
ความเป็นมา
ในหน่วยการเรียนรู้นี้ นักเรียนจะได้เรียนรู้เกี่ยวกับคุณสมบัติของ VEX GO ผ่านการสร้าง Code Base และการวนซ้ำเพื่อนำทางในรูปแบบต่างๆ การพัฒนาจากการขับเคลื่อน Code Base ผ่านรีโมทคอนโทรล ในโหมดขับเคลื่อน ไปจนถึงการขับขี่ผ่านโค้ด ไปจนถึงการขับขี่โดยใช้ข้อมูลเซ็นเซอร์ นักเรียนจะสามารถสร้างความเข้าใจในส่วนประกอบและฟังก์ชันของ VEX GO และ VEXcode GO ได้
VEXcode GO มีฟีเจอร์อะไรบ้าง?
VEXcode GO เป็นแพลตฟอร์มการเข้ารหัสแบบบล็อกสำหรับ VEX GO เพื่อที่จะใช้ VEXcode GO กับหุ่นยนต์ของคุณ คุณจะต้องตั้งค่ามันบนอุปกรณ์ของคุณ ดูบทความ การตั้งค่า VEXcode GO VEX Library สำหรับข้อมูลเพิ่มเติม หากคุณยังไม่ได้ดำเนินการ
ภายใน VEXcode GO มีคุณสมบัติมากมายที่สามารถใช้เพื่อสนับสนุนนักเรียนในขณะที่พวกเขาเรียนรู้เกี่ยวกับการเขียนโค้ดและแนวคิด STEM ทั่วทั้งหน่วยการเรียนรู้
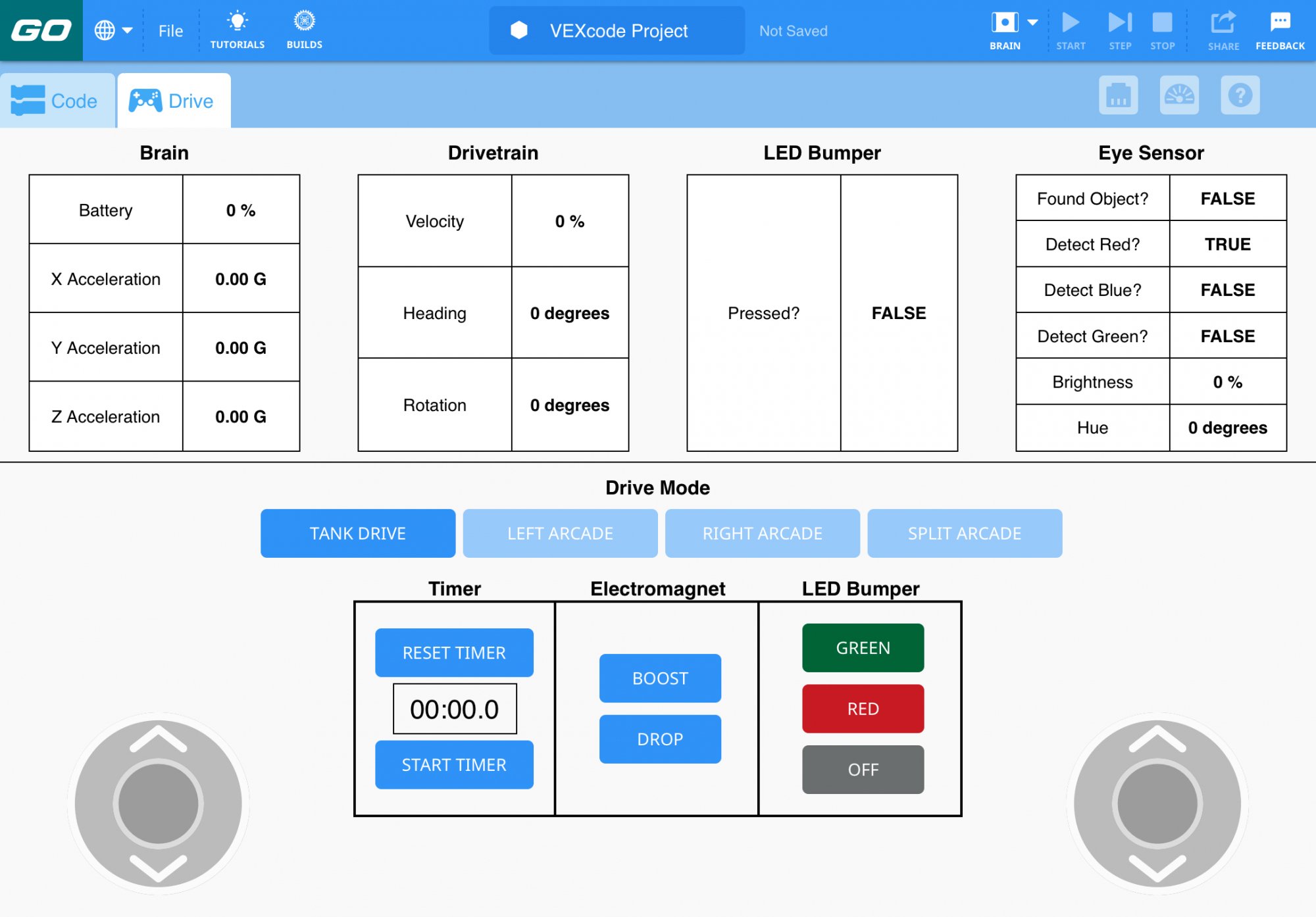
แท็บไดรฟ์ - แล็บ 1 แนะนำให้นักเรียนรู้จักการขับขี่ Code Base โดยใช้คุณสมบัติการควบคุมระยะไกล โหมดขับเคลื่อน ซึ่งอยู่ในแท็บไดรฟ์ โหมดขับเคลื่อนช่วยให้นักเรียนเริ่มขับเคลื่อน Code Base ได้ทันทีเมื่อเชื่อมต่อสมองเข้ากับอุปกรณ์ เนื่องจากมีการกำหนดค่าไว้ล่วงหน้าสำหรับ Code Base สำหรับข้อมูลโดยละเอียดเพิ่มเติมเกี่ยวกับการใช้แท็บไดรฟ์ โปรดดูบทความ การใช้รีโมทคอนโทรลใน VEXcode GO VEX Library
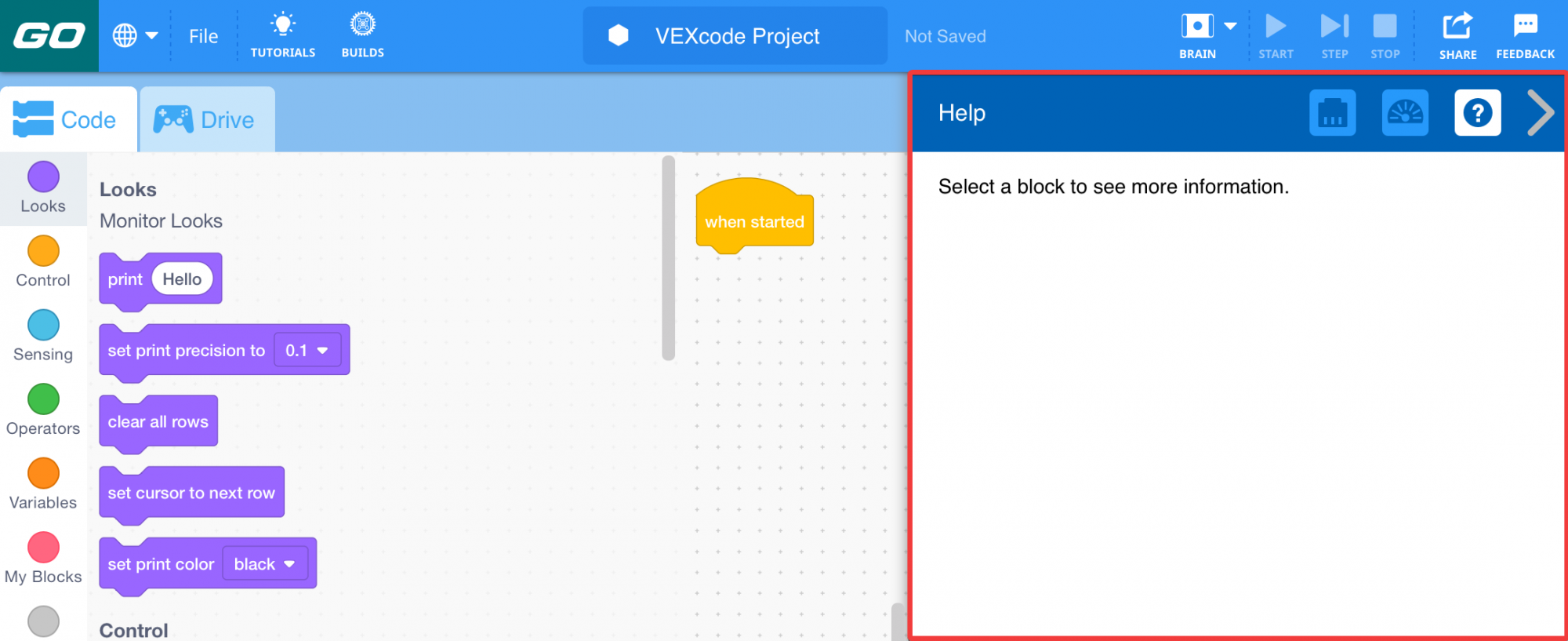
หน้าต่างวิธีใช้ - คุณลักษณะวิธีใช้ของ VEXcode GO สามารถใช้เพื่ออธิบายเพิ่มเติมเกี่ยวกับบล็อกในขณะที่คุณกำลังทำงานใน VEXcode GO เพียงเปิดหน้าต่างช่วยเหลือ และเลือกบล็อกที่คุณต้องการเรียนรู้ นักเรียนสามารถใช้ฟีเจอร์นี้ในขณะที่ทำงาน เพื่อช่วยแก้ไขปัญหาโปรเจ็กต์ของตนเอง สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีใช้ VEXcode GO โปรดดูบทความ การเข้าถึงความช่วยเหลือ VEX Library
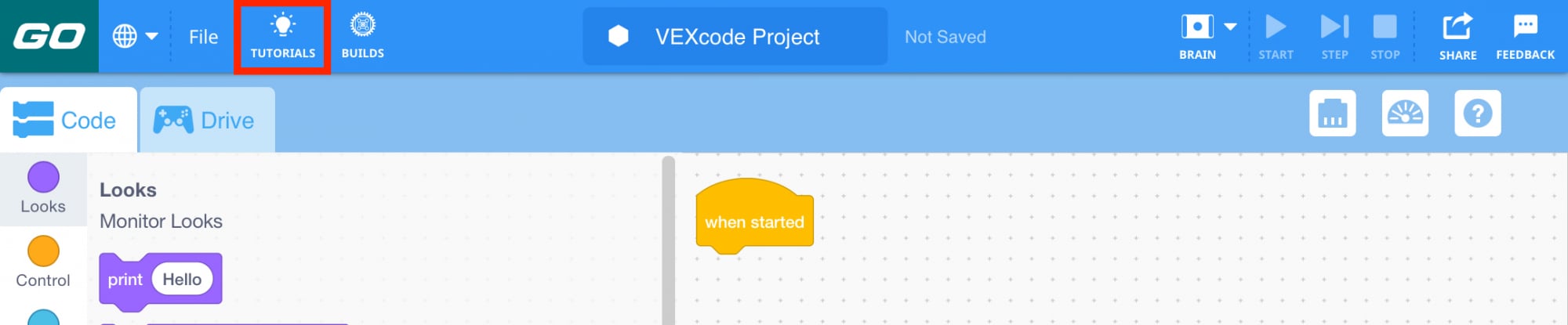
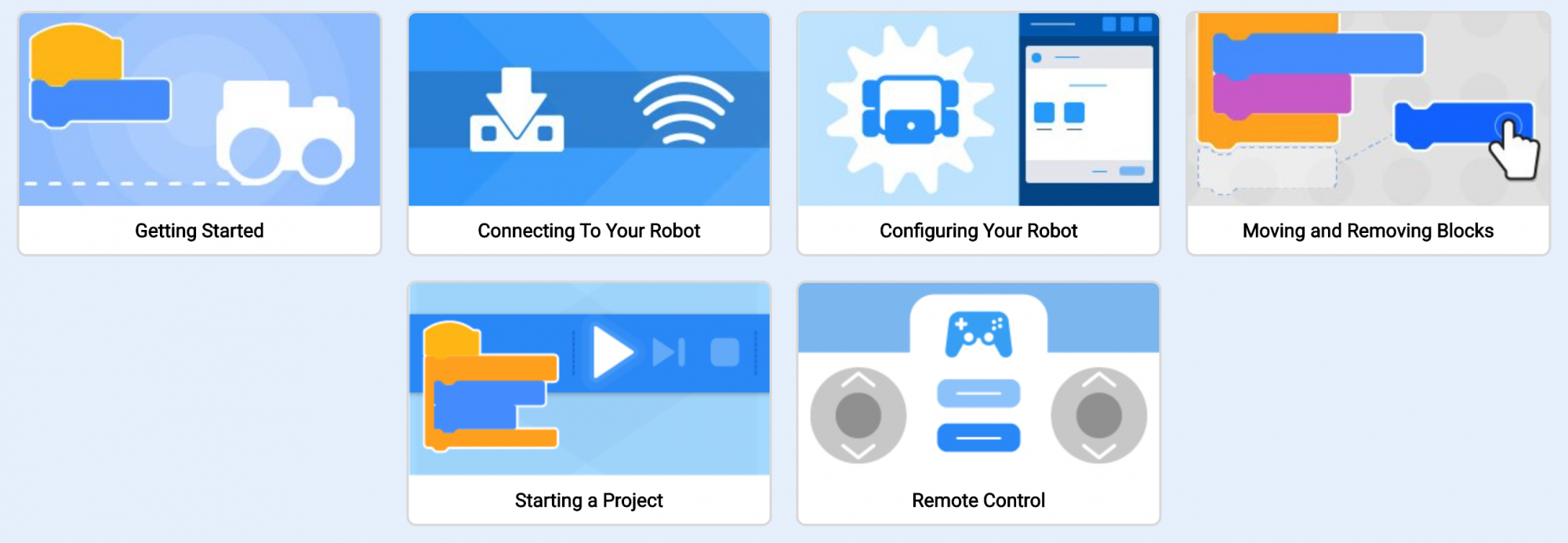
บทช่วยสอน - บทช่วยสอนเป็นวิดีโออธิบายสั้น ๆ ที่แสดงให้คุณเห็นถึงวิธีการทำสิ่งต่าง ๆ ใน VEXcode GO พวกมันถูกฝังอยู่ใน VEXcode GO และสามารถดูได้โดยการเลือก 'บทช่วยสอน' ในแถบเครื่องมือ
คุณสามารถชี้ให้นักเรียนดูวิดีโอแนะนำได้ตลอดเวลา หากพวกเขาต้องการความช่วยเหลือในการทำสิ่งต่างๆ เช่น เชื่อมต่อกับหุ่นยนต์หรือย้ายและนำบล็อกออกจากโครงการ เตือนให้นักเรียนตรวจสอบวิดีโอการสอนเพื่อหาคำตอบสำหรับคำถามของพวกเขาก่อน สามารถช่วยให้คุณมีเวลาว่างเพื่อช่วยเหลือนักเรียนคนอื่นๆ ที่อาจทำงานในระดับต่างๆ ได้
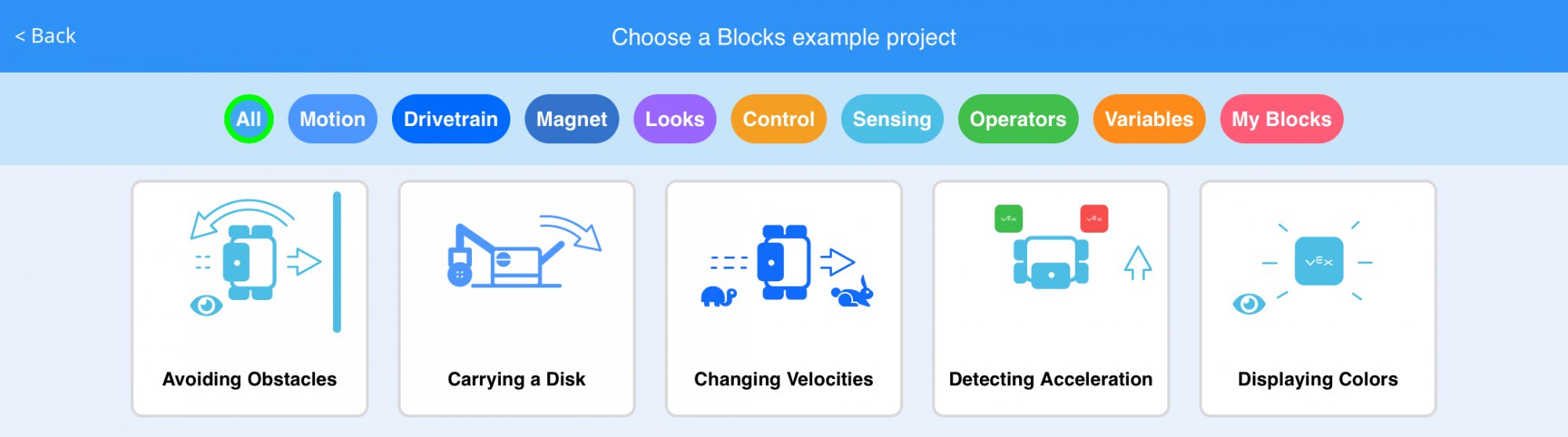
โปรเจ็กต์ตัวอย่าง - โปรเจ็กต์เหล่านี้ถูกสร้างขึ้นใน VEXcode GO เพื่อแสดงวิธีต่างๆ ในการเขียนโค้ดหุ่นยนต์ของคุณ สิ่งเหล่านี้มักจะเป็นพื้นฐานสำหรับงานของนักเรียนใน STEM Labs เช่นเดียวกับที่อยู่ในหน่วยนี้ คุณยังสามารถใช้โปรเจ็กต์ตัวอย่างเป็นแหล่งข้อมูลในการสร้างความแตกต่างสำหรับนักเรียนที่อาจต้องใช้เวลามากขึ้นเพื่อฝึกฝนแนวคิดการเขียนโค้ดเฉพาะ หรือสำหรับผู้ที่สามารถทำซ้ำเพื่อสำรวจแนวคิดที่ลึกซึ้งยิ่งขึ้น คุณสามารถเข้าถึงโครงการตัวอย่างได้ตลอดเวลาโดยเลือกเมนูไฟล์และ 'เปิดตัวอย่าง'
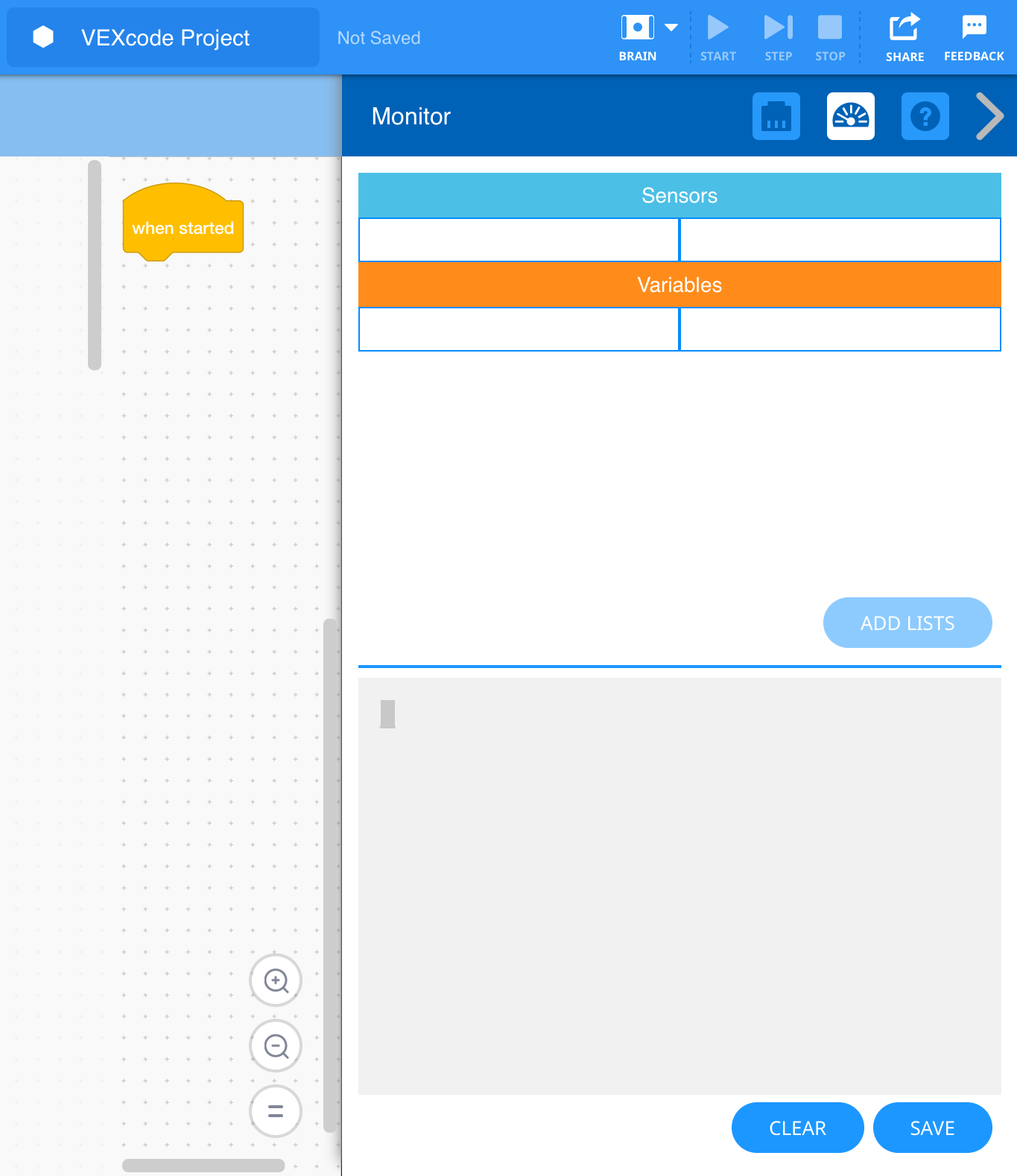
หน้าต่างจอภาพ - คอนโซลจอภาพในหน้าต่างจอภาพช่วยให้นักเรียนมีวิธีที่แตกต่างกันในการดูสิ่งที่เกิดขึ้นในโครงการ โดยใช้เซ็นเซอร์หรือกับหุ่นยนต์แบบเรียลไทม์ ในห้องทดลองที่ 4 ของหน่วยนี้ หน้าจอมอนิเตอร์คอนโซลถูกเน้นว่าเป็นวิธีหนึ่งที่จะแสดงข้อมูลที่เซ็นเซอร์ตารายงานให้กับนักเรียน โดยเสนอการเชื่อมต่อด้วยภาพกับการทำงานของเซ็นเซอร์ (ซึ่งอย่างอื่นจะมองไม่เห็น) สำหรับข้อมูลเพิ่มเติมเกี่ยวกับคุณลักษณะนี้ของหน้าต่างจอภาพ โปรดดูบทความ ตัวแปรและค่าเซ็นเซอร์การตรวจสอบใน VEXcode GO VEX Library
เซนเซอร์คืออะไร?
โดยพื้นฐานแล้วเซ็นเซอร์คืออุปกรณ์ที่ช่วยให้หุ่นยนต์เข้าใจโลกรอบตัว โดยการรวบรวมและรายงานข้อมูลเกี่ยวกับสภาพแวดล้อม ซึ่งสามารถนำมาใช้ในโครงการเพื่อให้หุ่นยนต์ตัดสินใจหรือดำเนินการพฤติกรรมบางอย่างได้ ลำดับนี้มักเรียกกันว่าลูปการตัดสินใจ Sense → Think → Act
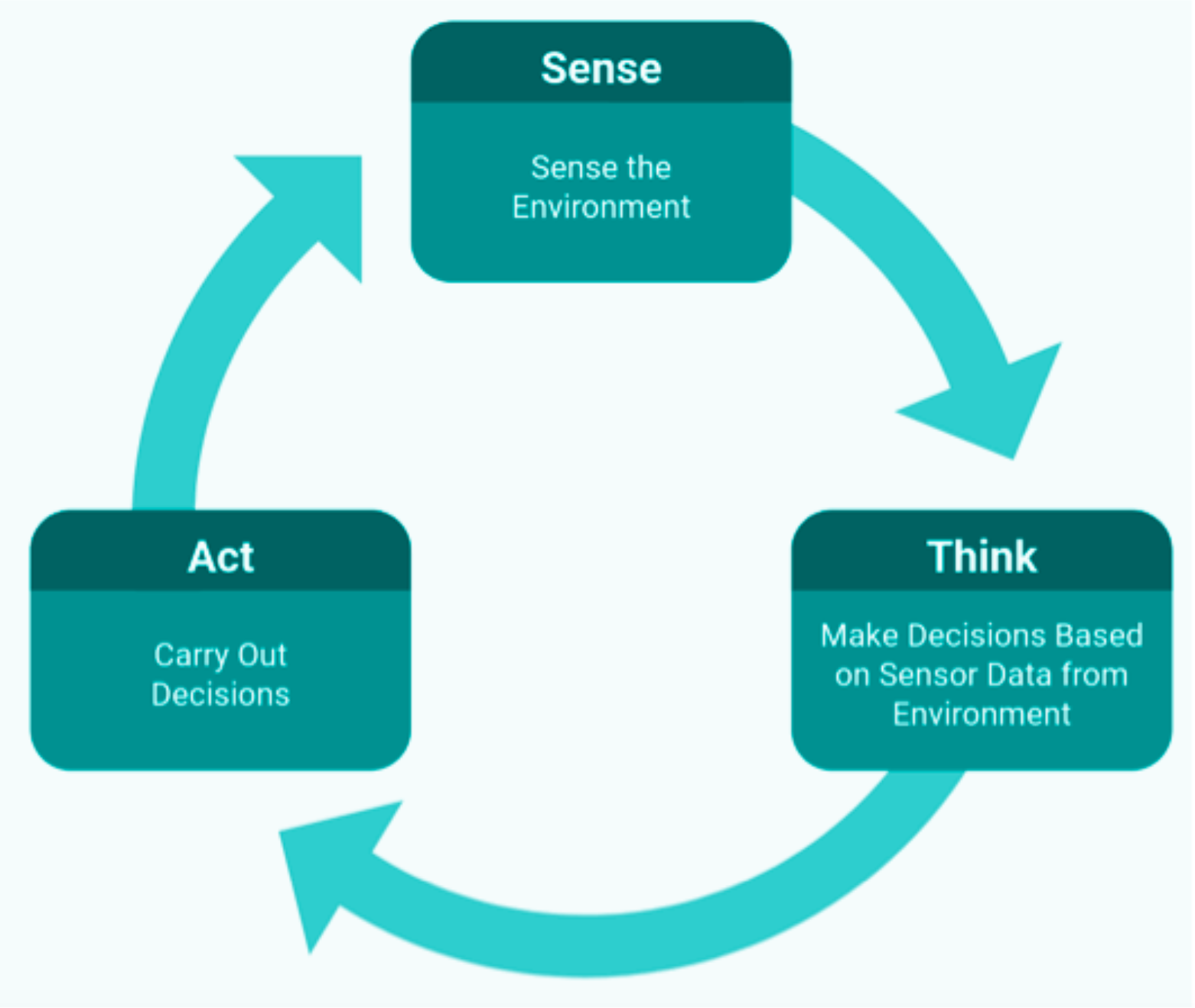
ตัวอย่างเช่น ใน Lab 4 Eye Sensor ถูกใช้ในโปรเจ็กต์เพื่อตรวจจับสีของวัตถุ (ประสาทสัมผัส) กำหนดสาขาของโปรเจ็กต์ที่จะติดตาม (คิด) จากนั้นจึงย้าย Code Base ตามสี (act) .
เซ็นเซอร์ VEX GO ใดที่ใช้ในยูนิตนี้
กันชน LED เป็นเซ็นเซอร์ที่สามารถตรวจจับการสัมผัสทางกายภาพ (ไม่ว่าจะกดหรือปล่อยกันชน LED) และสีที่แสดง (แดง เขียว หรือปิด) ในโปรเจ็กต์ สามารถใช้เป็นสวิตช์ได้ โดยที่การกดหรือปล่อยกันชน LED จะทำให้เกิดพฤติกรรม ขึ้น เช่นเดียวกับในแล็บ 3 สำหรับข้อมูลโดยละเอียดเพิ่มเติมเกี่ยวกับวิธีการทำงานของกันชน LED โปรดดูบทความ การเข้ารหัสด้วย VEX GO LED Bumper VEX Library
เซ็นเซอร์ตา เป็นเซ็นเซอร์ที่สามารถระบุสามสิ่ง ได้แก่ การมีอยู่ของวัตถุ สีของมัน และความสว่างของวัตถุหรือพื้นผิว ในห้องทดลองที่ 4 ของหน่วยนี้ เซ็นเซอร์ตาใช้ในการตรวจจับวัตถุและสีเพื่อนำทางใน Color Disk Maze ข้อมูลที่รายงานโดยเซ็นเซอร์ตาสามารถดูได้ใน Monitor Console ซึ่งให้นักเรียนเห็นภาพว่าหุ่นยนต์กำลัง 'มองเห็น' อะไร และสามารถใช้เพื่อช่วยให้พวกเขาเชื่อมโยงระหว่างเซ็นเซอร์และพฤติกรรมของหุ่นยนต์ . สำหรับข้อมูลเพิ่มเติมเกี่ยวกับ Eye Sensor และวิธีการทำงาน โปรดดูบทความ การเข้ารหัสด้วย VEX GO Eye Sensor VEX Library