
Lý lịch
Trong Đơn vị này, học sinh sẽ tìm hiểu về các tính năng của VEX GO thông qua việc xây dựng Cơ sở mã và các lần lặp lại để điều hướng theo nhiều cách khác nhau. Bằng cách chuyển từ điều khiển Code Base thông qua điều khiển từ xa, ở Chế độ lái, sang điều khiển bằng mã, rồi lái xe bằng dữ liệu cảm biến, học sinh sẽ có thể củng cố hiểu biết của mình về các thành phần và chức năng của VEX GO và VEXcode GO.
VEXcode GO có những tính năng nào?
VEXcode GO là nền tảng mã hóa theo khối dành cho VEX GO. Để sử dụng VEXcode GO với robot của bạn, bạn sẽ cần thiết lập nó trên thiết bị của mình. Xem bài viết Thiết lập VEXcode GO Thư viện VEX để biết thêm thông tin, nếu bạn chưa thực hiện.
Trong VEXcode GO có nhiều tính năng có thể được sử dụng để hỗ trợ học sinh khi học về mã hóa và các khái niệm STEM trong suốt Đơn vị.
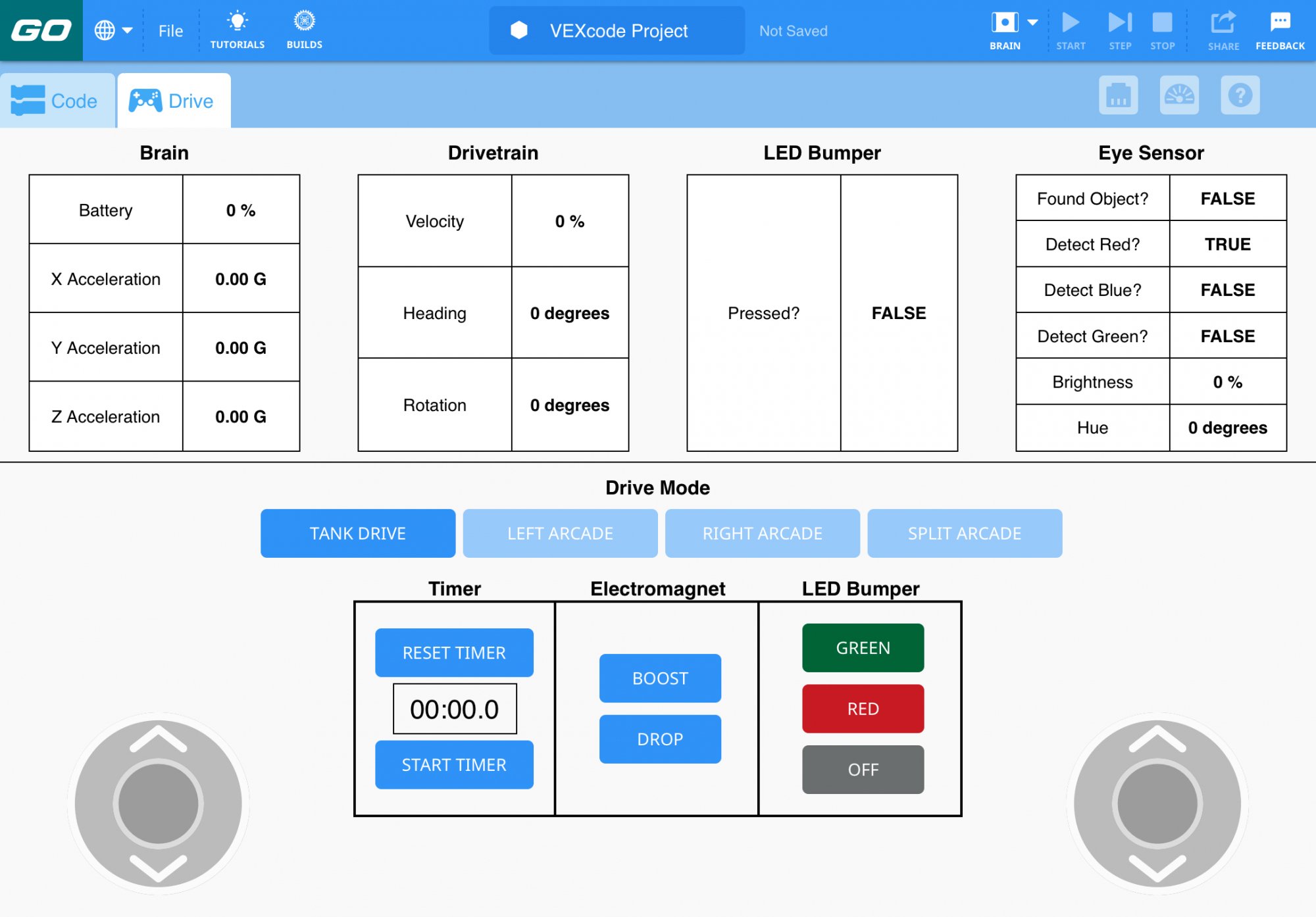
Tab Drive - Phòng thí nghiệm 1 giới thiệu cho sinh viên cách điều khiển Cơ sở mã bằng tính năng Điều khiển từ xa, Chế độ Drive, nằm trong Tab Drive. Chế độ Drive cho phép học sinh bắt đầu điều khiển Code Base ngay khi kết nối Brain với thiết bị của mình vì nó đã được cấu hình sẵn cho Code Base. Để biết thông tin chi tiết hơn về cách sử dụng Tab Drive, hãy xem bài viết Sử dụng điều khiển từ xa trong Thư viện VEXcode GO.
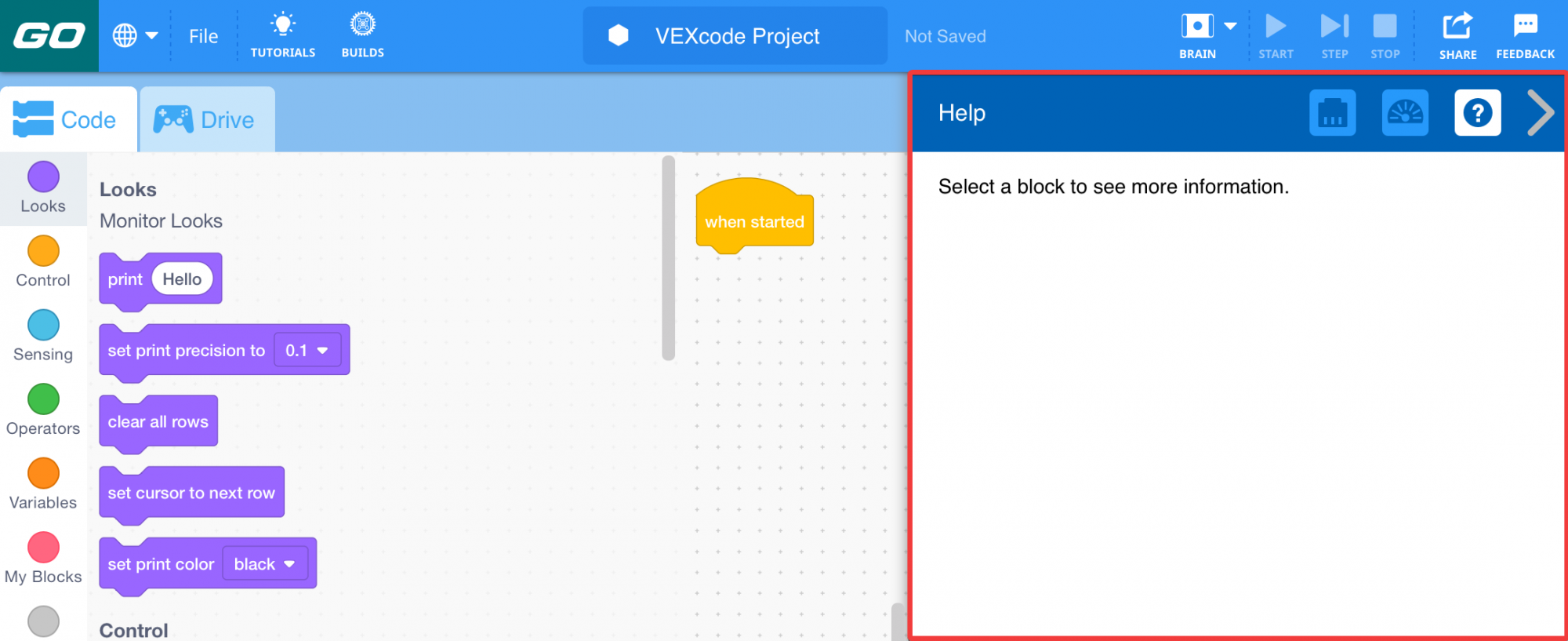
Cửa sổ Trợ giúp - Tính năng Trợ giúp của VEXcode GO có thể được sử dụng để giải thích thêm về một khối khi bạn đang làm việc trong VEXcode GO. Chỉ cần mở Cửa sổ Trợ giúp và chọn khối bạn muốn tìm hiểu. Học sinh có thể sử dụng tính năng này khi đang làm việc để giúp họ khắc phục sự cố trong dự án của mình. Để biết thêm thông tin về Trợ giúp VEXcode GO, hãy xem bài viết Truy cập Trợ giúp Thư viện VEX.
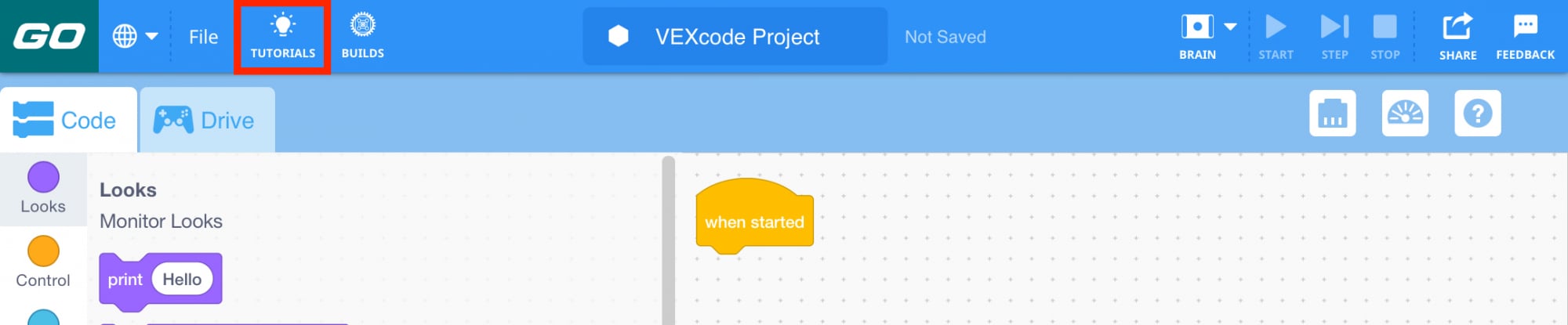
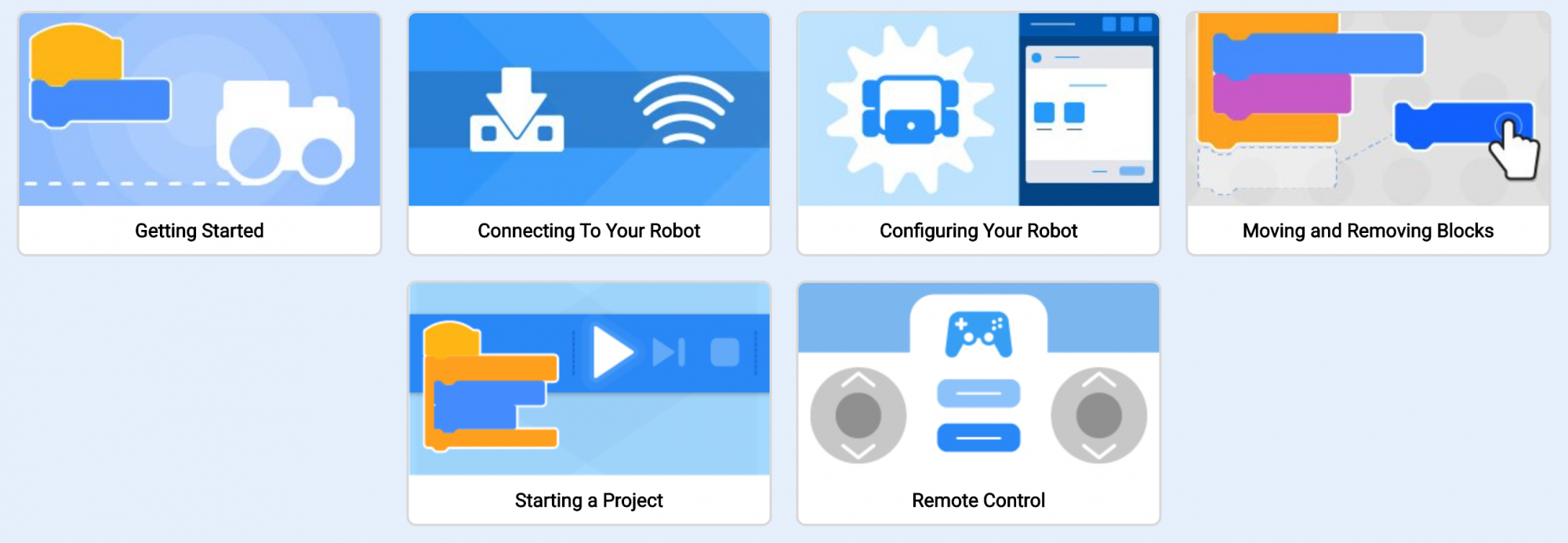
Hướng dẫn - Hướng dẫn là những video giải thích ngắn cho bạn biết cách thực hiện nhiều thao tác khác nhau trong VEXcode GO. Chúng được nhúng trong VEXcode GO và có thể xem bằng cách chọn 'Hướng dẫn' trên Thanh công cụ.
Bạn có thể hướng dẫn học sinh xem video hướng dẫn bất cứ lúc nào nếu các em cần trợ giúp để thực hiện những việc như kết nối với rô-bốt hoặc di chuyển và loại bỏ các khối khỏi một dự án. Nhắc nhở học sinh xem video hướng dẫn để tìm câu trả lời cho câu hỏi của mình trước có thể giúp bạn có thêm thời gian để giúp đỡ những học sinh khác đang học ở các trình độ khác nhau.
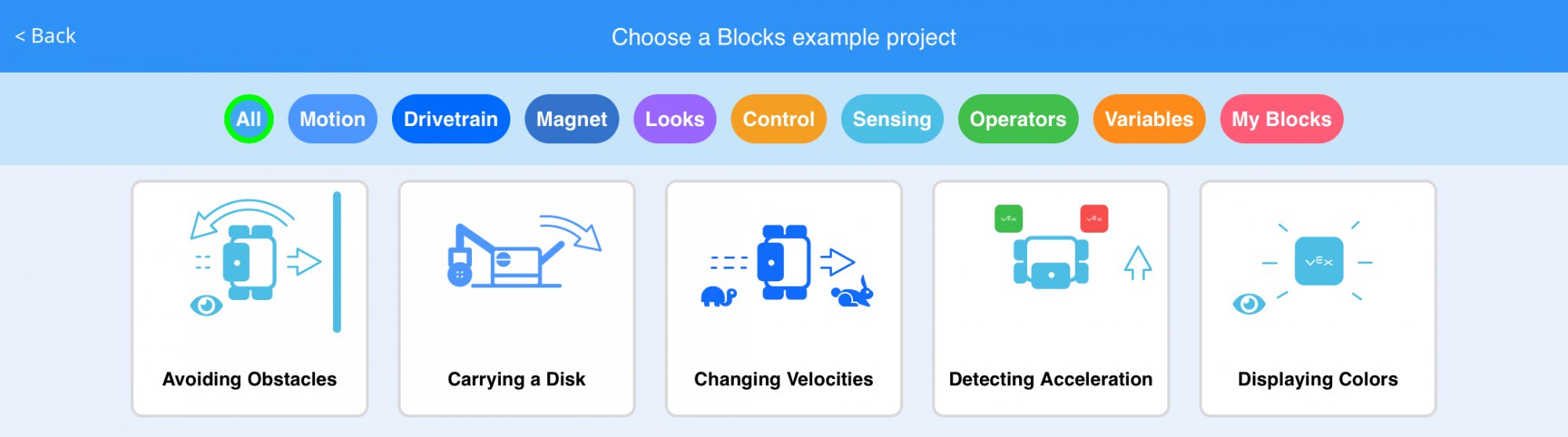
Các dự án ví dụ - Đây là các dự án được tích hợp vào VEXcode GO để chỉ ra các cách khác nhau để lập trình cho robot của bạn. Chúng thường là cơ sở cho công việc của sinh viên trong Phòng thí nghiệm STEM, giống như trong Đơn vị này. Bạn cũng có thể sử dụng Dự án ví dụ như một nguồn tài nguyên phân biệt cho những sinh viên cần nhiều thời gian hơn để thực hành một khái niệm lập trình cụ thể hoặc cho những sinh viên có thể lặp lại để khám phá sâu hơn về một khái niệm. Bạn có thể truy cập Dự án mẫu bất kỳ lúc nào bằng cách chọn Menu Tệp và 'Mở Ví dụ'.
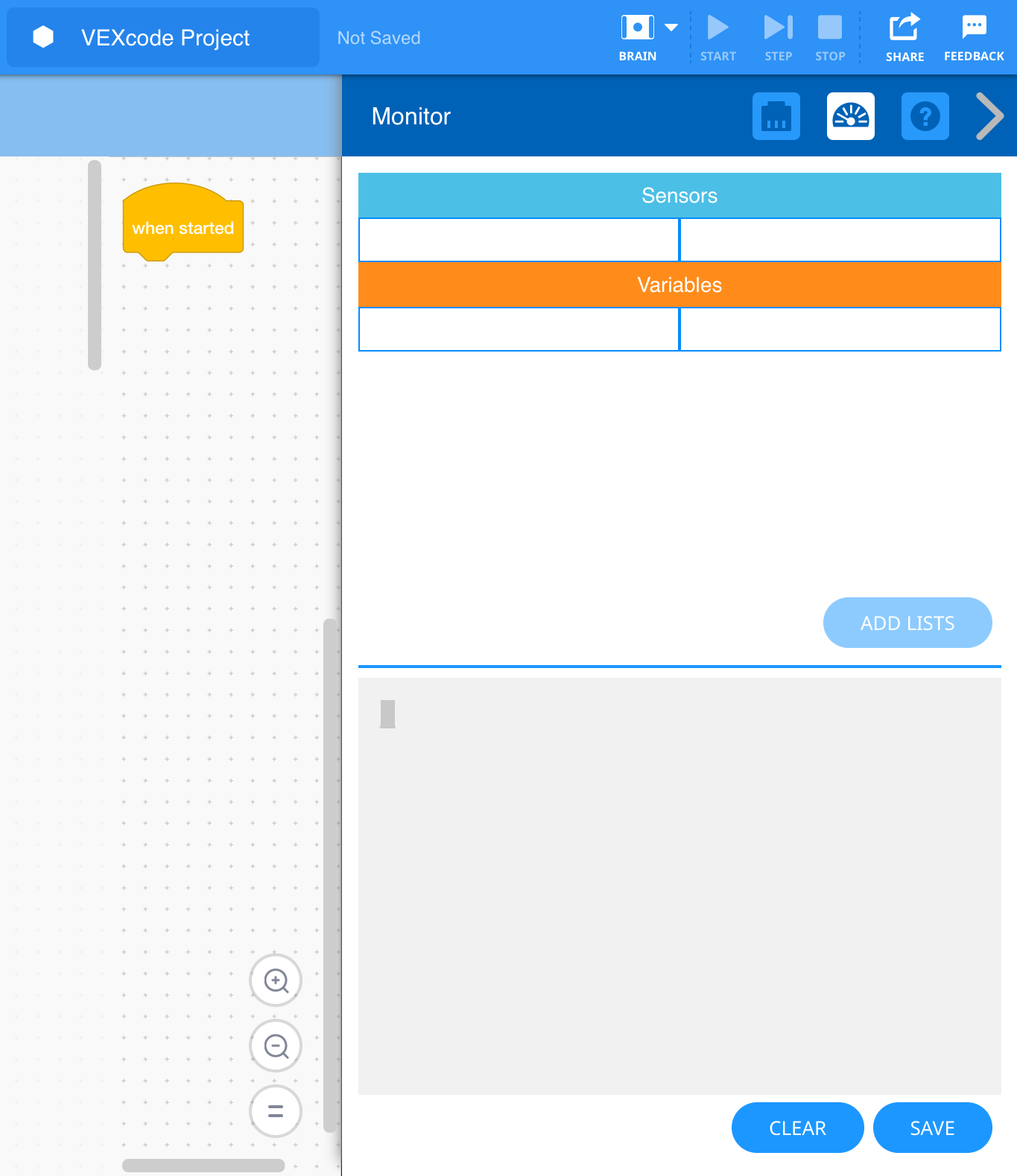
Cửa sổ giám sát - Bảng điều khiển giám sát trong Cửa sổ giám sát cung cấp cho học sinh một cách khác để xem những gì đang diễn ra trong một dự án, bằng cảm biến hoặc bằng rô-bốt của họ theo thời gian thực. Trong Phòng thí nghiệm 4 của Đơn vị này, Bảng điều khiển màn hình được làm nổi bật như một cách để hiển thị cho học sinh dữ liệu mà Cảm biến mắt báo cáo, cung cấp cho họ kết nối trực quan với các hoạt động của cảm biến (nếu không thì sẽ không thể nhìn thấy). Để biết thêm thông tin về tính năng này của Cửa sổ giám sát, hãy xem bài viết Giám sát giá trị biến và cảm biến trong Thư viện VEXcode GO.
Cảm biến là gì?
Về bản chất, cảm biến là một thiết bị giúp robot hiểu được thế giới xung quanh nó. Nó thực hiện điều này bằng cách thu thập và báo cáo dữ liệu về môi trường xung quanh, sau đó có thể sử dụng dữ liệu này trong một dự án để giúp robot đưa ra quyết định hoặc thực hiện một số hành vi nhất định. Trình tự này thường được gọi là vòng lặp quyết định Cảm nhận → Suy nghĩ → Hành động.
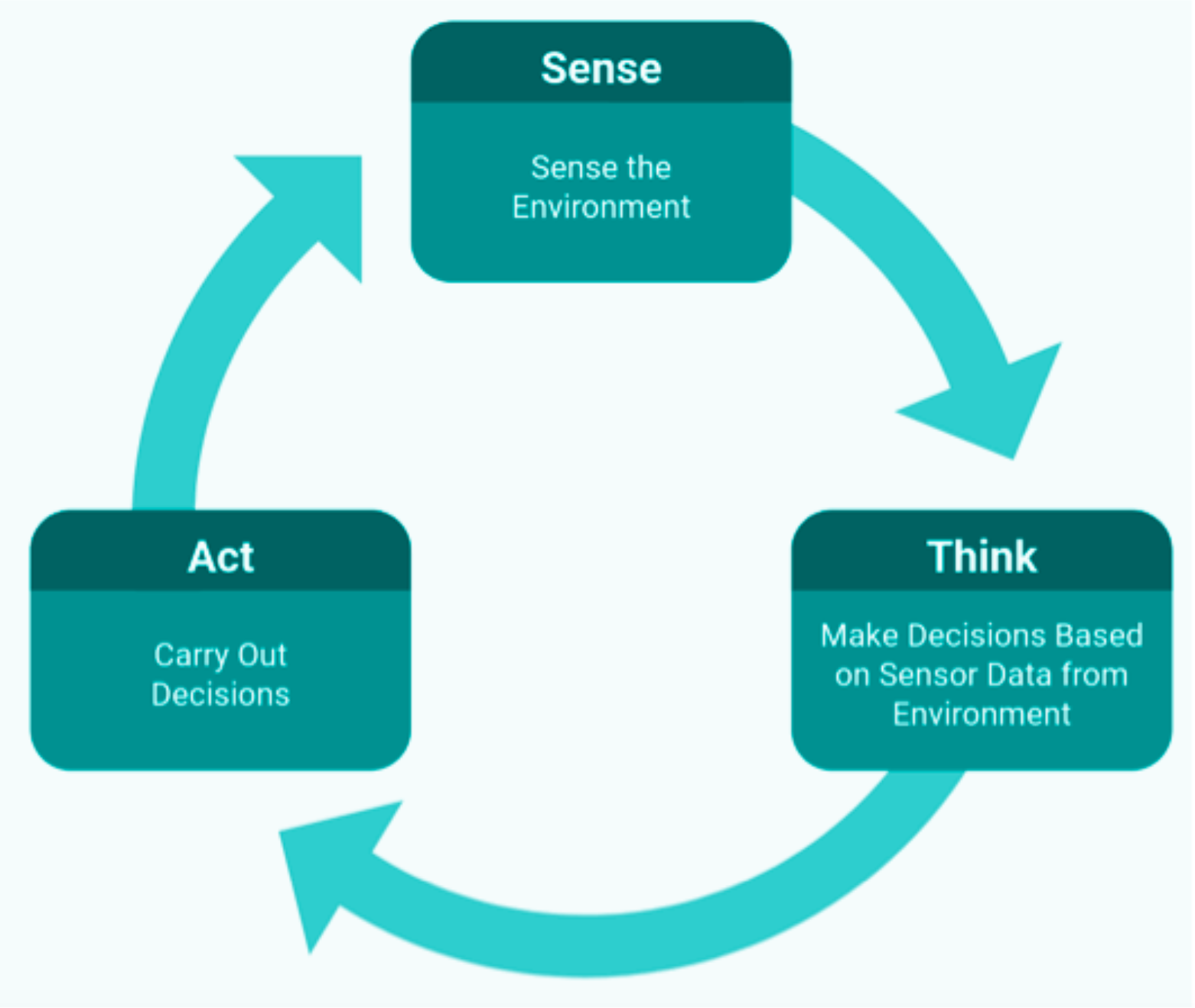
Ví dụ, trong Phòng thí nghiệm 4, Cảm biến mắt được sử dụng trong một dự án để phát hiện màu sắc của vật thể (cảm giác), xác định nhánh của dự án cần theo dõi (suy nghĩ) và sau đó di chuyển Cơ sở mã dựa trên màu sắc (hành động).
Thiết bị này sử dụng cảm biến VEX GO nào?
LED Bumper là cảm biến có thể phát hiện tiếp xúc vật lý (cho dù đèn LED Bumper được nhấn hay thả) và hiển thị màu sắc (đỏ, xanh lá cây hoặc tắt). Trong các dự án, nó có thể được sử dụng như một công tắc, khi nhấn hoặc thả thanh cản LED sẽ tạo ra một hành vi, như trong Phòng thí nghiệm 3. Để biết thông tin chi tiết hơn về cách hoạt động của LED Bumper, hãy xem bài viết Mã hóa bằng VEX GO LED Bumper Thư viện VEX.
Cảm biến mắt là cảm biến có thể xác định ba yếu tố - sự hiện diện của vật thể, màu sắc của vật thể và độ sáng của vật thể hoặc bề mặt. Trong Phòng thí nghiệm 4 của Đơn vị này, Cảm biến mắt được sử dụng để phát hiện vật thể và màu sắc của vật thể đó để điều hướng Mê cung đĩa màu. Dữ liệu do Cảm biến mắt báo cáo có thể được xem trên Bảng điều khiển màn hình, cung cấp cho học sinh hình ảnh trực quan về những gì robot đang "nhìn thấy" và có thể được sử dụng để giúp các em kết nối giữa các cảm biến và hành vi của robot. Để biết thêm thông tin về Cảm biến mắt và cách thức hoạt động của nó, hãy xem bài viết Mã hóa bằng Cảm biến mắt VEX GO Thư viện VEX.