista, chiedete loro di elencare i dispositivi per i quali vorrebbero un sensore oculare.
- Esempio: vorrei installare un sensore oculare sulla porta sul retro, così ogni volta che il cane vuole uscire, il sensore oculare ci segnalerebbe che è alla porta.
Pausa a metà gioco & Discussione di gruppo
Non appena ogni gruppo ha creato un progetto utilizzando il sensore oculare e il blocco [Aspetta fino a], riunitevi per una conversazione.
Parliamo del flusso del progetto con il blocco [Attendi fino a].
- Perché era importante inserire il blocco [Aspetta fino a] all'inizio del progetto?
- Cosa succederebbe al flusso del nostro progetto se il blocco [Attendi fino a] si trovasse in un posto diverso?
- Il nostro braccio robotico funzionerebbe ancora come vorremmo?
Parte 2 - Passo dopo passo
- IstruisciIstruisci gli studenti che ripeteranno il loro progetto per far sì che il
braccio robotico attenda finché non viene rilevato un disco, sollevi il disco, sposti il disco in un'altra
parte della tessera, rilasci il disco e ritorni alla posizione di partenza. Guarda il video qui sotto per
vedere come il braccio robotico è riuscito a spostare il disco con successo, rilevandone prima il
movimento e poi sollevandolo per spostarlo in un'altra posizione utilizzando l'elettromagnete.
File video
- ModelloModello per gli studenti su come modificare il blocco [Spin for] per controllare
il motore del braccio.
-
Gli studenti devono aprire il loro progetto Lab 4 Parte 1 e rinominarlo Lab 4 Parte 2. Prima di iniziare, assicurarsi che gli studenti lo abbiano fatto collegato il proprio dispositivo al braccio robotico (2 assi) e che il Il braccio robotico è configurato.

Rinomina il progetto - Trascina il blocco [Spin for] nell'area di lavoro. Chiedete agli studenti se ricordano come passare da "base" a "braccio".
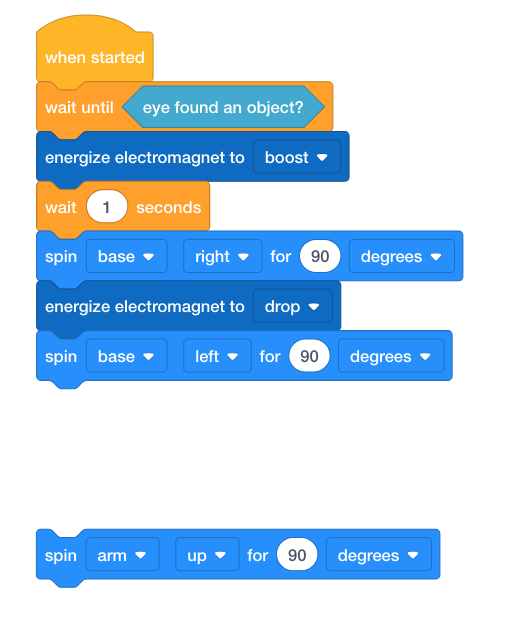
Aggiungi [Spin for] all'area di lavoro - Guarda l'animazione nella presentazione di immagini del Lab 4 e chiedi agli studenti dove sono necessari altri blocchi [Spin for] per muovere il braccio nel modo mostrato.
- Gli studenti possono utilizzare blocchi di commenti per ricordare a se stessi cosa succede in ogni fase del il processo è. Spiega che i commenti sono riservati solo al programmatore, non al robot; quindi non influenzeranno il flusso del progetto.

[Commento] blocco - Trascinare un blocco di commenti nell'area di lavoro e digitare uno dei passaggi nel blocco.
- Attendi che venga rilevato un disco
- Sollevare il disco
- Sposta il disco in un'altra parte della tessera
- Lascia cadere il disco
- Ritorna al punto di partenza
- Spiega che i commenti sono riservati solo al programmatore, non al robot; quindi non influenzeranno il flusso del progetto.
[Commento] blocco aggiunto - Chiedete agli studenti di posizionare un disco sull'elettromagnete e di avviare il progetto, osservando come si muove il braccio robotico. Dovrebbero avviare il progetto con un disco allegato l'Elettromagnete. Se necessario, vedere l'articolo Avvia un progetto in VEXcode GO, e modellare per gli studenti i passaggi descritti in questo articolo per avviare un progetto.
-
- FacilitareFacilitare le conversazioni sul flusso del progetto mentre gli studenti
iniziano a iterare sui loro progetti.

Il tuo braccio robotico dovrebbe... Fai domande come:
- Cosa pensi che accadrebbe se il blocco [Aspetta fino a] venisse aggiunto dopo aver avviato il motore del braccio? Come cambierebbe questo lo svolgimento del tuo progetto?
- Perché pensi che vogliamo che il braccio robotico ritorni alla posizione di partenza dopo aver lasciato il disco?
- In che modo i blocchi di commento possono aiutarti a comprendere il flusso del tuo progetto mentre scrivi il codice?
- Se volessi spostare un secondo disco in una posizione completamente nuova, quali altri blocchi dovresti aggiungere?
- RicordaRicorda ai gruppi di porre domande se sono confusi. Non tutti i tentativi
andranno a buon fine. Ogni volta che eseguono il progetto, gli studenti dovrebbero identificare cosa è
andato storto e fare un brainstorming di idee su come risolverlo. È previsto un procedimento per tentativi
ed errori.
Se gli studenti sono frustrati e hanno bisogno di ulteriore assistenza, chiedi loro di ribadire l'obiettivo del progetto.
Dovrebbero usare il loro progetto Lab 4 Parte 1 come guida.
La soluzione del Laboratorio 4 Parte 2 è disponibile anche come riferimento per gli insegnanti.

Lab 4 Parte 2 Soluzione - ChiediChiedi agli studenti quali altri compiti potrebbero essere in grado di completare utilizzando sia il motore del braccio che quello della base? E che dire di un braccio robotico più grande?