
Jouer
Partie 1 – Étape par étape
- InstruireDites aux élèves qu'ils vont créer un projet dans lequel le bras du robot
attend qu'un disque soit détecté (à l'aide du capteur oculaire), puis déplace le disque à l'aide de
l'électro-aimant. Regardez la vidéo ci-dessous pour voir comment le bras robotique peut déplacer le disque
avec succès en le détectant d'abord, puis en le faisant glisser vers la droite à l'aide de
l'électro-aimant.
Fichier vidéo
- ModèleModélisez comment construire un projet en utilisant le bloc [Attendre jusqu'à] et
le capteur oculaire. Demandez aux élèves de vous suivre sur un écran projeté ou via le diaporama du Lab 4.
- Avant de commencer, assurez-vous que les élèves ontconnecté leur appareil à leur bras robot (2 axes) et que le bras robot est configuré. Si nécessaire, modélisez les étapes de cet article Configurer un bras de robot pour guider les étudiants dans le processus de configuration de leur robot Bras.
Remarque : Lorsque vous connectez votre bras robotisé pour la première fois à votre appareil, le gyroscope intégré au cerveau peut s'étalonner, ce qui fait que le bras robotisé se déplace tout seul pendant un moment. Il s'agit d'un comportement attendu, ne touchez pas le bras du robot pendant l'étalonnage.
- Demandez aux élèves d’ouvrir leur projet Lab 3 Partie 2. Le nouveau projet s’appuiera sur ce projet. Sélectionnez « Enregistrer sous » ou « Enregistrer sur votre appareil » (selon la version de VEXcode GO que vous utilisez) et renommez le projet Lab 4 Partie 1.

Renommer le projet - S'il y a des élèves qui n'étaient pas présents au laboratoire 3 ou qui ne trouvent pas leur projet, demandez-leur de recréer la solution Lab 3 Partie 2 à partir du diaporama d'images du Lab 4.
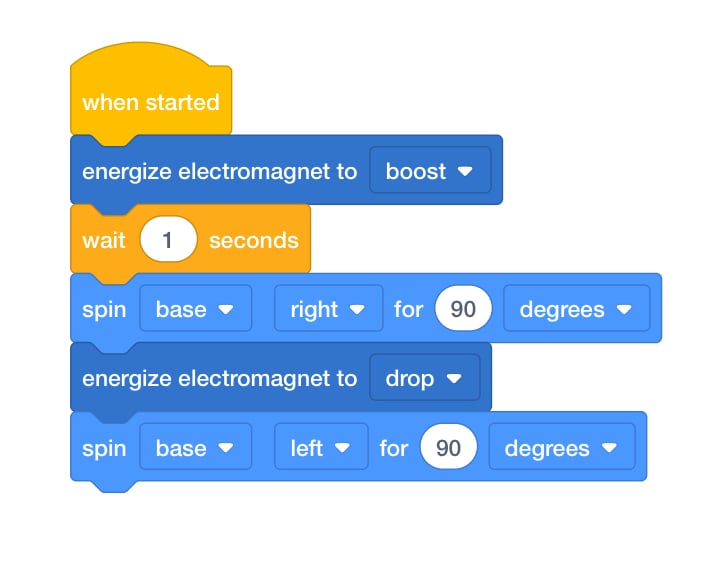
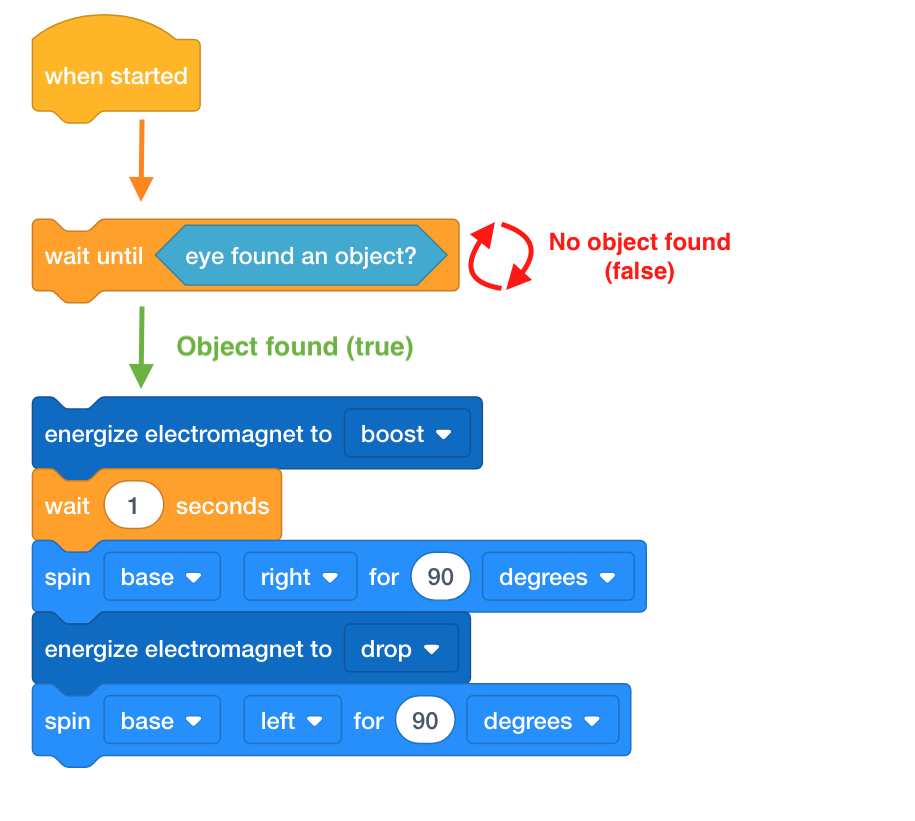
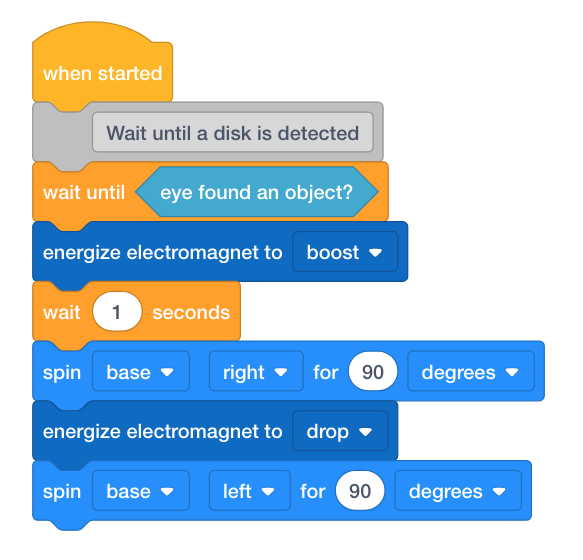
Lab 3 Partie 2 Solution - Faites glisser le bloc [Attendre jusqu'à] dans l'espace de travail. Expliquez que le bloc [Attendre jusqu'à] accepte les conditions booléennes et arrêtera l'exécution du projet jusqu'à ce que le bloc à l'intérieur signale une condition comme « Vrai ».
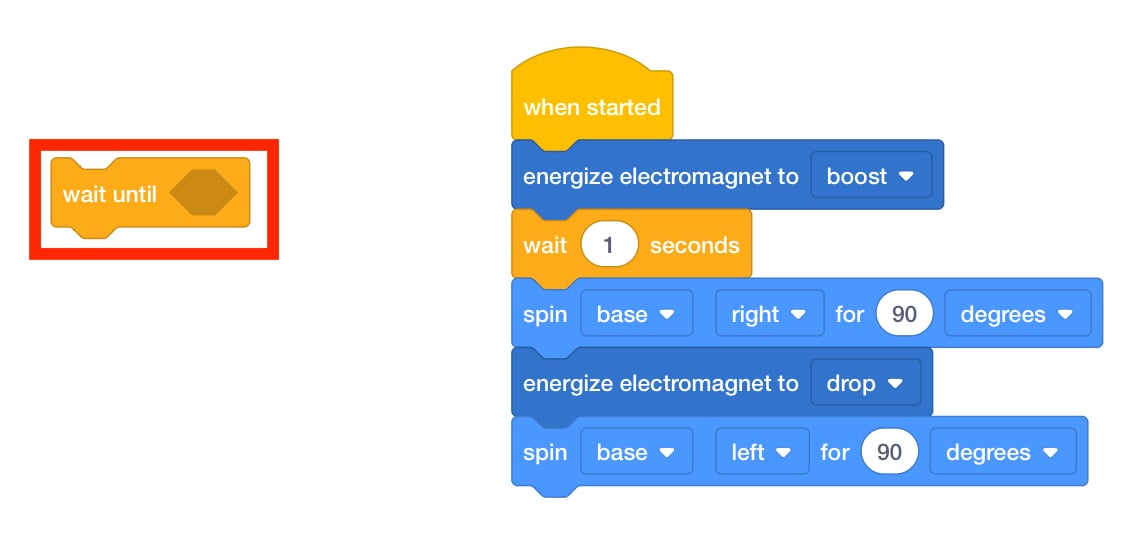
Ajouter Attendre jusqu'au bloc -
Ce projet utilisera le capteur oculaire pour détecter si un objet est présent, afin de le récupérer. Les données du capteur oculaire sont la condition booléenne que nous attendons.
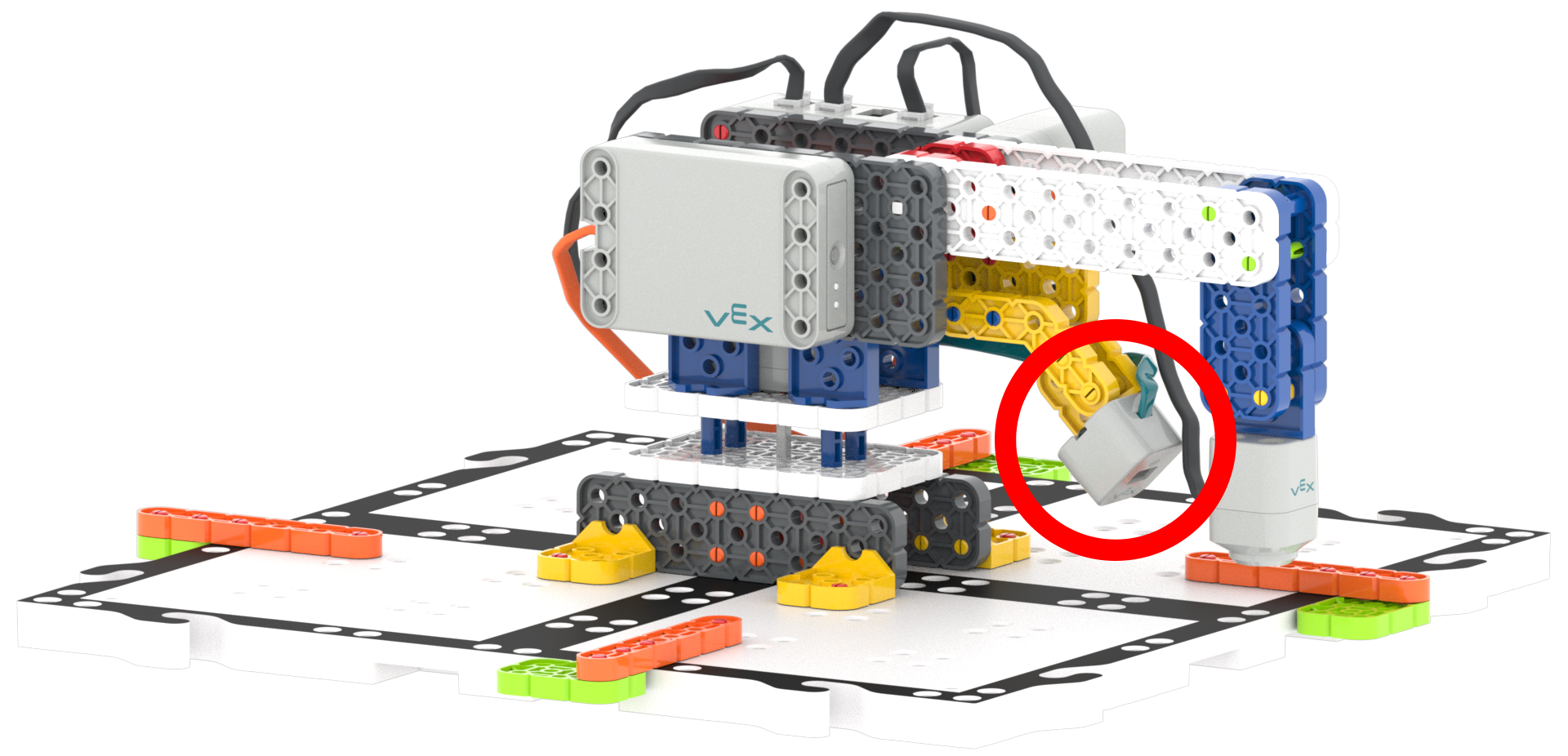
Capteur oculaire -
Recherchez le bloc <Objet trouvé par l'oeil> dans la boîte à outils sous « Détection ». Expliquez que le <Objet trouvé par l'oeil> est un bloc booléen qui signalera soit Vrai soit Faux, il peut donc être utilisé avec le bloc [Attendre jusqu'à].
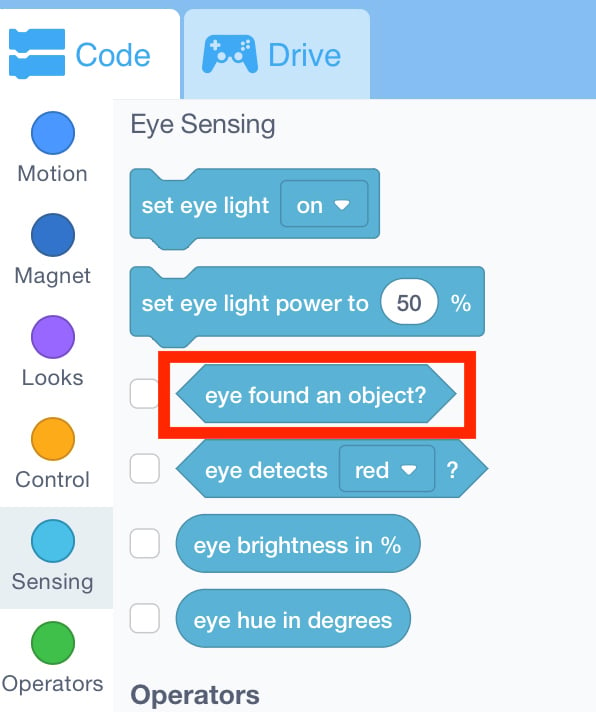
Détection oculaire Catégorie - Faites glisser le <Eye found object> dans le bloc [Attendre jusqu'à].
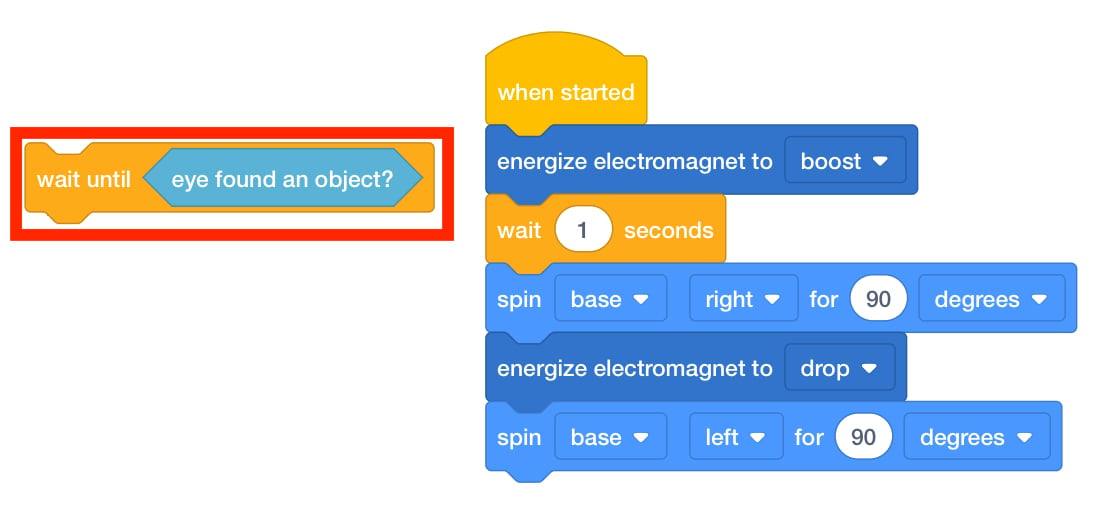
Ajouter <Objet trouvé par l'oeil> à [Attendre jusqu'à] - Demandez aux élèves ils veulent que le capteur oculaire vérifie la présence d’un objet. Faites glisser le bloc [Attendre jusqu'à] jusqu'au début du projet.
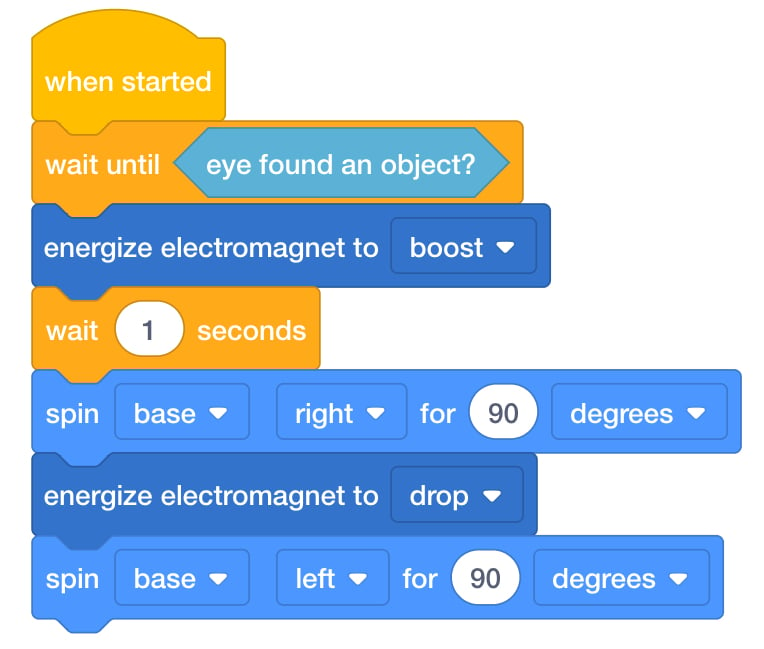
Lab 4 Partie 1 Solution - Demandez aux élèves de placer un disque sur l’électroaimant et de démarrer le projet et de voir comment leur bras robotique se déplace. Ils devraient démarrer le projet avec un disque attaché à l'électro-aimant. S’ils rencontrent des problèmes lors de l’utilisation du capteur oculaire, demandez-leur de suivre à nouveau ces étapes. Si besoin, consultez l'article Démarrer un projet dans VEXcode GO, et modéliser pour les étudiants les étapes de ce processus article pour démarrer un projet.
- FaciliterFaciliter les conversations sur le déroulement du projet pendant que les
élèves testent leur code. Utilisez la solution fournie dans le diaporama du Lab 4 pour vérifier leurs
projets au fur et à mesure de leur diffusion.
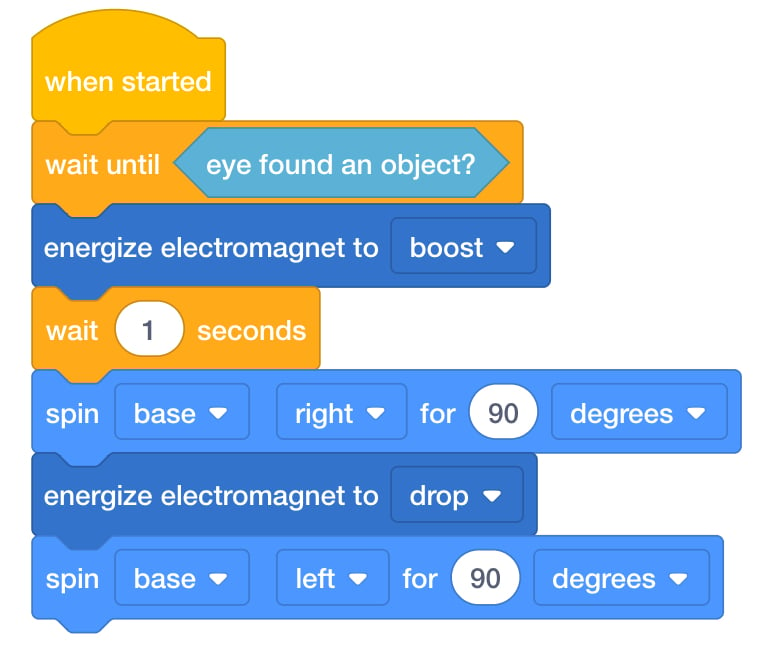
Lab 4 Partie 1 Solution Posez-leur certaines des questions suivantes pour susciter une discussion.
- Avec vos propres mots, comment expliqueriez-vous ce qu’est une condition booléenne ?
- Que pensez-vous qu'il se passerait si nous déplacions le bloc [Attendre jusqu'à] vers une autre partie du projet ? Comment le déroulement du projet changerait-il ?
- Si vous vouliez déplacer un deuxième disque à la fin du projet, quels autres blocs auriez-vous besoin d'ajouter ?
- En quoi ce projet est-il similaire ou différent du projet que vous avez réalisé dans le Lab 3 ?
- RappelerRappelez aux groupes de poser des questions s’ils sont confus. Toutes les
tentatives ne se dérouleront pas correctement. À chaque fois qu’ils exécutent le projet, les élèves
doivent identifier ce qui n’a pas fonctionné et réfléchir à des idées pour y remédier. Des essais et des
erreurs sont à prévoir.
Si les élèves sont frustrés et ont besoin d’aide supplémentaire, demandez-leur de vous rappeler l’objectif du projet.
- DemanderDemandez aux élèves quels appareils ils connaissent qui pourraient utiliser un
capteur oculaire ? (Robot aspirateur, sonnettes électroniques)
S’ils ont du mal à établir une liste, demandez-leur de dresser une liste d’appareils pour lesquels ils souhaiteraient un capteur oculaire.
- Exemple : je voudrais un capteur oculaire sur ma porte arrière afin que chaque fois que le chien souhaite sortir, le capteur oculaire nous indique que le chien est à la porte.
Pause à mi-jeu & Discussion de groupe
Dès que chaque groupe a créé un projet en utilisant le capteur oculaire et le bloc [Attendre jusqu'à], réunissez-vous pour une conversation.
Parlons du déroulement du projet avec le bloc [Attendre jusqu'à].
- Pourquoi était-il important de mettre le bloc [Attendre jusqu'à] au début du projet ?
- Qu'arriverait-il à notre flux de projet si le bloc [Attendre jusqu'à] était à un endroit différent ?
- Notre bras robotique fonctionnerait-il toujours comme nous le souhaitions ?
Partie 2 – Étape par étape
- InstruireDites aux élèves qu'ils vont itérer sur leur projet pour faire en sorte que le
bras du robot attende qu'un disque soit détecté, soulève le disque, déplace le disque vers une autre
partie de la tuile, dépose le disque et revienne à l'emplacement de départ. Regardez la vidéo ci-dessous
pour voir comment le bras robotisé pourrait déplacer le disque avec succès en détectant d'abord le disque,
puis en le soulevant pour le déplacer vers un autre emplacement à l'aide de l'électro-aimant.
Fichier vidéo
- ModèleModèle pour les élèves expliquant comment modifier le bloc [Spin for] pour
contrôler le moteur du bras.
-
Les étudiants doivent ouvrir leur projet Lab 4 Part 1 et le renommer Lab 4 Part 2. Avant de commencer, assurez-vous que les élèves ont connecté leur appareil à leur bras robot (2 axes) et que le Le bras du robot est configuré.

Renommer le projet - Faites glisser le bloc [Spin for] dans l’espace de travail. Demandez aux élèves s’ils se souviennent comment passer de la « base » au « bras ».
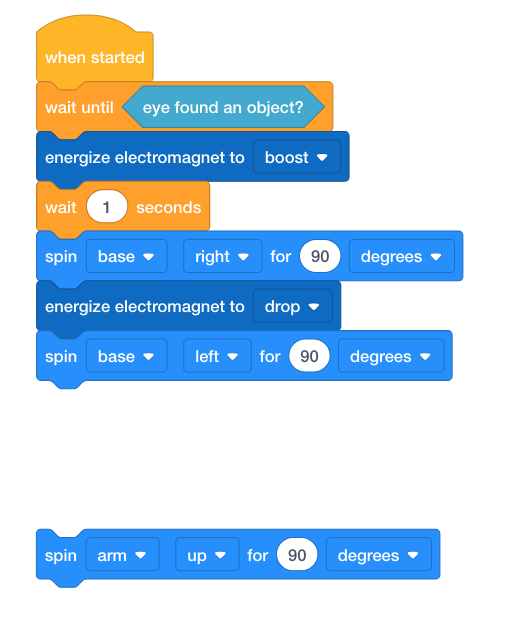
Ajouter [Spin for] à l'espace de travail - Regardez l'animation dans le diaporama d'images du laboratoire 4 et demandez aux élèves où des blocs [Spin for] supplémentaires sont nécessaires pour déplacer le bras de la manière indiquée.
- Les étudiants peuvent utiliser blocs de commentaires pour se rappeler ce que représente chaque étape du le processus est. Expliquez que les commentaires sont uniquement destinés au codeur, pas au robot ; ils n'affecteront donc pas le déroulement du projet.

[Commentaire] bloc - Modèle faisant glisser un bloc de commentaires dans l'espace de travail et saisissant l'une des
étapes dans le bloc.
- Attendez qu'un disque soit détecté
- Soulever le disque
- Déplacer le disque vers une autre partie de la tuile
- Déposez le disque
- Retournez à l'emplacement de départ
- Expliquez que les commentaires sont uniquement destinés au codeur, pas au robot ; ils n'affecteront donc pas le déroulement du projet.
[Commentaire] bloc ajouté - Demandez aux élèves de placer un disque sur l’électroaimant et de démarrer le projet et de voir comment leur bras robotique se déplace. Ils doivent démarrer le projet avec un disque connecté au Electro-aimant. Si besoin, voir l'article Démarrer un projet dans VEXcode GO, et modélisez pour les étudiants les étapes de cet article démarrer un projet.
-
- FaciliterFaciliter les conversations sur le déroulement du projet lorsque les élèves
commencent à itérer sur leurs projets.

Votre bras robotique devrait... Posez des questions telles que :
- Que pensez-vous qu'il se passerait si le bloc [Attendre jusqu'à] était ajouté après le démarrage du moteur du bras ? Comment cela changerait-il le déroulement de votre projet ?
- Pourquoi pensez-vous que nous voulons que le bras robotique revienne à l’emplacement de départ après avoir déposé le disque ?
- Comment les blocs de commentaires peuvent-ils vous aider à comprendre le flux de votre projet pendant que vous codez ?
- Si vous vouliez déplacer un deuxième disque vers un tout nouvel emplacement, quels autres blocs auriez-vous besoin d’ajouter ?
- RappelerRappelez aux groupes de poser des questions s’ils sont confus. Toutes les
tentatives ne se dérouleront pas correctement. À chaque fois qu’ils exécutent le projet, les élèves
doivent identifier ce qui n’a pas fonctionné et réfléchir à des idées pour y remédier. Des essais et des
erreurs sont à prévoir.
Si les élèves sont frustrés et ont besoin d’aide supplémentaire, demandez-leur de vous rappeler l’objectif du projet.
Ils devraient utiliser leur projet Lab 4 Partie 1 comme guide.
La solution Lab 4 Partie 2 est également disponible pour référence pour l'enseignant.

Lab 4 Partie 2 Solution - DemandezDemandez aux élèves quelles autres tâches ils pourraient être en mesure d’accomplir en utilisant à la fois le moteur du bras et le moteur de base ? Et pourquoi pas un bras robotique plus gros ?