
Fundo
Nesta Unidade, os alunos aprenderão sobre os recursos do VEX GO, através da construção da Base de Código e suas iterações para navegar de diferentes maneiras. Ao progredir da condução da Base de Código via controle remoto, no Modo de Condução, para a condução via código, para a condução usando dados do sensor, os alunos serão capazes de estruturar sua compreensão dos componentes e funções do VEX GO e VEXcode GO.
Quais recursos estão disponíveis no VEXcode GO?
O VEXcode GO é a plataforma de codificação baseada em blocos para o VEX GO. Para usar o VEXcode GO com o seu robô, terá de configurá-lo no seu dispositivo. Consulte o artigo Setting Up VEXcode GO VEX Library para obter mais informações, caso ainda não o tenha feito.
Dentro do VEXcode GO, existem muitos recursos que podem ser usados para apoiar os alunos à medida que aprendem sobre conceitos de codificação e STEM em toda a Unidade.
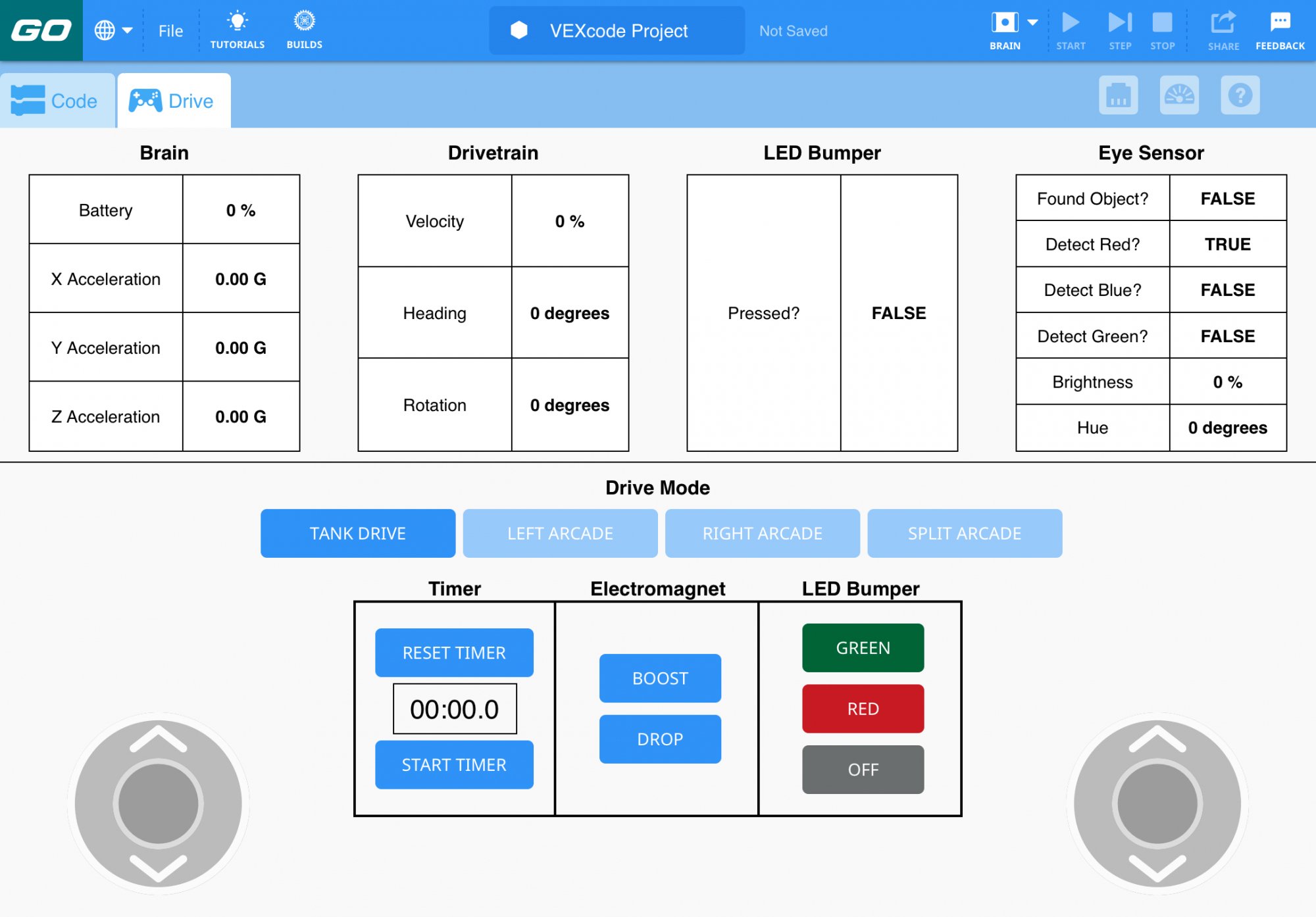
A guia Drive - Lab 1 apresenta aos alunos a condução da Base de Código usando o recurso de Controle Remoto, Modo Drive, localizado na guia Drive. O Modo Drive permite que os alunos comecem a dirigir sua Base de Código imediatamente quando conectam o Cérebro ao dispositivo, pois ele é pré-configurado para a Base de Código. Para obter informações mais detalhadas sobre como usar a guia Drive, consulte o artigo Usando o controle remoto no VEXcode GO VEX Library.
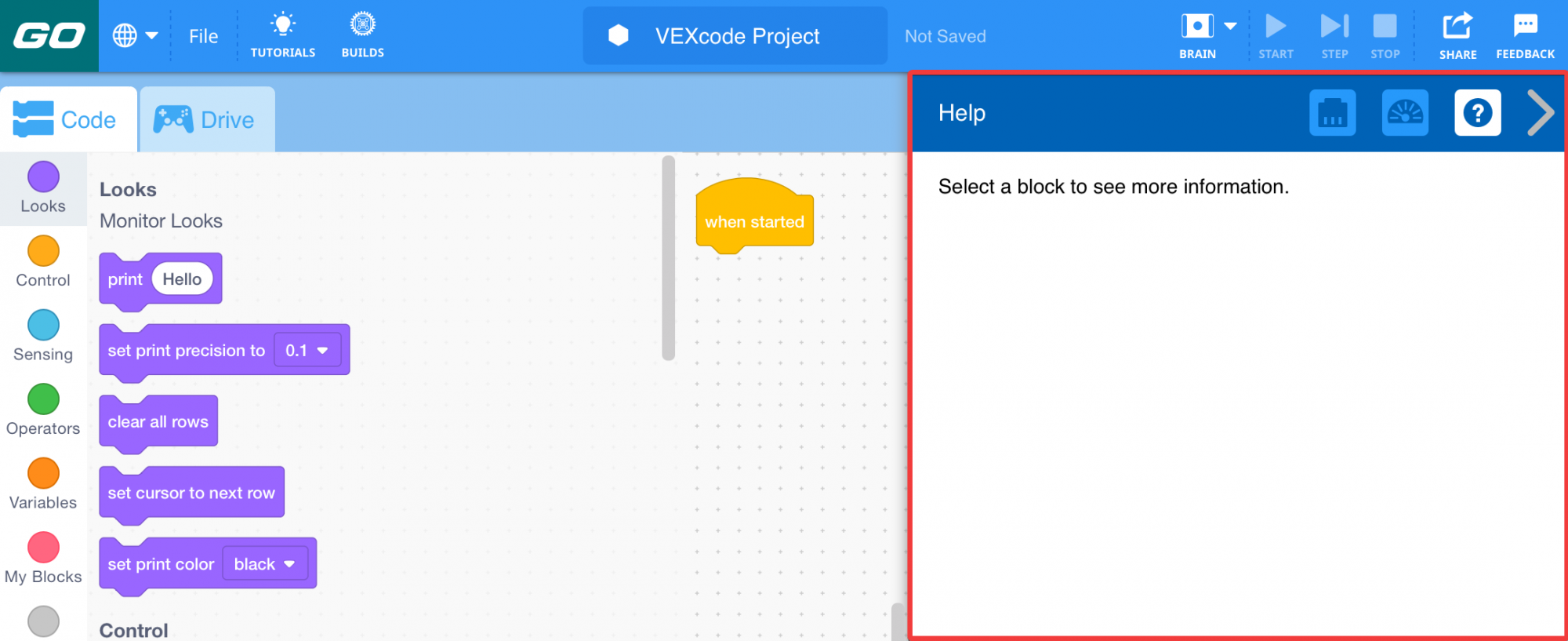
A Janela de Ajuda - O recurso de Ajuda do VEXcode GO pode ser usado para explicar mais sobre um bloco enquanto você está trabalhando no VEXcode GO. Basta abrir a Janela de Ajuda e selecionar o bloco sobre o qual deseja aprender. Os alunos podem usar este recurso enquanto trabalham, para ajudá-los a solucionar seus próprios projetos. Para obter mais informações sobre a Ajuda do VEXcode GO, consulte o artigo Accessing Help VEX Library.
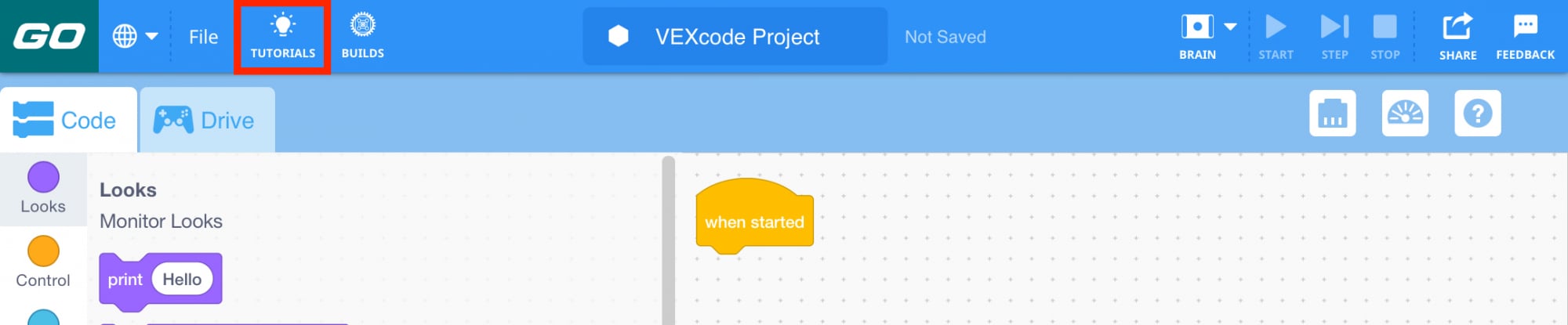
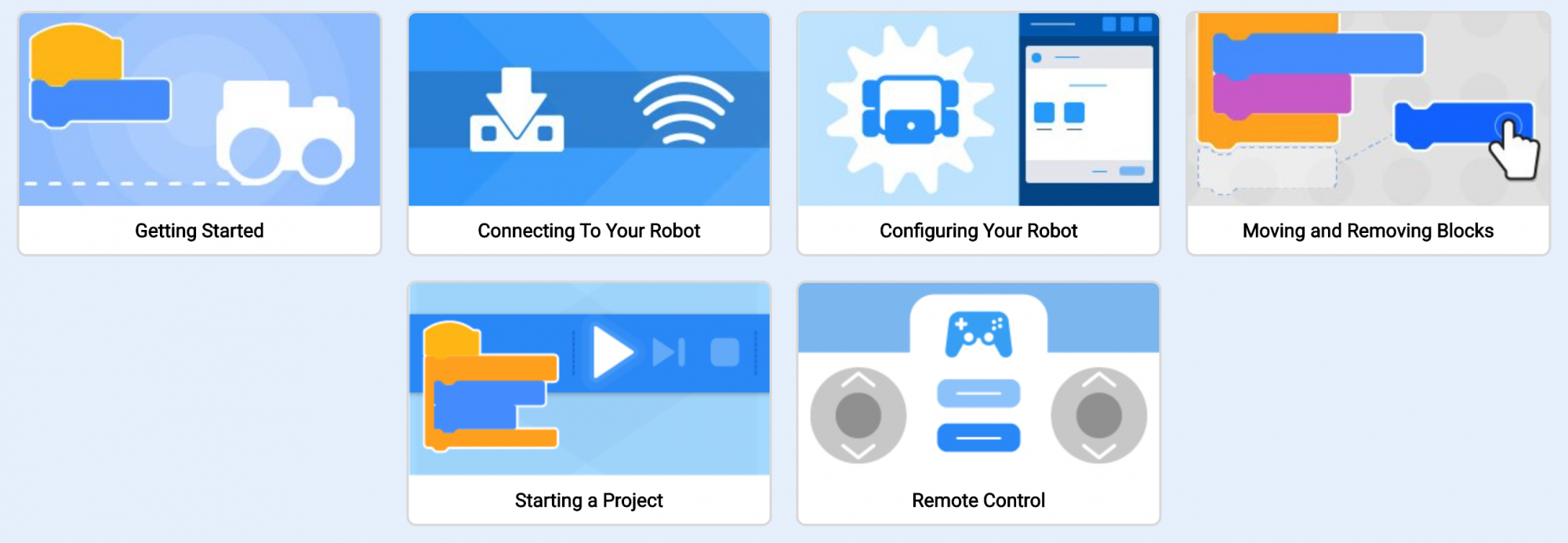
Os Tutoriais - Os Tutoriais são vídeos explicativos curtos que mostram como fazer coisas diferentes no VEXcode GO. Estão incorporados no VEXcode GO e podem ser visualizados selecionando "Tutoriais" na Barra de Ferramentas.
Você pode indicar aos alunos os vídeos tutoriais a qualquer momento, se eles precisarem de ajuda para fazer coisas como se conectar ao robô ou mover e remover blocos de um projeto. Lembrar os alunos de verificar os vídeos tutoriais para obter respostas às suas perguntas primeiro pode ajudar a liberar seu tempo para ajudar outros alunos que podem estar trabalhando em diferentes níveis.
 Vídeos
Vídeos Os Projetos de Exemplo - Estes são projetos que são incorporados ao VEXcode GO para mostrar diferentes maneiras de codificar seu robô. Eles são muitas vezes a base para o trabalho dos alunos nos Laboratórios STEM, como são nesta Unidade. Você também pode usar Projetos de Exemplo como um recurso de diferenciação para alunos que podem precisar de mais tempo para praticar um conceito de codificação específico ou para aqueles que podem iterar nele para explorar um conceito mais profundamente. Pode aceder aos Projetos de Exemplo a qualquer momento, selecionando o Menu Ficheiro e "Abrir Exemplos".
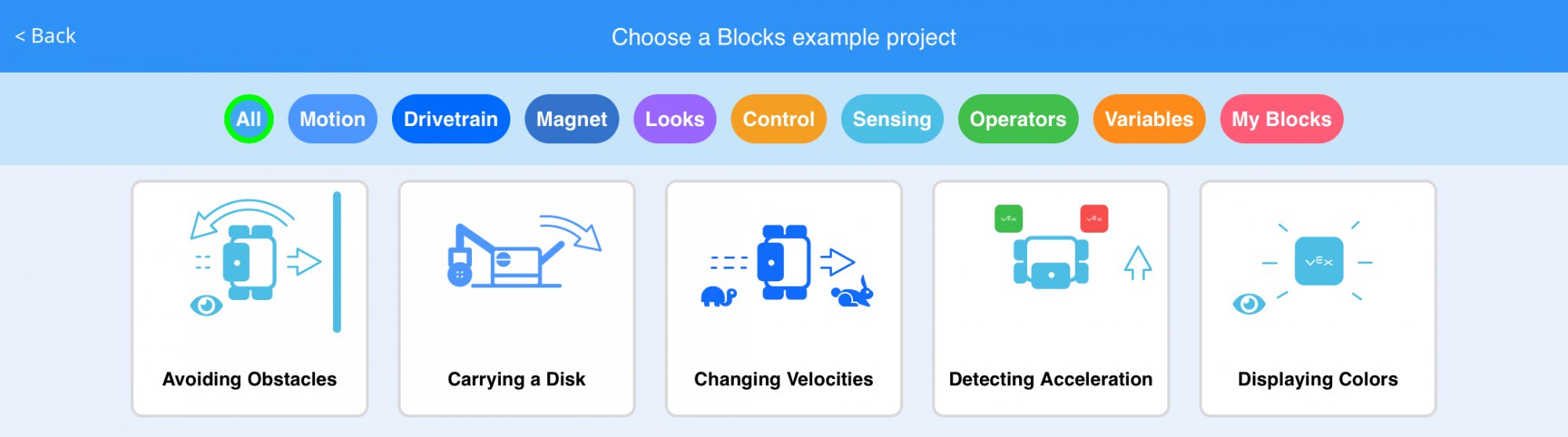 Projetos de
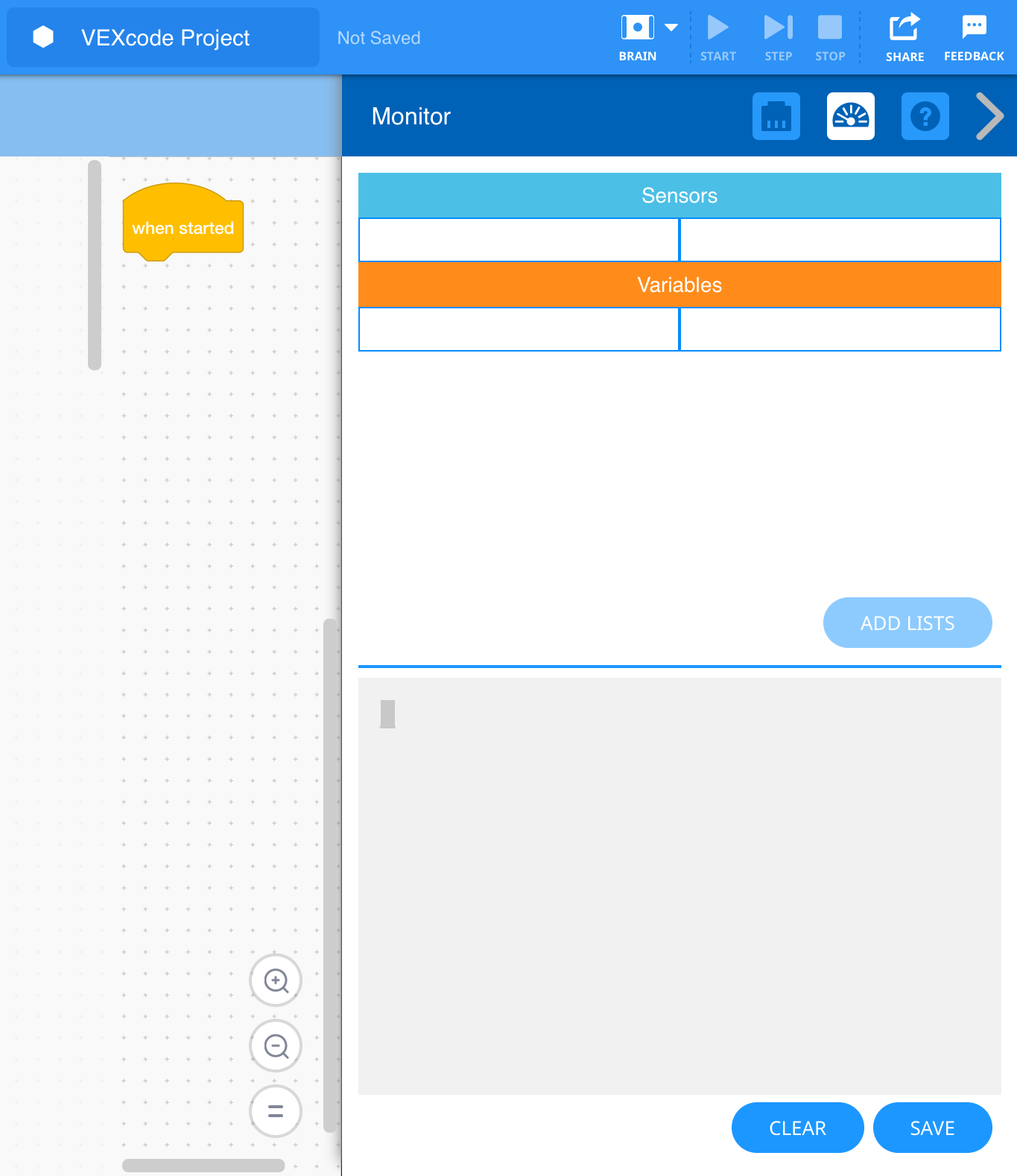
Projetos de A Janela do Monitor - A Consola do Monitor na Janela do Monitor oferece aos alunos uma forma diferente de ver o que está a acontecer num projeto, com um sensor ou com o seu robô em tempo real. No Laboratório 4 desta Unidade, o Console do Monitor é destacado como uma forma de mostrar aos alunos os dados que o Sensor Ocular relata, oferecendo-lhes uma conexão visual com as ações do sensor (que de outra forma não são visíveis). Para obter mais informações sobre esse recurso da janela Monitor, consulte o artigo Variable and Sensor Values Monitoring in VEXcode GO VEX Library.
O que é um sensor?
Um sensor é, em essência, um dispositivo que ajuda o robô a entender o mundo ao seu redor. Ele faz isso coletando e relatando dados sobre seu ambiente, que podem ser usados em um projeto para fazer com que o robô tome decisões ou execute determinados comportamentos. Esta sequência é muitas vezes referida como o ciclo de decisão do Sense → Think → Act.
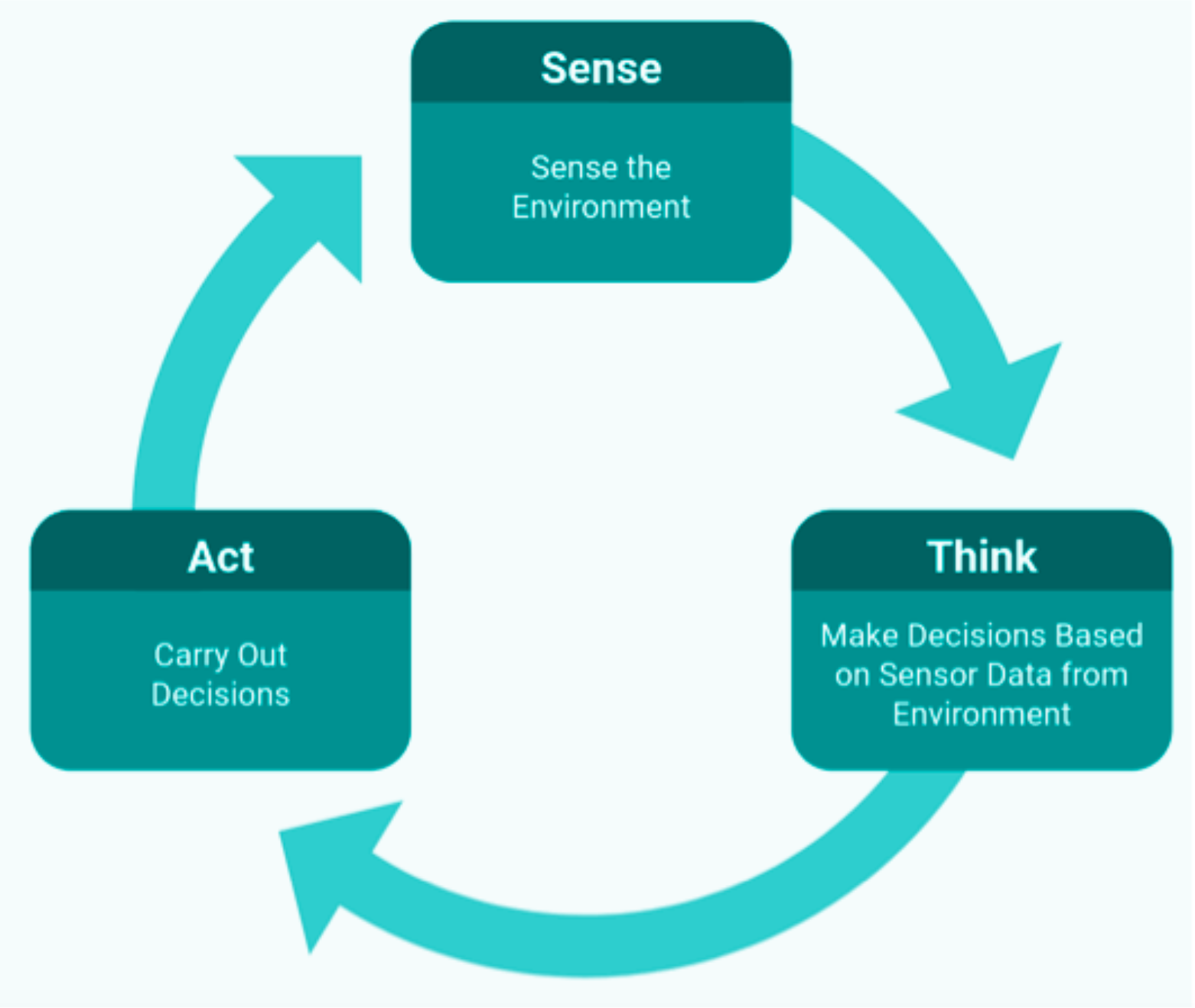 Loop de decisão → do
Loop de decisão → do No Laboratório 4, por exemplo, o Sensor de Olho é usado em um projeto para detectar a cor de um objeto (sentido), determinar a ramificação do projeto a seguir (pensar) e, em seguida, mover a Base de Código com base na cor (agir).
Quais sensores VEX GO são usados nesta unidade?
O Pára-choque de LED é um sensor que pode detectar o contato físico (se o Pára-choque de LED é pressionado ou liberado) e exibir cores (vermelho, verde ou desligado). Em projetos, pode ser utilizado como chave, onde a prensa ou liberação do Pára-choque de LED faz com que ocorra um comportamento, como é no Laboratório 3. Para obter informações mais detalhadas sobre como o Pára-choques de LED funciona, consulte o artigo Codificação com o Pára-choques de LED VEX GO.
O sensor ocular é um sensor que pode determinar três coisas - a presença de um objeto, sua cor e o brilho de um objeto ou superfície. No Laboratório 4 desta Unidade, o Sensor de Olhos é usado para detectar um objeto e sua cor para navegar em um Labirinto de Discos de Cores. Os dados relatados pelo Sensor Ocular podem ser vistos no Console do Monitor, que oferece aos alunos uma representação visual do que o robô está 'vendo' e pode ser usado para ajudá-los a fazer a conexão entre os sensores e os comportamentos do robô. Para obter mais informações sobre o sensor ocular e como ele funciona, consulte o artigo Coding with the VEX GO Eye Sensor VEX Library.