
Sfondo
In questa unità, gli studenti apprenderanno le funzionalità di VEX GO, attraverso la costruzione del Code Base e le sue iterazioni per navigare in diversi modi. Passando dalla guida del Code Base tramite telecomando, in modalità Drive, alla guida tramite codice, alla guida utilizzando i dati dei sensori, gli studenti saranno in grado di consolidare la loro comprensione dei componenti e delle funzioni di VEX GO e VEXcode GO.
Quali funzionalità sono disponibili in VEXcode GO?
VEXcode GO è la piattaforma di codifica basata su blocchi per VEX GO. Per utilizzare VEXcode GO con il tuo robot, dovrai configurarlo sul tuo dispositivo. Consulta l'articolo Impostazione della libreria VEXcode GO VEX per ulteriori informazioni, se non lo hai già fatto.
All'interno di VEXcode GO ci sono molte funzionalità che possono essere utilizzate per supportare gli studenti mentre apprendono la codifica e i concetti STEM in tutta l'Unità.
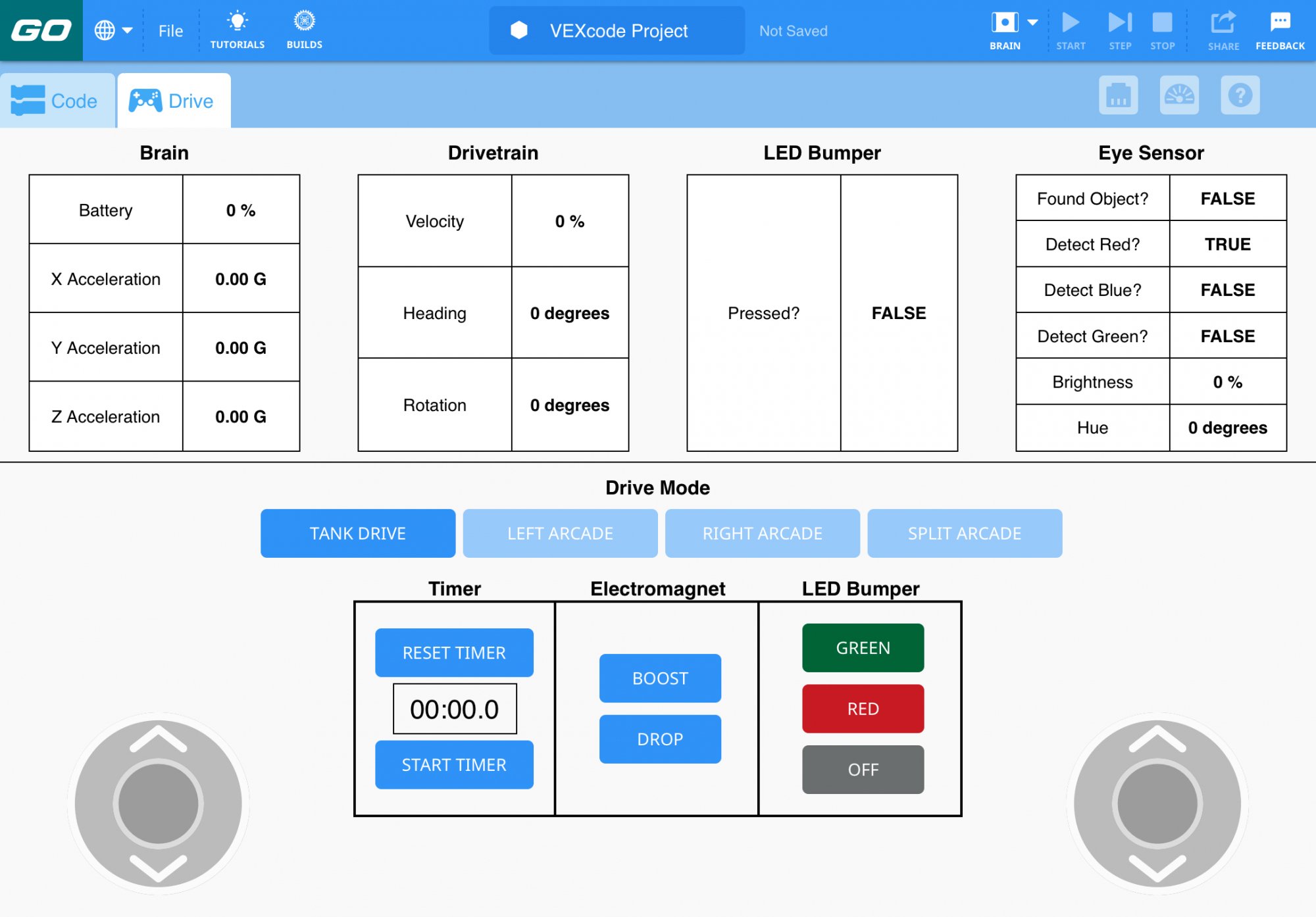
La scheda Drive - Lab 1 introduce gli studenti alla guida del Code Base utilizzando la funzione di controllo remoto, Drive Mode, situata nella scheda Drive. La modalità Guida consente agli studenti di iniziare subito a guidare il proprio Code Base quando collegano il proprio Brain al dispositivo, poiché è preconfigurato per il Code Base. Per informazioni più dettagliate sull'utilizzo della scheda Drive, vedere l'articolo Utilizzo del telecomando in VEXcode GO VEX Library.
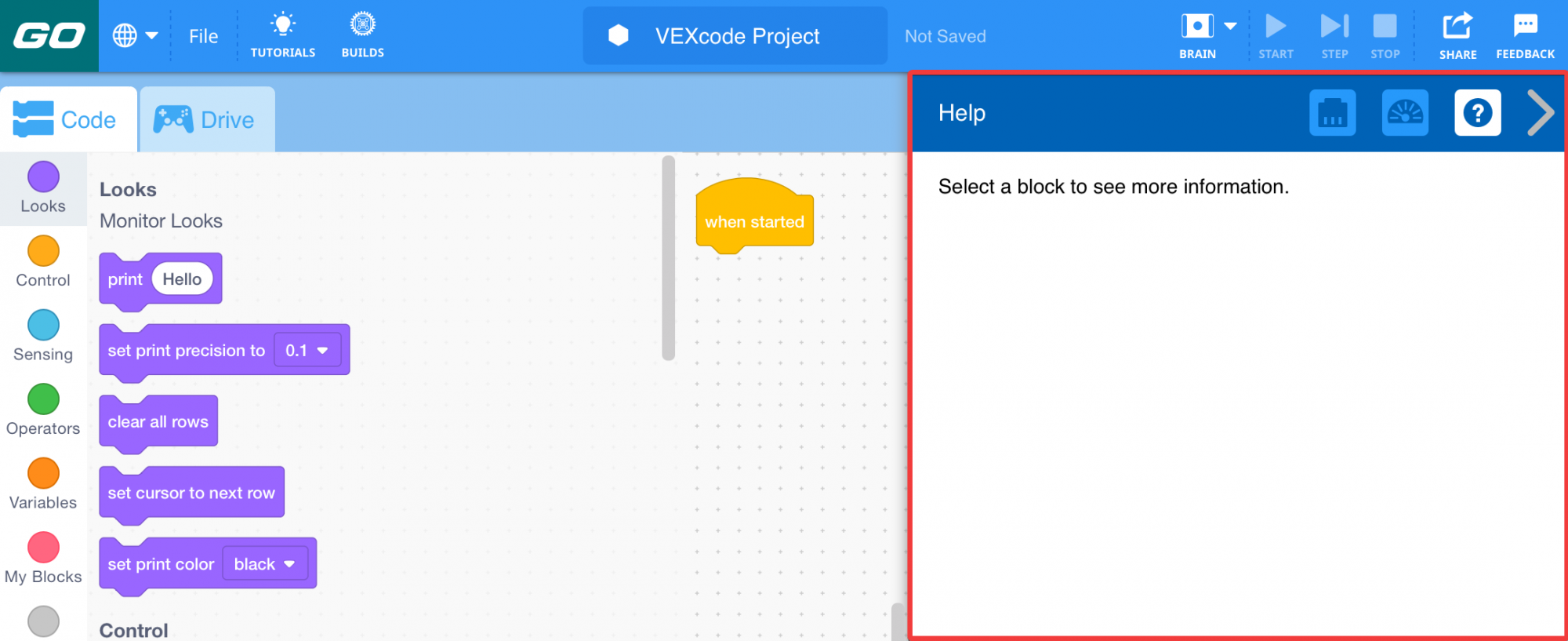
La finestra della Guida - La funzione Guida di VEXcode GO può essere utilizzata per spiegare di più su un blocco mentre lavori in VEXcode GO. Apri semplicemente la finestra della Guida e seleziona il blocco su cui desideri informazioni. Gli studenti possono utilizzare questa funzionalità mentre lavorano, per aiutarli a risolvere i problemi relativi ai propri progetti. Per ulteriori informazioni sulla Guida di VEXcode GO, vedere l'articolo Accesso alla guida Libreria VEX.
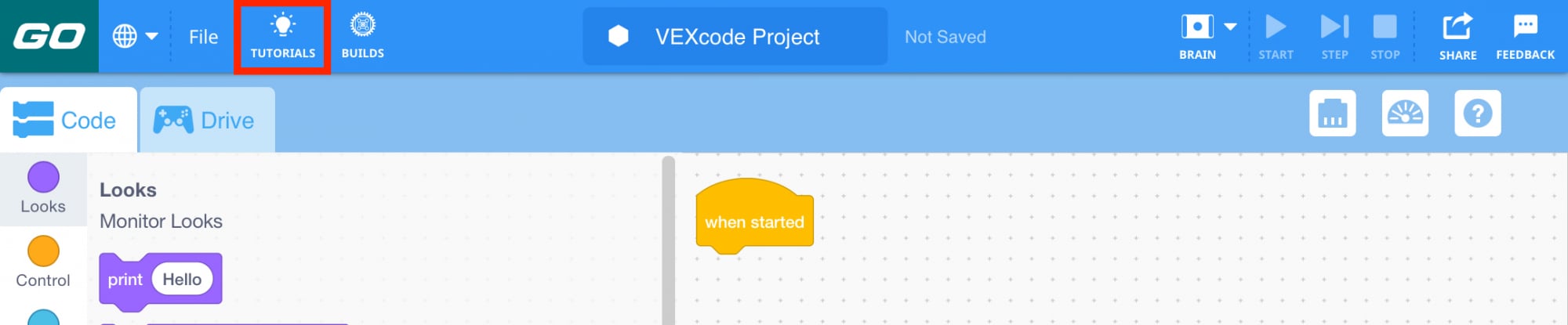
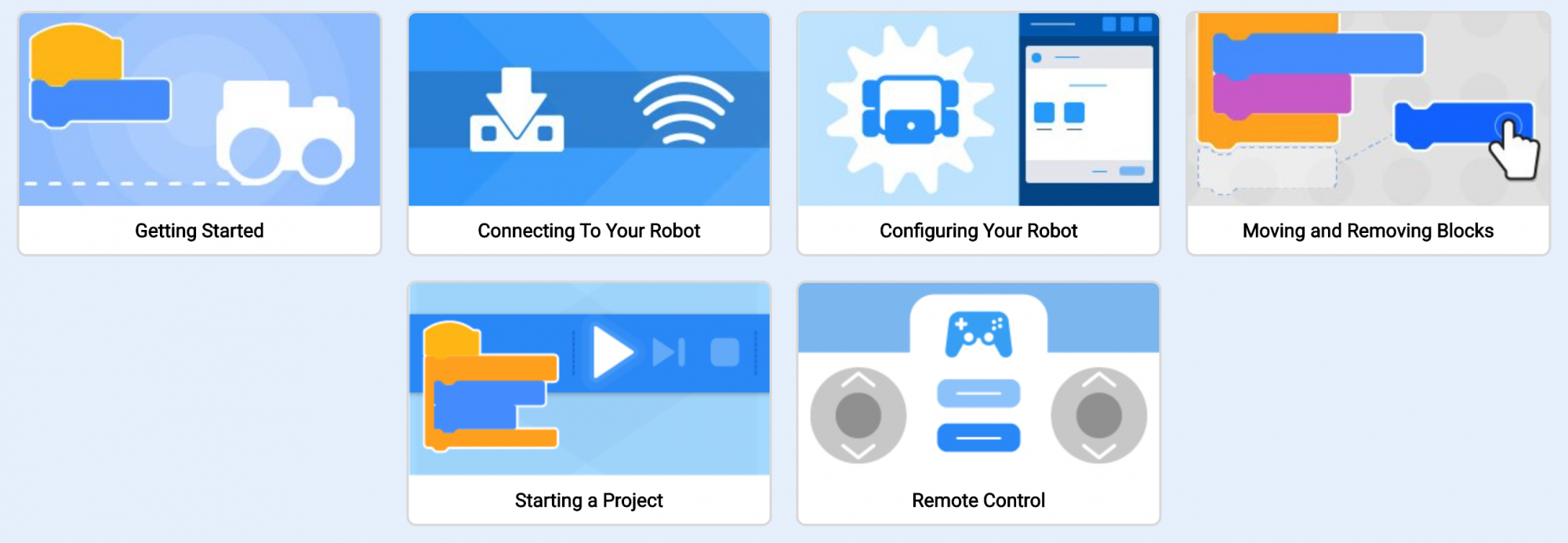
I Tutorial - I Tutorial sono brevi video esplicativi che mostrano come fare diverse cose in VEXcode GO. Sono incorporati in VEXcode GO e possono essere visualizzati selezionando "Tutorial" nella barra degli strumenti.
Puoi indirizzare gli studenti ai video tutorial in qualsiasi momento, se hanno bisogno di aiuto per fare cose come connettersi al proprio robot o spostare e rimuovere blocchi da un progetto. Ricordare agli studenti di controllare prima i video tutorial per trovare le risposte alle loro domande può aiutarti a liberare tempo per aiutare altri studenti che potrebbero lavorare a livelli diversi.
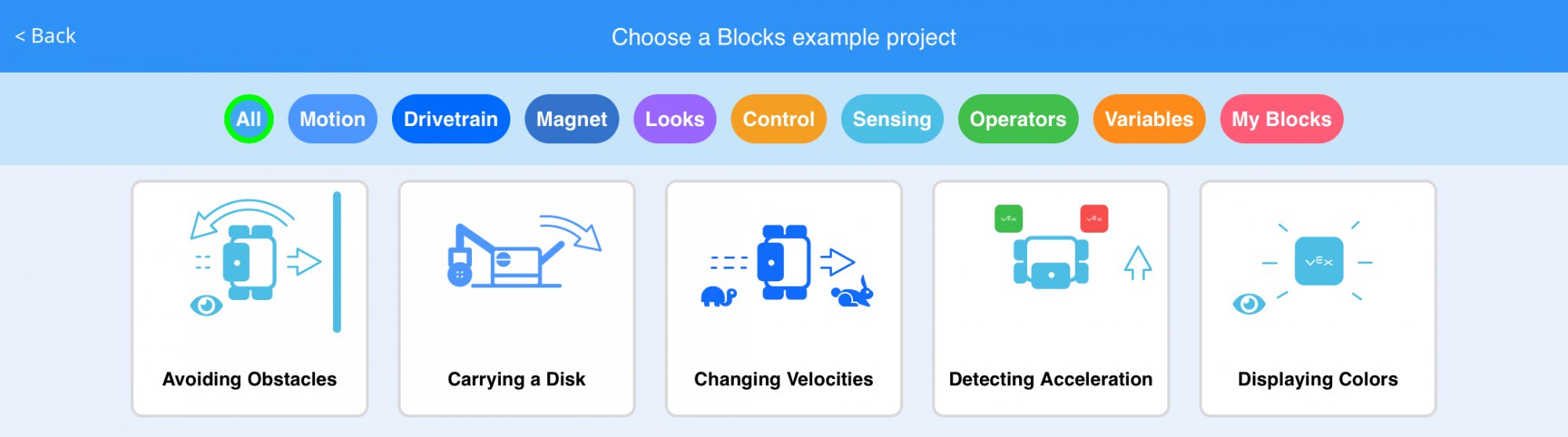
I progetti di esempio - Questi sono progetti integrati in VEXcode GO per mostrare diversi modi di codificare il tuo robot. Costituiscono spesso la base per il lavoro degli studenti nei laboratori STEM, come lo sono in questa Unità. Puoi anche utilizzare i progetti di esempio come risorsa di differenziazione per gli studenti che potrebbero aver bisogno di più tempo per esercitarsi su un particolare concetto di codifica o per coloro che possono iterare su di esso per esplorare un concetto più profondamente. Puoi accedere ai progetti di esempio in qualsiasi momento selezionando il menu File e "Apri esempi".
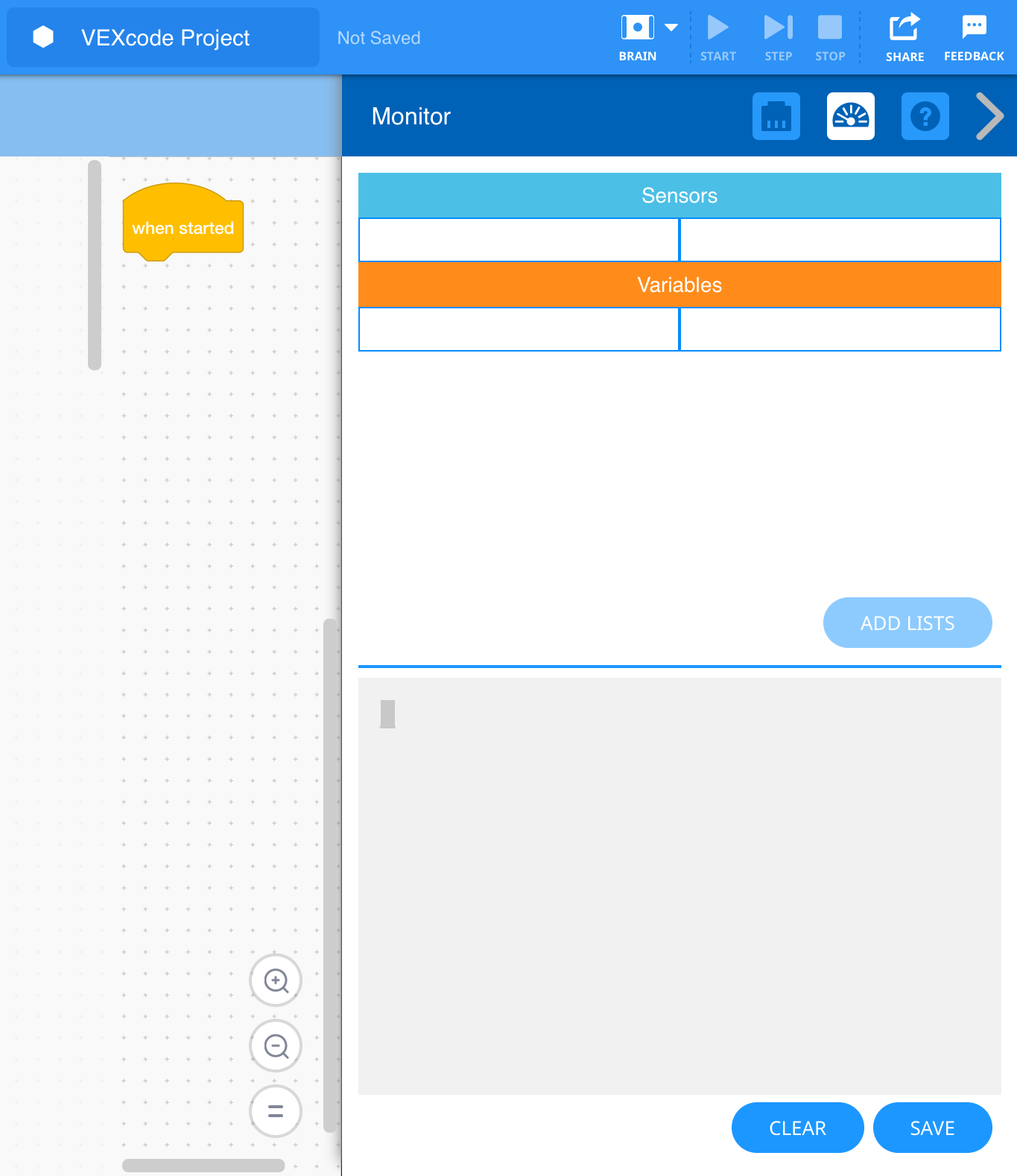
La Finestra Monitor - La Console Monitor nella Finestra Monitor offre agli studenti un modo diverso di vedere cosa sta succedendo in un progetto, con un sensore o con il loro robot in tempo reale. Nel Laboratorio 4 di questa Unità, la Console del Monitor viene evidenziata come un modo per mostrare agli studenti i dati riportati dal Sensore Occhio, offrendo loro una connessione visiva alle azioni del sensore (che altrimenti non sarebbero visibili). Per ulteriori informazioni su questa funzionalità della finestra Monitor, vedere l'articolo Monitoraggio della variabile e dei valori del sensore nella libreria VEXcode GO VEX.
Cos'è un sensore?
Un sensore è, in sostanza, un dispositivo che aiuta il robot a comprendere il mondo che lo circonda. Lo fa raccogliendo e segnalando dati sul suo ambiente, che possono poi essere utilizzati in un progetto per far prendere decisioni al robot o eseguire determinati comportamenti. Questa sequenza viene spesso definita il ciclo decisionale Senso → Pensa → Azione.
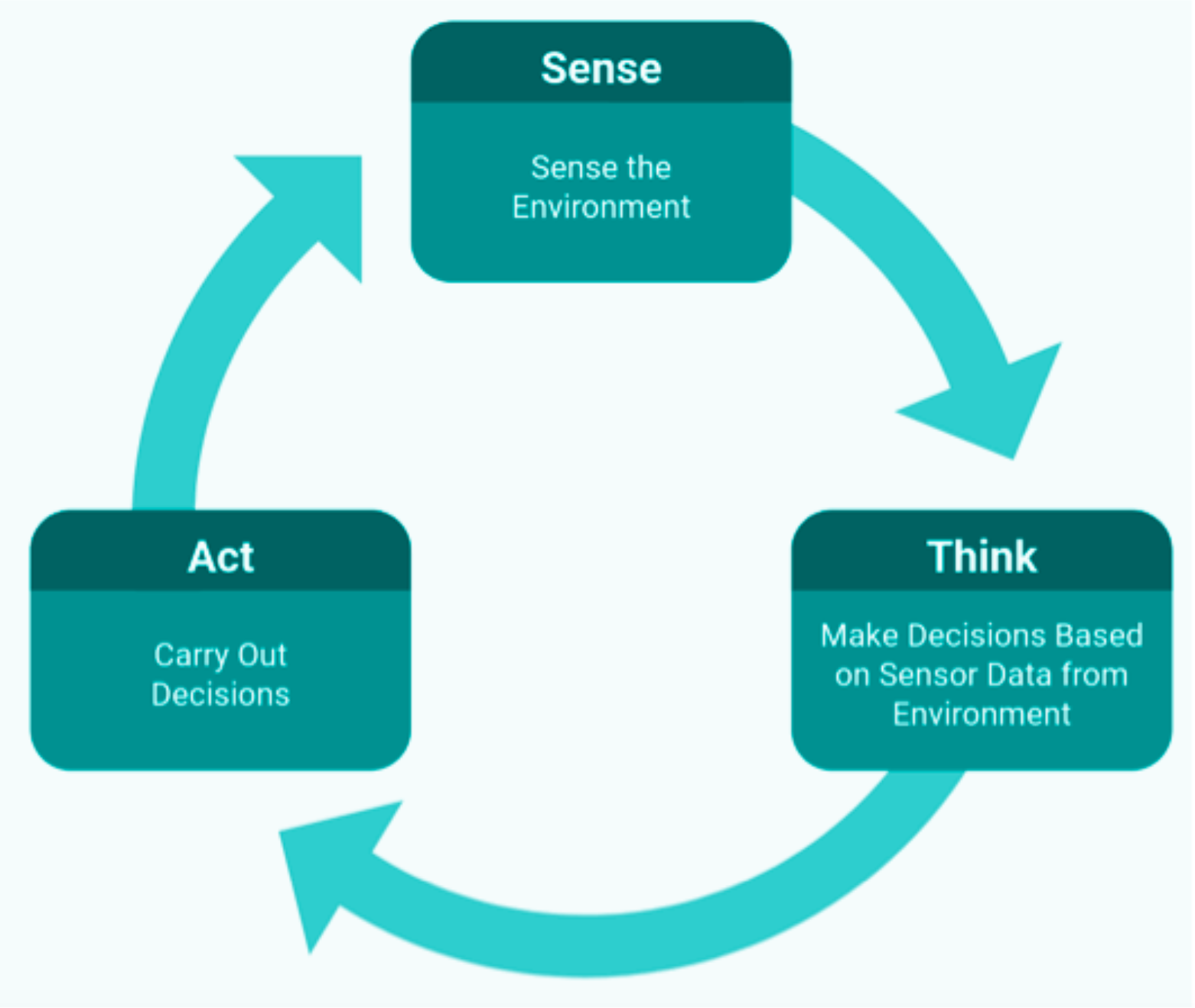
Nel Lab 4, ad esempio, il sensore oculare viene utilizzato in un progetto per rilevare il colore di un oggetto (senso), determinare il ramo del progetto da seguire (pensare), quindi spostare il codice base in base al colore (agire). .
Quali sensori VEX GO vengono utilizzati in questa unità?
Il paraurti LED è un sensore in grado di rilevare il contatto fisico (se il paraurti LED è premuto o rilasciato) e visualizzare i colori (rosso, verde o spento). Nei progetti, può essere utilizzato come interruttore, in cui la pressione o il rilascio del paraurti LED provoca il verificarsi di un comportamento , come nel Lab 3. Per informazioni più dettagliate su come funziona il paraurti LED, consultare l'articolo Codifica con il paraurti LED VEX GO Articolo della libreria VEX.
Lo Eye Sensor è un sensore in grado di determinare tre cose: la presenza di un oggetto, il suo colore e la luminosità di un oggetto o di una superficie. Nel laboratorio 4 di questa unità, il sensore oculare viene utilizzato per rilevare un oggetto e il suo colore per navigare in un labirinto di dischi colorati. I dati riportati dal sensore oculare possono essere visualizzati nella console del monitor, che offre agli studenti una rappresentazione visiva di ciò che il robot sta "vedendo" e può essere utilizzata per aiutarli a stabilire la connessione tra i sensori e i comportamenti del robot . Per ulteriori informazioni sul sensore oculare e su come funziona, vedere l'articolo Codifica con il sensore oculare VEX GO Libreria VEX.