
วิธีการเข้ารหัสทางเลือก
ปรับหน่วยนี้เพื่อใช้วิธีการเข้ารหัสทางเลือก
หน่วยห้องปฏิบัติการ STEM นี้เขียนขึ้นเพื่อใช้กับ Coder และ Coder Cards อย่างไรก็ตามคุณสามารถใช้ปุ่มบนหุ่นยนต์ 123 เพื่อสัมผัสรหัสหรือใช้ VEXcode 123 เพื่อใช้งานยูนิต ความยืดหยุ่นนี้จะช่วยให้ท่านตอบสนองความต้องการส่วนบุคคลของนักเรียนได้ ตัวอย่างเช่นหากนักเรียนของท่านคุ้นเคยกับ VEXcode 123 พวกเขาสามารถทำกิจกรรมการเข้ารหัสทั้งหมดด้วย VEXcode 123 ส่วนสรุปของแต่ละห้องปฏิบัติการมีข้อมูลเพิ่มเติม ที่สามารถช่วยคุณปรับเปลี่ยนแต่ละห้องปฏิบัติการเพื่อใช้ VEXcode 123 หรือปุ่มบนหุ่นยนต์ 123
การปรับเปลี่ยน VEXcode 123
หากใช้ VEXcode 123 กับหน่วยนี้นักเรียนสามารถใช้บล็อกต่อไปนี้เพื่อขับเคลื่อนหุ่นยนต์ 123 ในกิจกรรมการเข้ารหัส สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการทำงานกับ VEXcode 123 โปรดดูที่ส่วน VEXcode 123 ของไลบรารีVEX
| บล็อก VEXcode 123 | พฤติกรรม |
|---|---|
 |
บล็อก [Drive for] เคลื่อนหุ่นยนต์ 123 ตัวไปข้างหน้าหรือย้อนกลับตามระยะทางที่กำหนด กำหนดระยะทางที่หุ่นยนต์ 123 จะเคลื่อนที่โดยการป้อนค่าลงในวงรี |
 |
บล็อก [Turn for] จะหมุนหุ่นยนต์ 123 ตัวไปทางซ้ายหรือขวาตามจำนวนองศาที่กำหนด |
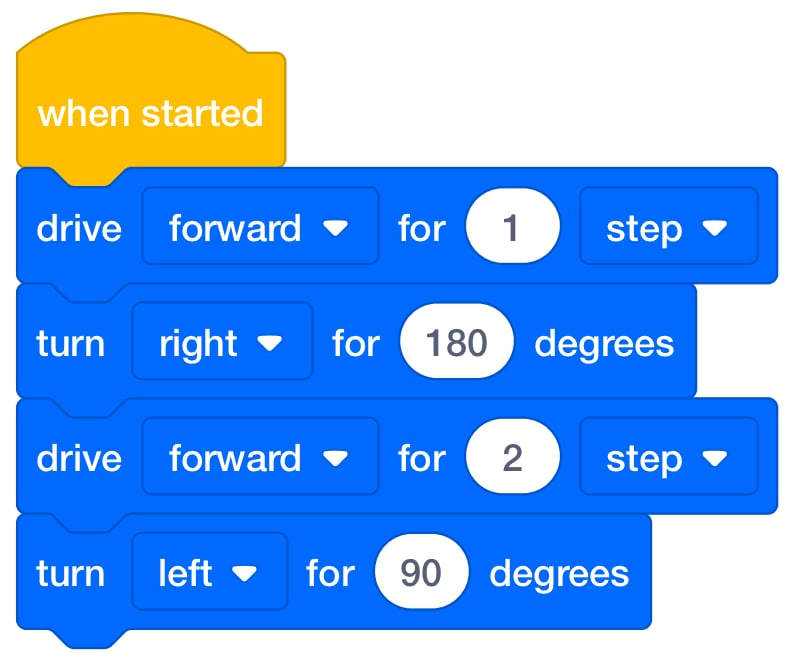
- ในห้องปฏิบัติการที่ 1 นักเรียนจะเรียงลำดับคำสั่งเพื่อสร้างท่าเต้นสำหรับหุ่นยนต์ 123 ตัว นี่คือโซลูชันที่เป็นไปได้สำหรับห้องปฏิบัติการ 1 เล่นส่วนที่ 2
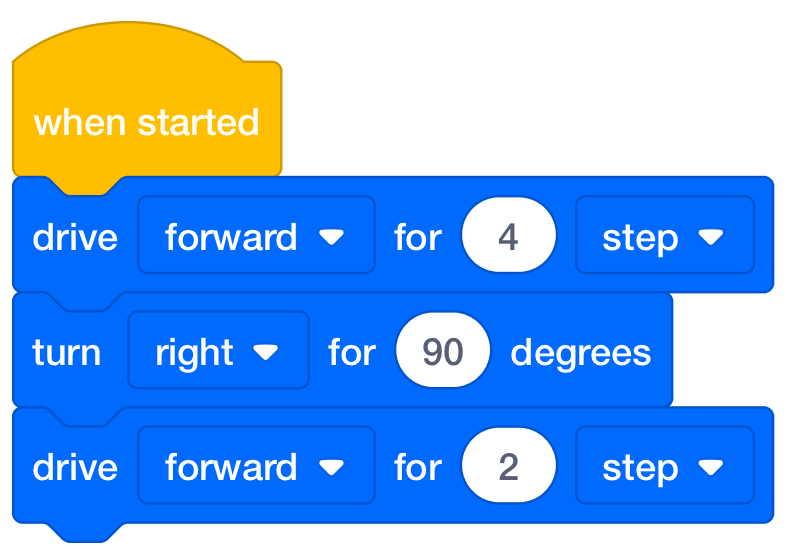
- ในห้องปฏิบัติการที่ 2 นักเรียนจะสร้างโครงการเพื่อทำให้หุ่นยนต์ 123 ไปถึงสมบัติบนแผนที่สมบัติ นี่คือโซลูชัน VEXcode 123 ที่เป็นไปได้สำหรับตัวอย่างใน Play Part 1
การปรับตัวด้วยการสัมผัส
นอกจากนี้คุณยังสามารถปรับหน่วยนี้เพื่อใช้ปุ่มบนหุ่นยนต์ 123 เพื่อทำกิจกรรมในห้องปฏิบัติการเหล่านี้ให้เสร็จสมบูรณ์ นักเรียนควรเข้าใจว่าการกดปุ่มแต่ละครั้งเท่ากับการเคลื่อนไหว 1 ครั้งของหุ่นยนต์ 123 ตัวและพวกเขาสามารถสร้างโปรเจกต์ด้วยการกดปุ่มหนึ่งชุด สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการใช้หุ่นยนต์ 123 ดูบทความ การใช้ห้องสมุดหุ่นยนต์123 สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการเข้ารหัส โดยใช้ปุ่มสัมผัสบนหุ่นยนต์ 123 ตัวโปรดดู การเข้ารหัสด้วยปุ่มสัมผัสบนบทความ 123 Robot vexLibrary
- ในการปรับห้องปฏิบัติการ 1 ให้เน้นที่ไอคอนปุ่มในส่วนการมีส่วนร่วมและสัญลักษณ์บนปุ่มแสดงถึงพฤติกรรมของหุ่นยนต์ 123 อย่างไร
| ปุ่ม | ชื่อ | พฤติกรรม |
|---|---|---|
 |
เริ่ม | เริ่มโปรเจกต์เมื่อกด |
 |
ย้าย | 123 Robot จะขับเคลื่อนไปข้างหน้าเป็นเวลา 1 ความยาวของหุ่นยนต์หรือ 1 สี่เหลี่ยมจัตุรัสบนฟิลด์ 123 |
 |
ขวา | 123 หุ่นยนต์จะหันไปทางขวา 90 องศา |
 |
ซ้าย | 123 หุ่นยนต์จะหันไปทางซ้าย 90 องศา |
 |
เสียง | 123 Robot จะเล่นเสียงบีบแตร |
- ในส่วนการเล่นของ ห้องปฏิบัติการที่ 1 นักเรียน ฝึกสร้างโครงการที่เคลื่อนย้ายหุ่นยนต์ 123 ตัวบนสนาม 123 สนาม ในกิจกรรม เล่นส่วนที่ 2 นักเรียนสร้างโครงการเพื่อให้หุ่นยนต์ 123 ทำท่าเต้น นี่เป็นตัวอย่างของโซลูชันที่เป็นไปได้สำหรับโครงการท่าเต้นสำหรับห้องปฏิบัติการที่ 1 ลำดับของการกดปุ่มจากซ้ายไปขวา
| 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|
|
|
|
|
|
|
- การเรียงลำดับเป็นจุดสนใจของห้องปฏิบัติการ 2 นักเรียนควรระบุว่าลำดับที่พวกเขากดปุ่มคือลำดับที่หุ่นยนต์ 123 จะกระทำพฤติกรรม ในการปรับห้องปฏิบัติการ 2 ให้นักเรียนกดปุ่มลำดับเพื่อกำหนดรหัสหุ่นยนต์ 123 เพื่อย้ายจากจุดเริ่มต้นไปยังสมบัติบนแผนที่ของพวกเขา นี่คือทางออกที่เป็นไปได้สำหรับการเข้าถึงสมบัติในแผนที่สมบัติตัวอย่างการมีส่วนร่วมและการเล่นส่วนที่ 1 ตัวอย่างด้านล่างแสดงลำดับการกดปุ่มจากซ้ายไปขวา
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|
|
|
|
|
|
|
|