
Hintergrund
In dieser Einheit lernen die Schüler die Funktionen von VEX GO kennen, indem sie die Codebasis und ihre Iterationen erstellen, um auf unterschiedliche Weise zu navigieren. Durch den Übergang vom Fahren der Code Base per Fernbedienung im Fahrmodus zum Fahren per Code bis hin zum Fahren mithilfe von Sensordaten können die Schüler ihr Verständnis der Komponenten und Funktionen von VEX GO und VEXcode GO vertiefen.
Welche Funktionen sind in VEXcode GO verfügbar?
VEXcode GO ist die blockbasierte Codierungsplattform für VEX GO. Um VEXcode GO mit Ihrem Roboter verwenden zu können, müssen Sie es auf Ihrem Gerät einrichten. Weitere Informationen finden Sie im Artikel Einrichten von VEXcode GO VEX-Bibliothek, falls Sie dies noch nicht getan haben.
In VEXcode GO gibt es viele Funktionen, die Schüler beim Erlernen von Programmier- und MINT-Konzepten in der gesamten Einheit unterstützen können.
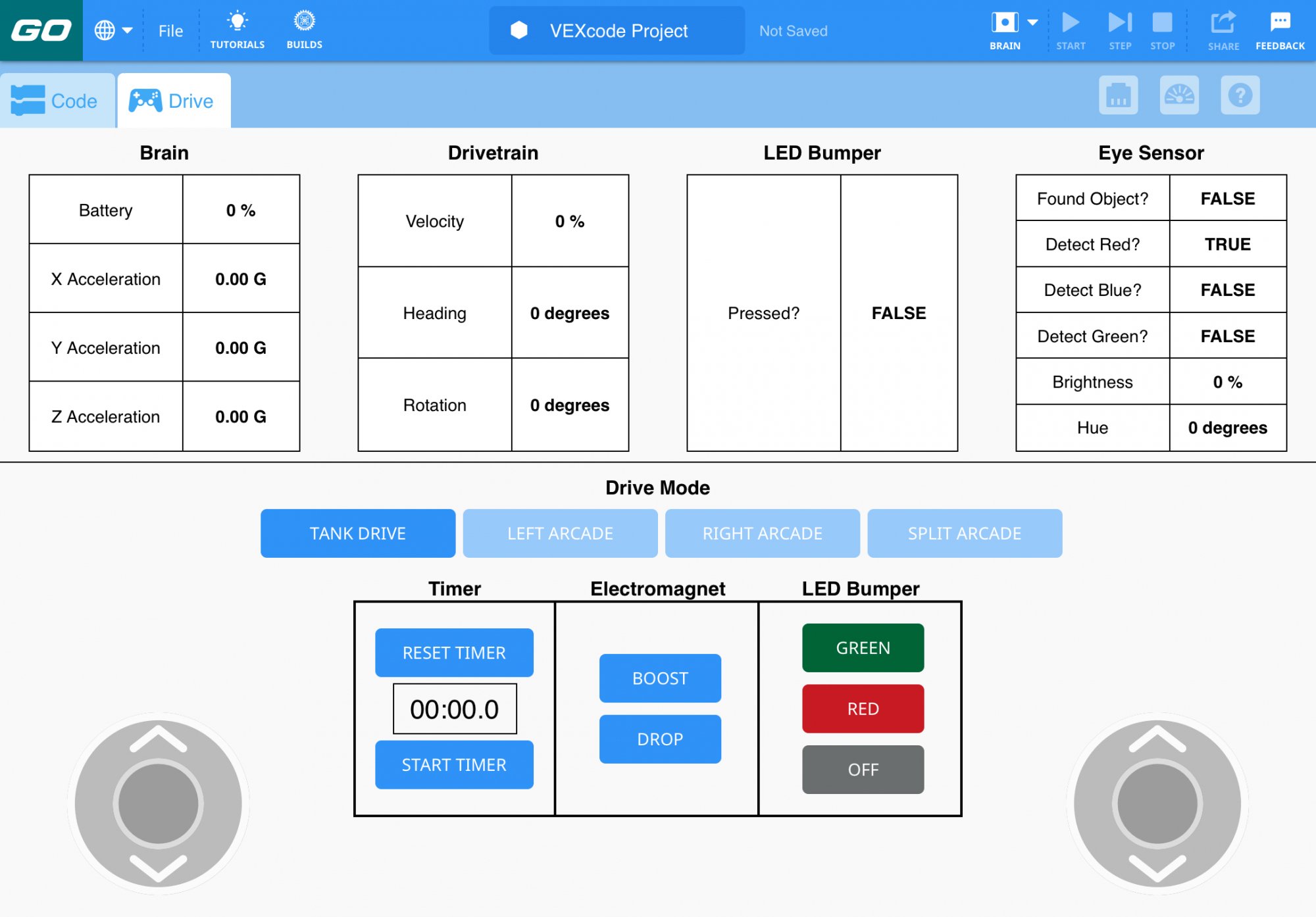
Die Registerkarte „Laufwerk“ – Übung 1 führt die Schüler in die Steuerung der Codebasis mithilfe der Fernbedienungsfunktion „Fahrmodus“ ein, die sich auf der Registerkarte „Laufwerk“ befindet. Im Fahrmodus können Schüler sofort mit dem Fahren ihrer Code Base beginnen, wenn sie ihr Brain mit ihrem Gerät verbinden, da es für die Code Base vorkonfiguriert ist. Ausführlichere Informationen zur Verwendung der Registerkarte „Laufwerk“ finden Sie im Artikel Verwenden der Fernbedienung in VEXcode GO VEX-Bibliothek.
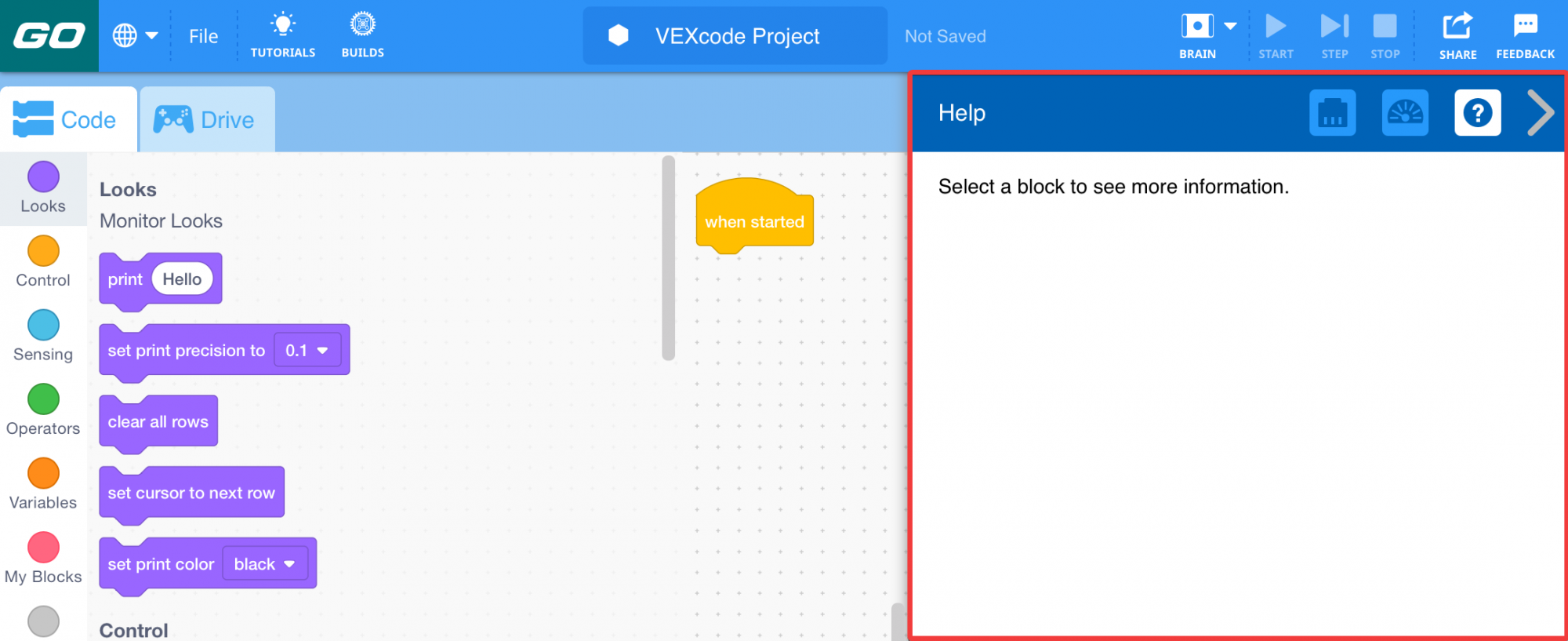
Das Hilfefenster – Die Hilfefunktion von VEXcode GO kann verwendet werden, um mehr über einen Block zu erklären, während Sie in VEXcode GO arbeiten. Öffnen Sie einfach das Hilfefenster und wählen Sie den Block aus, über den Sie mehr erfahren möchten. Studierende können diese Funktion während der Arbeit nutzen, um Fehler bei ihren eigenen Projekten zu beheben. Weitere Informationen zur VEXcode GO-Hilfe finden Sie im Artikel Zugriff auf die Hilfe VEX-Bibliothek.
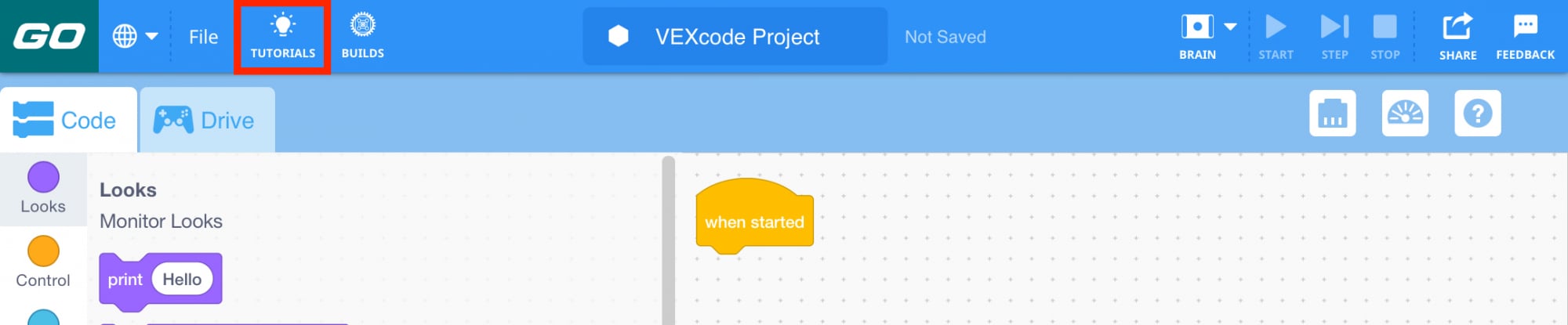
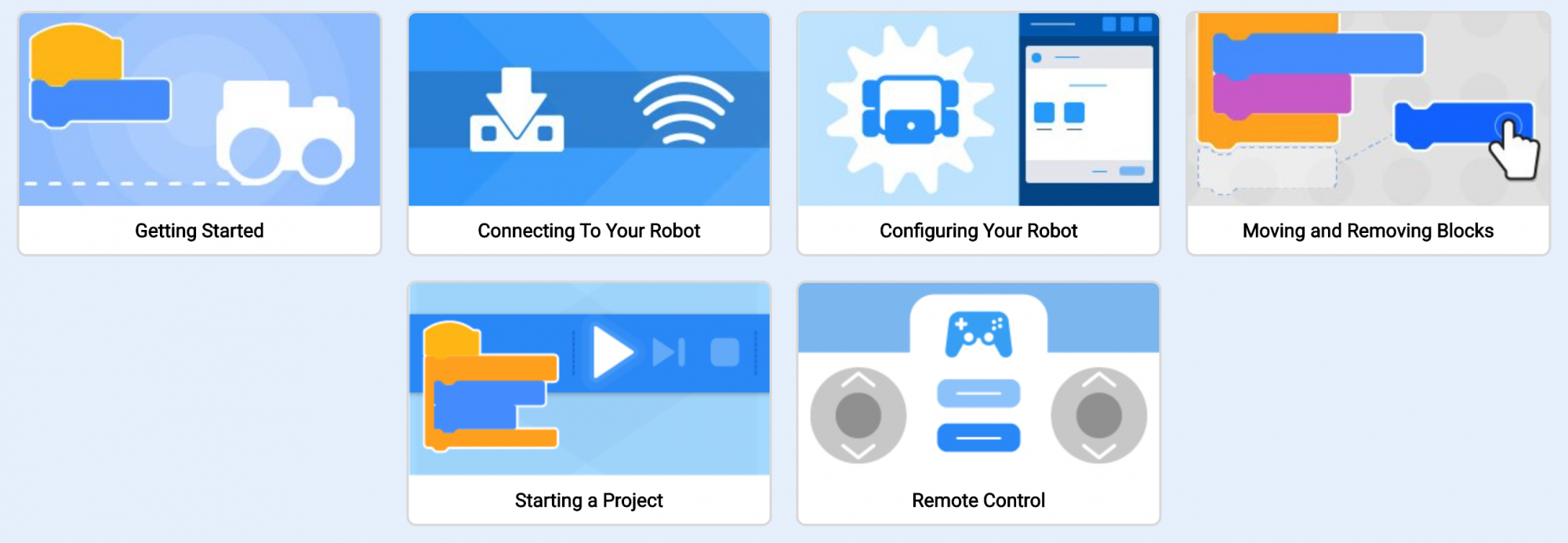
Die Tutorials – Die Tutorials sind kurze Erklärvideos, die Ihnen zeigen, wie Sie verschiedene Dinge in VEXcode GO tun. Sie sind in VEXcode GO eingebettet und können durch Auswahl von „Tutorials“ in der Symbolleiste angezeigt werden.
Sie können Schüler jederzeit auf die Tutorial-Videos verweisen, wenn sie Hilfe benötigen, um beispielsweise eine Verbindung zu ihrem Roboter herzustellen oder Blöcke aus einem Projekt zu verschieben und zu entfernen. Wenn Sie die Schüler daran erinnern, zunächst die Tutorial-Videos zu lesen, um Antworten auf ihre Fragen zu erhalten, können Sie Zeit gewinnen, um anderen Schülern zu helfen, die möglicherweise auf anderen Niveaus arbeiten.
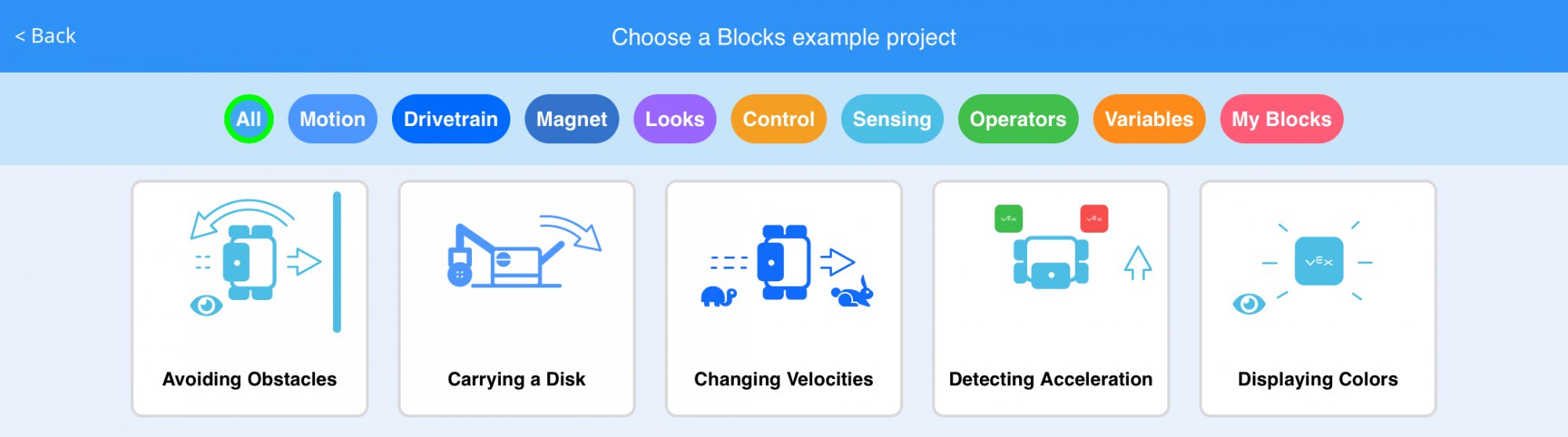
Die Beispielprojekte – Dies sind Projekte, die in VEXcode GO integriert sind, um verschiedene Möglichkeiten zum Codieren Ihres Roboters zu zeigen. Sie bilden häufig die Grundlage für studentische Arbeiten in STEM Labs, wie sie in dieser Einheit behandelt werden. Sie können Beispielprojekte auch als Differenzierungsressource für Schüler verwenden, die möglicherweise mehr Zeit benötigen, um ein bestimmtes Codierungskonzept zu üben, oder für diejenigen, die es wiederholen können, um ein Konzept tiefer zu erforschen. Sie können jederzeit auf die Beispielprojekte zugreifen, indem Sie im Menü „Datei“ auf „Beispiele öffnen“ klicken.
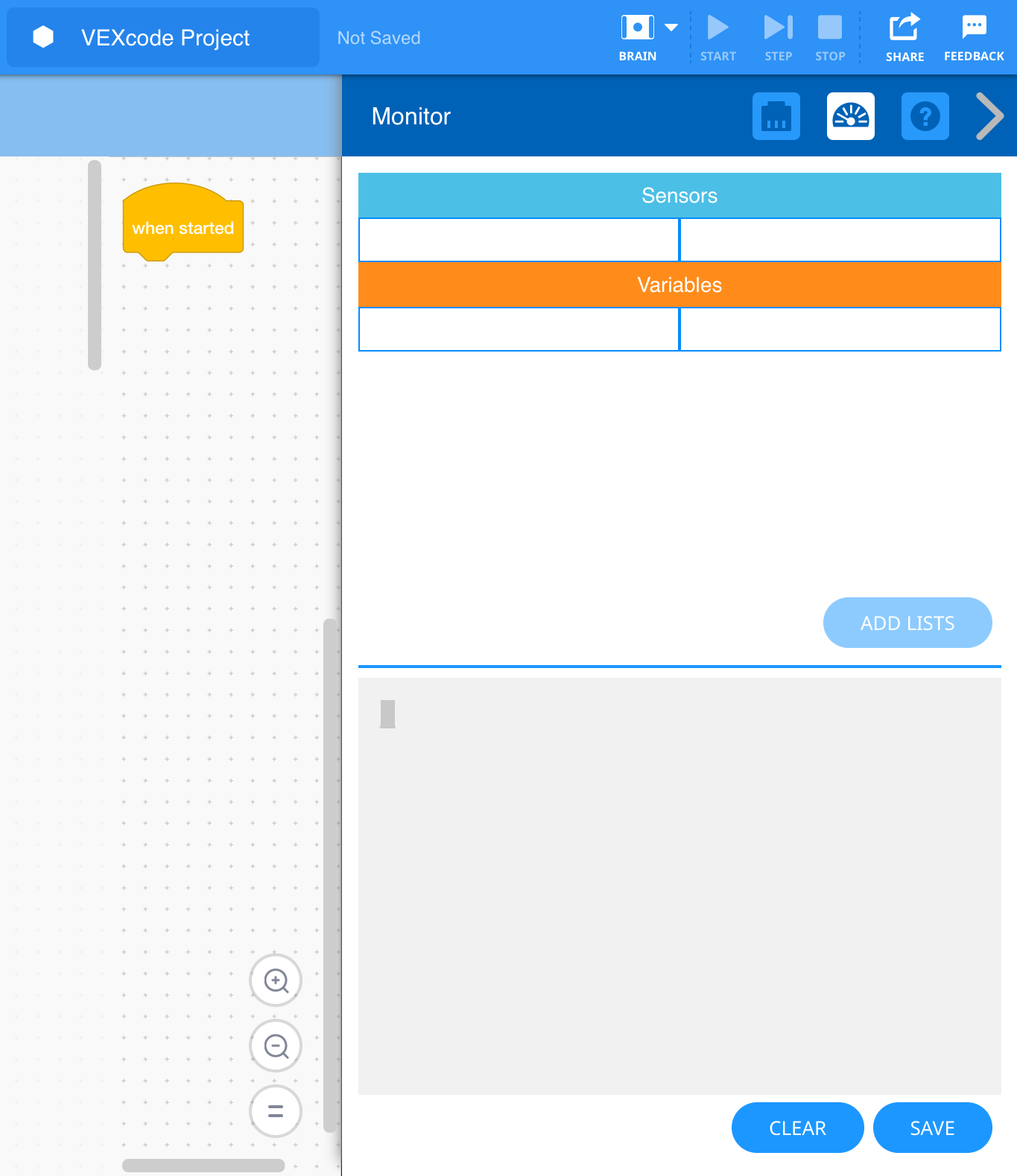
Das Monitorfenster – Die Monitorkonsole im Monitorfenster bietet Schülern eine andere Möglichkeit, in Echtzeit zu sehen, was in einem Projekt, mit einem Sensor oder mit ihrem Roboter passiert. In Übung 4 dieser Einheit wird die Monitorkonsole als Möglichkeit hervorgehoben, den Schülern die vom Augensensor gemeldeten Daten anzuzeigen und ihnen eine visuelle Verbindung zu den Aktionen des Sensors zu bieten (die sonst nicht sichtbar sind). Weitere Informationen zu dieser Funktion des Überwachungsfensters finden Sie im Artikel „Überwachung von Variablen und Sensorwerten in der VEXcode GO VEX-Bibliothek“.
Was ist ein Sensor?
Ein Sensor ist im Wesentlichen ein Gerät, das dem Roboter hilft, die Welt um ihn herum zu verstehen. Dies geschieht durch das Sammeln und Melden von Daten über seine Umgebung, die dann in einem Projekt verwendet werden können, um den Roboter dazu zu bringen, Entscheidungen zu treffen oder bestimmte Verhaltensweisen auszuführen. Diese Abfolge wird oft als Entscheidungsschleife „Sinn → Denken → Handeln“ bezeichnet.
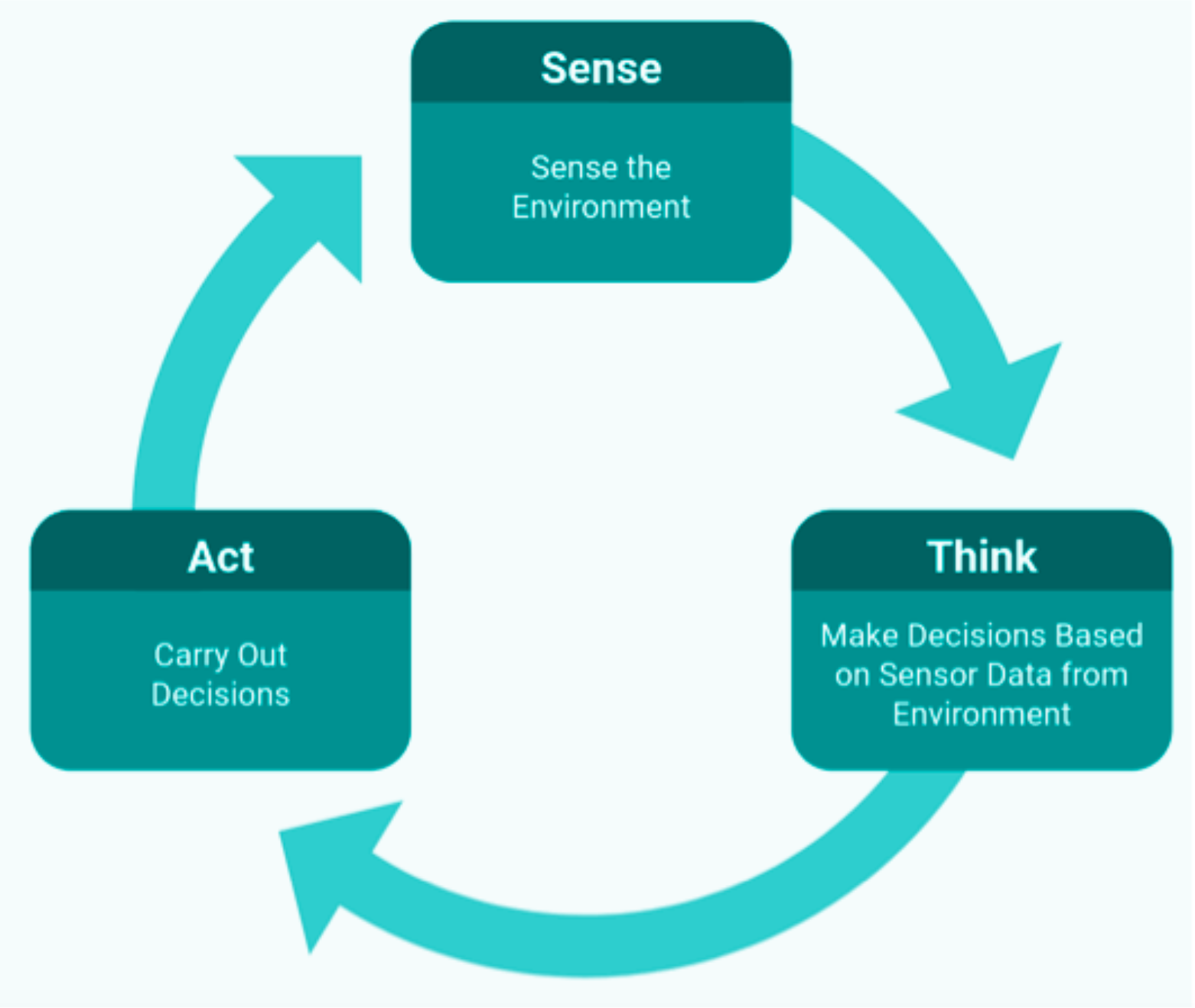
In Lab 4 beispielsweise wird der Augensensor in einem Projekt verwendet, um die Farbe eines Objekts zu erkennen (Sense), den Zweig des Projekts zu bestimmen, dem man folgen soll (Think), und dann die Codebasis basierend auf der Farbe zu verschieben (Act). .
Welche VEX GO-Sensoren werden in diesem Gerät verwendet?
Der LED Bumper ist ein Sensor, der physischen Kontakt erkennen kann (ob der LED Bumper gedrückt oder losgelassen wird) und Farben anzeigen kann (rot, grün oder aus). In Projekten kann es als Schalter verwendet werden, wobei das Drücken oder Loslassen des LED-Stoßfängers dazu führt, dass ein Verhalten auftritt, wie es in Lab 3 der Fall ist. Ausführlichere Informationen zur Funktionsweise des LED-Stoßfängers finden Sie im Artikel Coding with the VEX GO LED Bumper VEX Library.
Der Eye Sensor ist ein Sensor, der drei Dinge bestimmen kann – die Anwesenheit eines Objekts, seine Farbe und die Helligkeit eines Objekts oder einer Oberfläche. In Übung 4 dieser Einheit wird der Augensensor verwendet, um ein Objekt und seine Farbe zu erkennen, um durch ein Farbscheibenlabyrinth zu navigieren. Die vom Augensensor gemeldeten Daten können in der Monitorkonsole angezeigt werden, die den Schülern eine visuelle Darstellung dessen bietet, was der Roboter „sieht“, und ihnen dabei helfen kann, die Verbindung zwischen den Sensoren und dem Verhalten des Roboters herzustellen . Weitere Informationen zum Augensensor und seiner Funktionsweise finden Sie im Artikel Coding with the VEX GO Eye Sensor VEX Library.