
Fondo
En esta unidad, los estudiantes aprenderán sobre las características de VEX GO, mediante la construcción del código base y sus iteraciones para navegar de diferentes maneras. Al pasar de conducir Code Base mediante control remoto, en modo de conducción, a conducir mediante código y a conducir utilizando datos de sensores, los estudiantes podrán mejorar su comprensión de los componentes y funciones de VEX GO y VEXcode GO.
¿Qué funciones están disponibles en VEXcode GO?
VEXcode GO es la plataforma de codificación basada en bloques para VEX GO. Para utilizar VEXcode GO con su robot, deberá configurarlo en su dispositivo. Consulte el artículo Configuración de la biblioteca VEXcode GO VEX para obtener más información, si aún no lo ha hecho.
Dentro de VEXcode GO hay muchas funciones que se pueden utilizar para ayudar a los estudiantes a medida que aprenden sobre codificación y conceptos STEM a lo largo de la unidad.
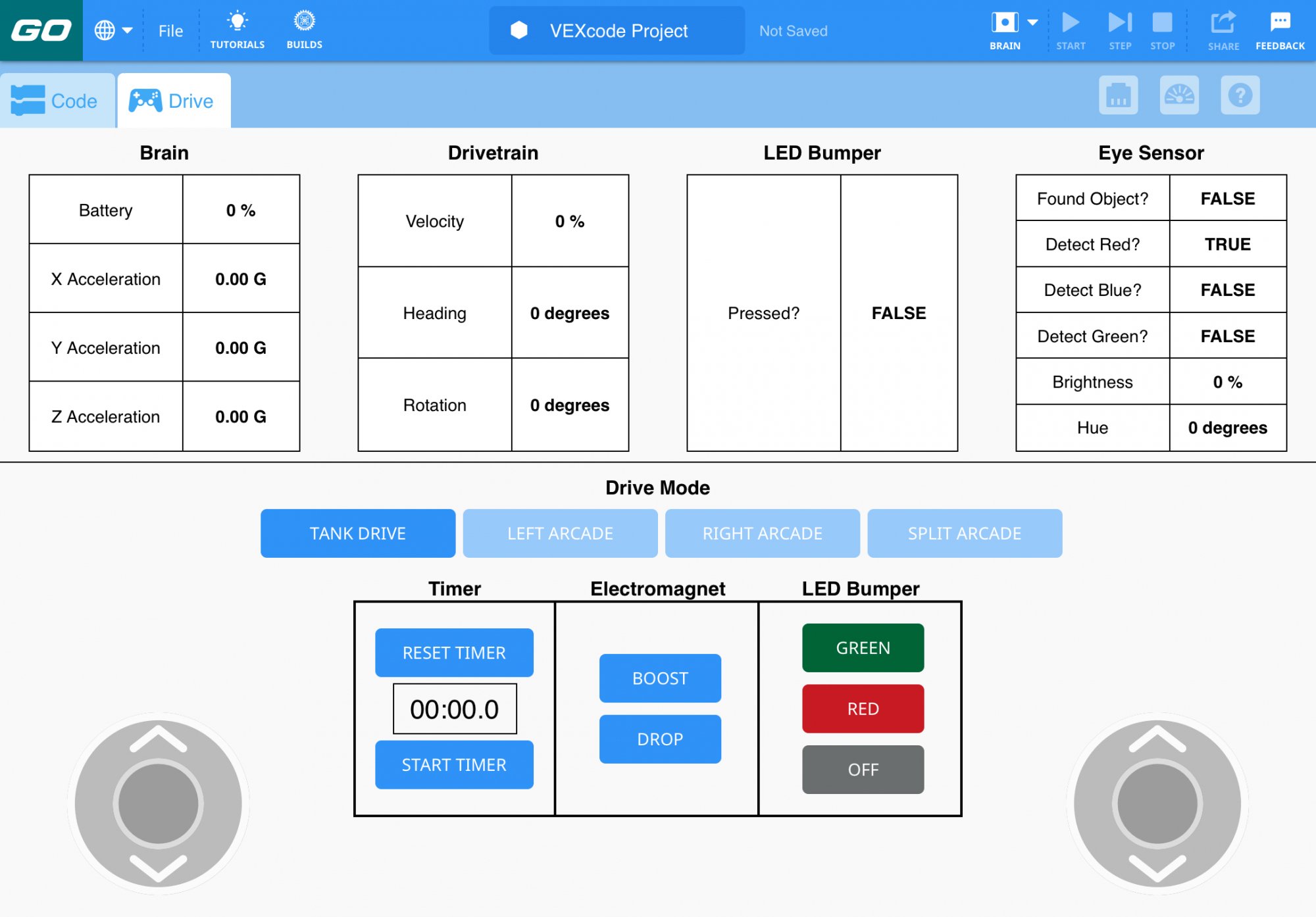
La pestaña Drive - Práctica de laboratorio 1 presenta a los estudiantes cómo manejar Code Base usando la función de control remoto, Modo Drive, ubicada en la pestaña Drive. El modo Drive permite a los estudiantes comenzar a manejar su Code Base inmediatamente cuando conectan su Brain a su dispositivo, ya que está preconfigurado para Code Base. Para obtener información más detallada sobre el uso de la pestaña Unidad, consulte el artículo Uso del control remoto en VEXcode GO Biblioteca VEX.
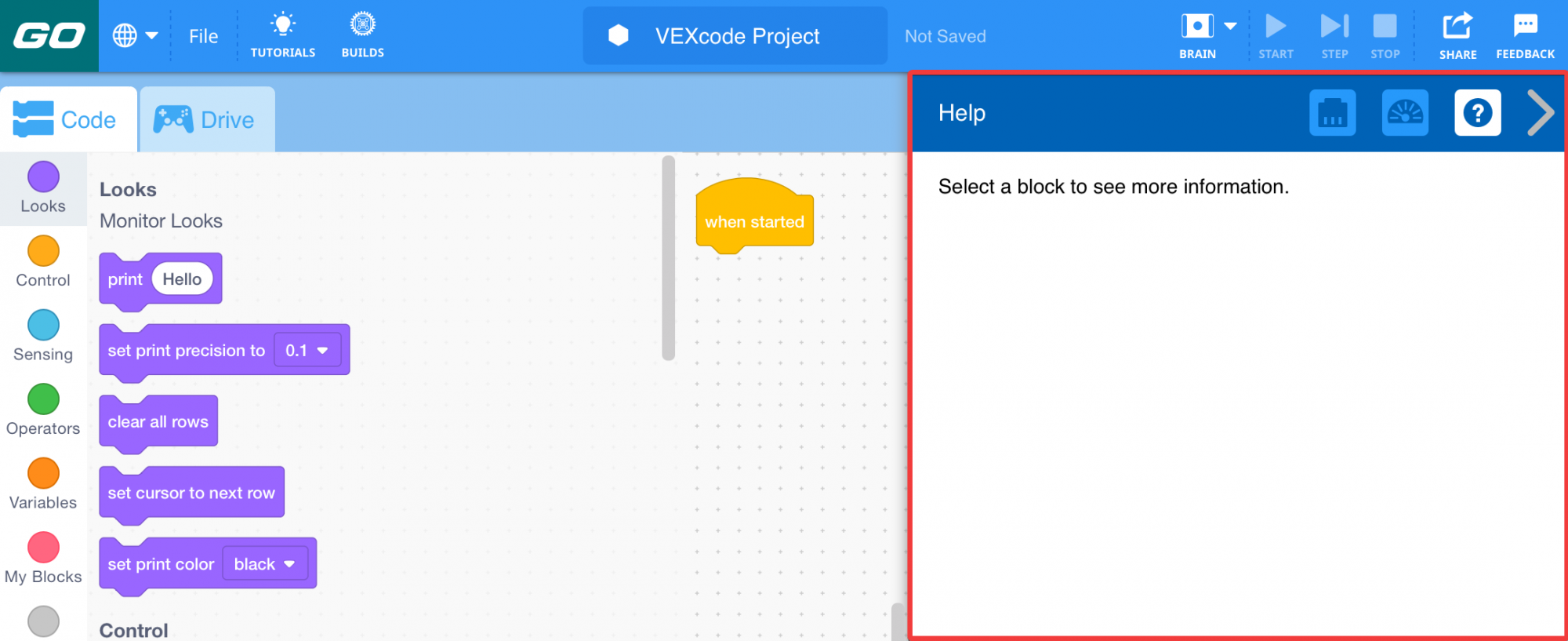
La ventana de ayuda : la función Ayuda de VEXcode GO se puede utilizar para explicar más sobre un bloque mientras trabaja en VEXcode GO. Simplemente abra la ventana de Ayuda y seleccione el bloque sobre el que desea obtener información. Los estudiantes pueden utilizar esta función mientras trabajan, para ayudarles a solucionar problemas en sus propios proyectos. Para obtener más información sobre la ayuda de VEXcode GO, consulte el artículo Acceso a la ayuda Biblioteca VEX.
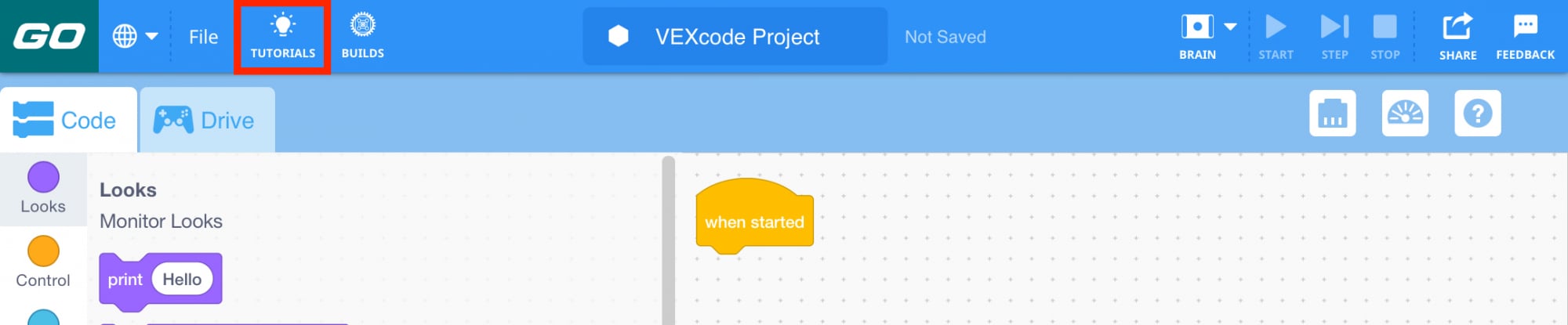
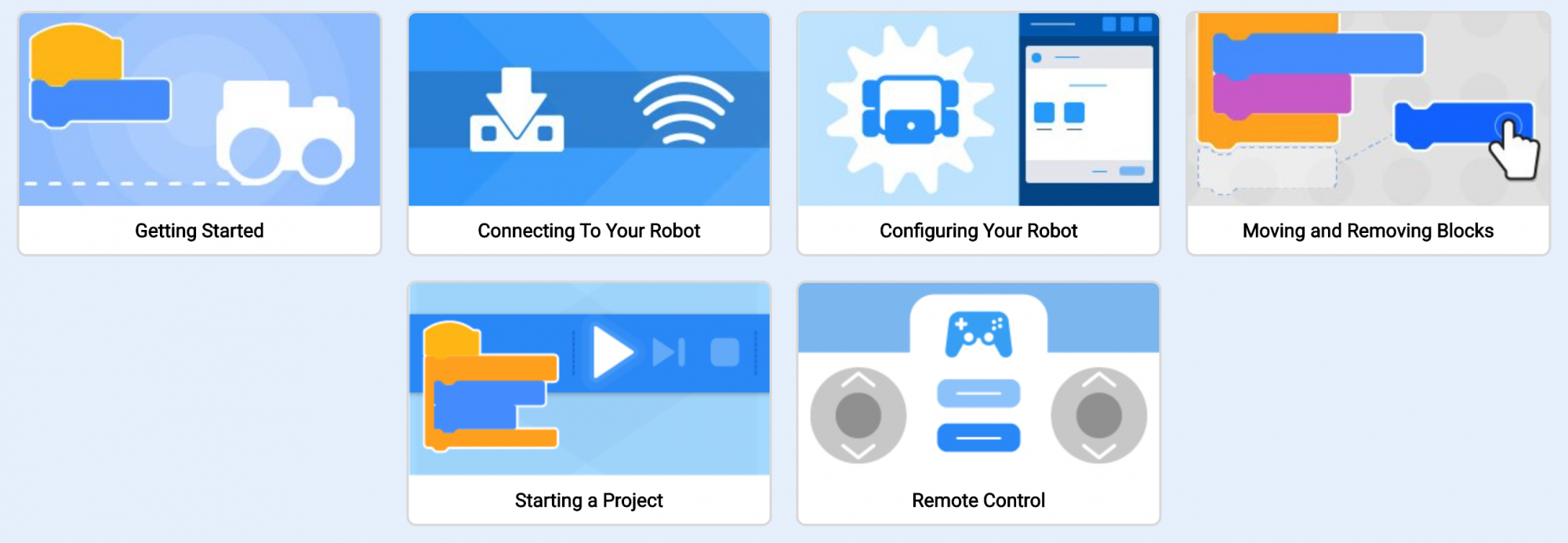
Los Tutoriales - Los Tutoriales son videos breves explicativos que le muestran cómo hacer diferentes cosas en VEXcode GO. Están integrados en VEXcode GO y se pueden ver seleccionando 'Tutoriales' en la barra de herramientas.
Puede indicarles a los estudiantes los videos tutoriales en cualquier momento, si necesitan ayuda para hacer cosas como conectarse a su robot o mover y quitar bloques de un proyecto. Recordarles a los estudiantes que primero revisen los videos tutoriales para obtener respuestas a sus preguntas puede ayudarlos a liberar tiempo para ayudar a otros estudiantes que puedan estar trabajando en diferentes niveles.
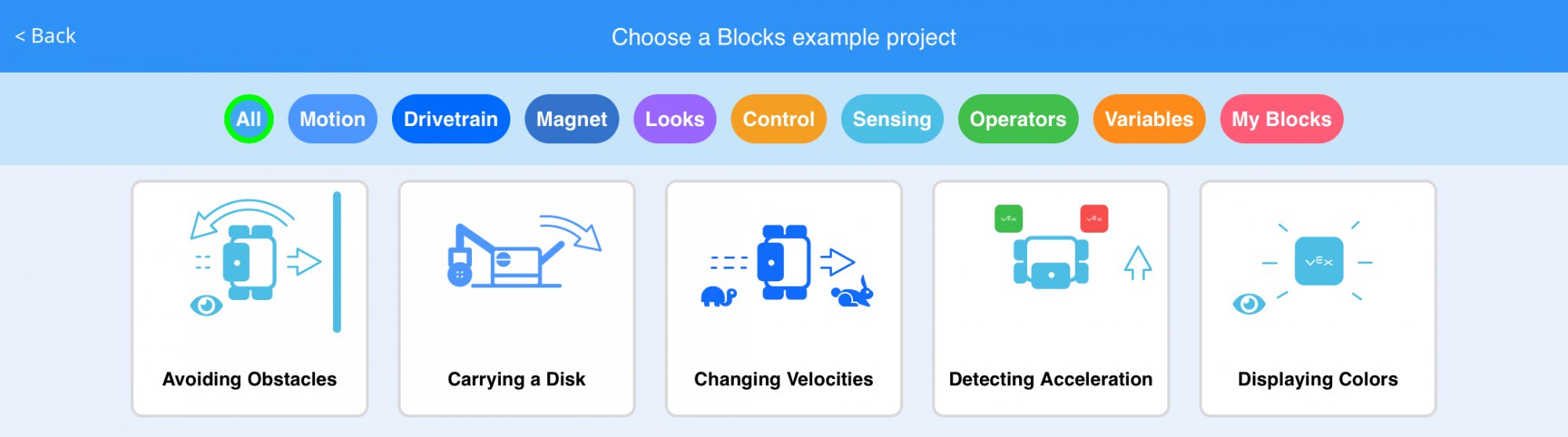
Los proyectos de ejemplo : estos son proyectos integrados en VEXcode GO para mostrar diferentes formas de codificar su robot. A menudo son la base para el trabajo de los estudiantes en los laboratorios STEM, como lo son en esta unidad. También puede utilizar Proyectos de ejemplo como recurso de diferenciación para los estudiantes que puedan necesitar más tiempo para practicar un concepto de codificación en particular, o para aquellos que pueden repetirlo para explorar un concepto más profundamente. Puede acceder a los proyectos de ejemplo en cualquier momento seleccionando el menú Archivo y "Abrir ejemplos".
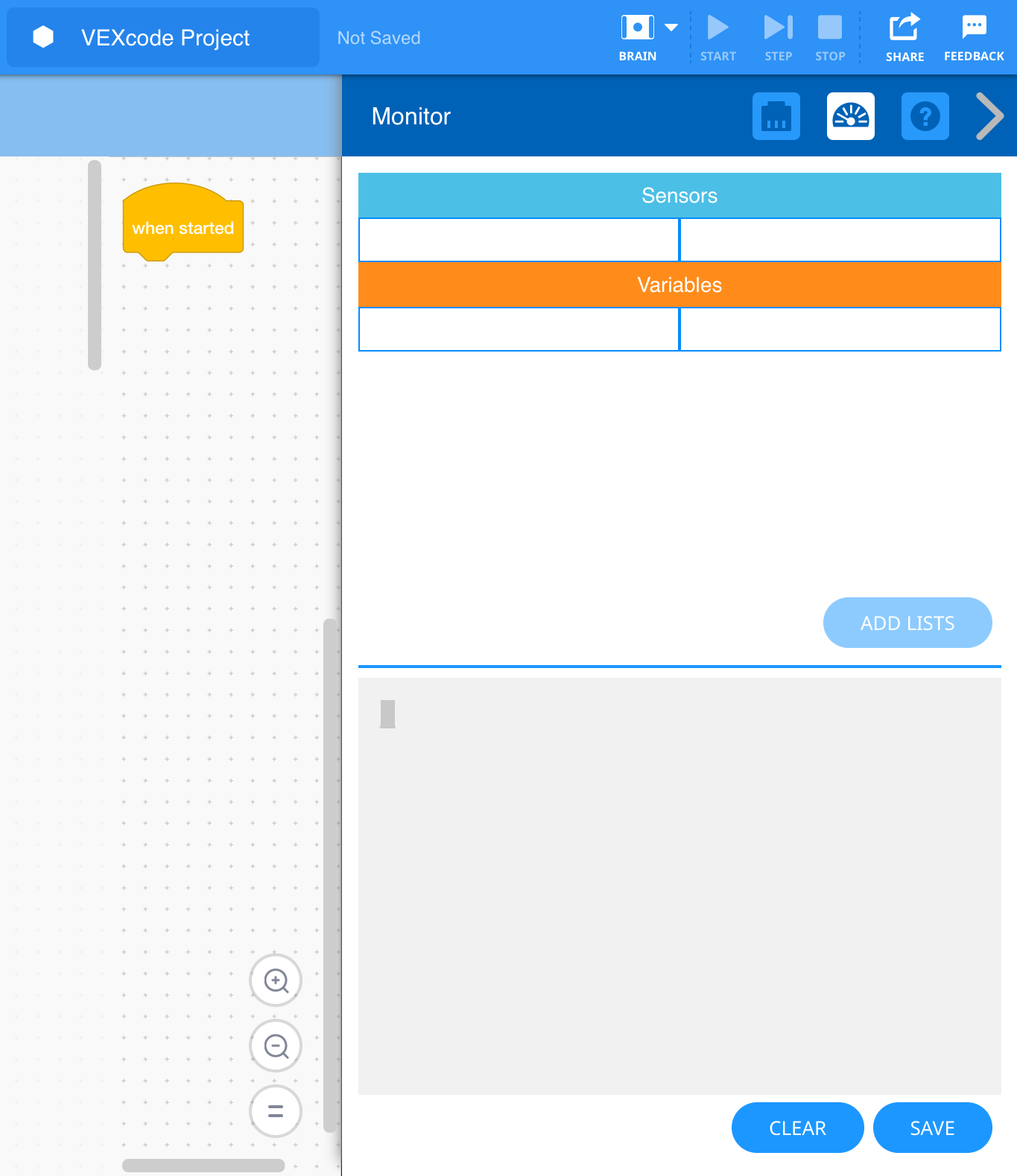
La Ventana Monitor - La Consola Monitor en la Ventana Monitor ofrece a los estudiantes una forma diferente de ver lo que está sucediendo en un proyecto, con un sensor o con su robot en tiempo real. En el Laboratorio 4 de esta unidad, la Consola del monitor se destaca como una forma de mostrar a los estudiantes los datos que informa el sensor ocular, ofreciéndoles una conexión visual con las acciones del sensor (que de otro modo no serían visibles). Para obtener más información sobre esta característica de la ventana Monitor, consulte el artículo Monitoreo de valores de sensores y variables en la biblioteca VEXcode GO VEX.
¿Qué es un sensor?
Un sensor es, en esencia, un dispositivo que ayuda al robot a comprender el mundo que lo rodea. Lo hace recopilando y reportando datos sobre su entorno, que luego pueden usarse en un proyecto para hacer que el robot tome decisiones o realice ciertos comportamientos. Esta secuencia a menudo se denomina bucle de decisión Sentir → Pensar → Actuar.
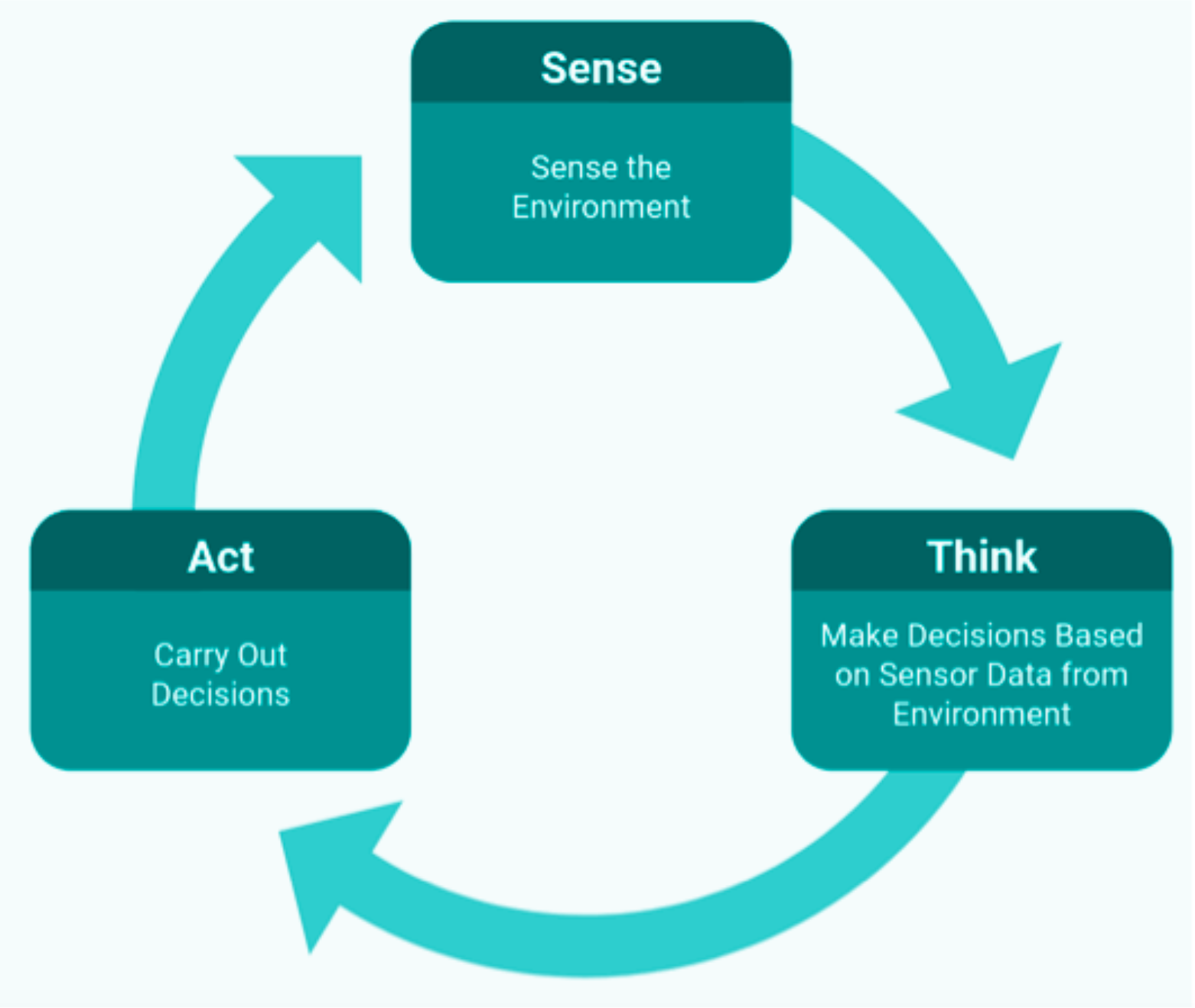
En el Laboratorio 4, por ejemplo, el sensor ocular se utiliza en un proyecto para detectar el color de un objeto (sentir), determinar la rama del proyecto a seguir (pensar) y luego mover el código base según el color (actuar). .
¿Qué sensores VEX GO se utilizan en esta unidad?
El LED Bumper es un sensor que puede detectar contacto físico (si se presiona o suelta el LED Bumper) y mostrar colores (rojo, verde o apagado). En proyectos, se puede utilizar como interruptor, donde al presionar o soltar el parachoques LED se produce un comportamiento , como ocurre en el Laboratorio 3. Para obtener información más detallada sobre cómo funciona el parachoques LED, consulte el artículo Codificación con el parachoques LED VEX GO Biblioteca VEX.
El Eye Sensor es un sensor que puede determinar tres cosas: la presencia de un objeto, su color y el brillo de un objeto o superficie. En el laboratorio 4 de esta unidad, el sensor ocular se utiliza para detectar un objeto y su color con el fin de navegar por un laberinto de discos de colores. Los datos reportados por el sensor ocular se pueden ver en la consola del monitor, que ofrece a los estudiantes una representación visual de lo que el robot está "viendo", y puede usarse para ayudarlos a establecer la conexión entre los sensores y los comportamientos del robot. . Para obtener más información sobre el sensor ocular y cómo funciona, consulte el artículo Codificación con el sensor ocular VEX GO Biblioteca VEX.