
ตอนนี้คุณได้สำรวจการเขียนโค้ดด้วยเซ็นเซอร์ AI Vision บนหุ่นยนต์เขียนโค้ด VEX AIM ของคุณแล้ว ถึงเวลาทดสอบทักษะของคุณแล้ว! ในหน่วยนี้ คุณจะได้เรียนรู้ว่า AI Vision Sensor สามารถใช้ข้อมูลภาพเพื่อโต้ตอบกับวัตถุในสภาพแวดล้อมได้อย่างไร คุณหันไปและได้รับถังและย้ายพวกเขาไปยัง AprilTags โดยใช้ข้อมูลเซ็นเซอร์ ตอนนี้ถึงเวลาที่จะนำทุกสิ่งที่คุณเรียนรู้มาใช้กับความท้าทายเรื่องลูกบอลกีฬาแล้ว! คุณจะร่วมมือกับกลุ่มของคุณเพื่อวางแผนกลยุทธ์ในการหยิบและเตะลูกบอลกีฬาทั้งสองประเภทเข้าประตู จากนั้นคุณจะทำงานร่วมกันเพื่อเขียนโค้ดหุ่นยนต์เพื่อทำภารกิจให้สำเร็จ โดยทำซ้ำในโปรเจ็กต์ของคุณเพื่อให้ได้ทั้งสองเป้าหมายโดยเร็ว
ทบทวนความท้าทายโดยชมวิดีโอด้านล่าง และคิดว่าคุณจะทำความท้าทายนี้ร่วมกับกลุ่มของคุณได้อย่างไร
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามด้านล่างนี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน
- คุณมีแนวคิดเริ่มต้นอย่างไรในการทำให้ความท้าทายนี้สำเร็จ? ระบุแนวคิดอย่างน้อยสองข้อในวารสารของคุณพร้อมรายละเอียด
- ทำไมคุณถึงคิดว่ากลยุทธ์นั้นจะประสบความสำเร็จ? ใช้สิ่งที่คุณได้เรียนรู้ตลอดทั้งหน่วยและหลักสูตรเพื่อสนับสนุนข้อความยืนยันของคุณ
- คุณคิดว่ามีวิธีอื่นในการทำความท้าทายนี้ให้สำเร็จหรือไม่? ทำไมหรือทำไมไม่?
- คุณมีคำถามอะไรเกี่ยวกับความท้าทายนี้บ้าง? ระบุอย่างน้อยสองรายการในวารสารของคุณ
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามด้านล่างนี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน
- คุณมีแนวคิดเริ่มต้นอย่างไรในการทำให้ความท้าทายนี้สำเร็จ? ระบุแนวคิดอย่างน้อยสองข้อในวารสารของคุณพร้อมรายละเอียด
- ทำไมคุณถึงคิดว่ากลยุทธ์นั้นจะประสบความสำเร็จ? ใช้สิ่งที่คุณได้เรียนรู้ตลอดทั้งหน่วยและหลักสูตรเพื่อสนับสนุนข้อความยืนยันของคุณ
- คุณคิดว่ามีวิธีอื่นในการทำความท้าทายนี้ให้สำเร็จหรือไม่? ทำไมหรือทำไมไม่?
- คุณมีคำถามอะไรเกี่ยวกับความท้าทายนี้บ้าง? ระบุอย่างน้อยสองรายการในวารสารของคุณ
หลังจากที่นักเรียนดูวิดีโอแล้ว ให้มารวมกันเพื่ออภิปรายทั้งชั้นเรียน ให้แน่ใจว่านักเรียนเข้าใจเป้าหมายของความท้าทายอย่างชัดเจนก่อนที่จะเริ่มต้น และใช้คำตอบของคำถามเป็นพื้นฐานสำหรับการอภิปราย
แนะนำให้นักเรียนคิดหาวิธีควบคุมความเร็วในการเตะลูกบอลกีฬาผ่านประตู พวกเขาสามารถนำสิ่งที่เรียนรู้เกี่ยวกับประสิทธิภาพ ความแม่นยำ และการเคลื่อนไหวของหุ่นยนต์มาประยุกต์ใช้เพื่อช่วยพวกเขาในการทำกิจกรรมท้าทายแบบจับเวลาได้
เตือนนักเรียนว่าพวกเขาสามารถอ้างอิงบันทึกทั้งหมดในวารสารจากหลักสูตรทั้งหมดเพื่อใช้ประกอบความพยายามร่วมมือและการอภิปรายระหว่างการท้าทายได้
ทำภารกิจให้สำเร็จ
ตอนนี้คุณได้พูดคุยเกี่ยวกับความท้าทายแล้ว ถึงเวลาลองทำดู!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ของคุณตามที่แสดงที่นี่ 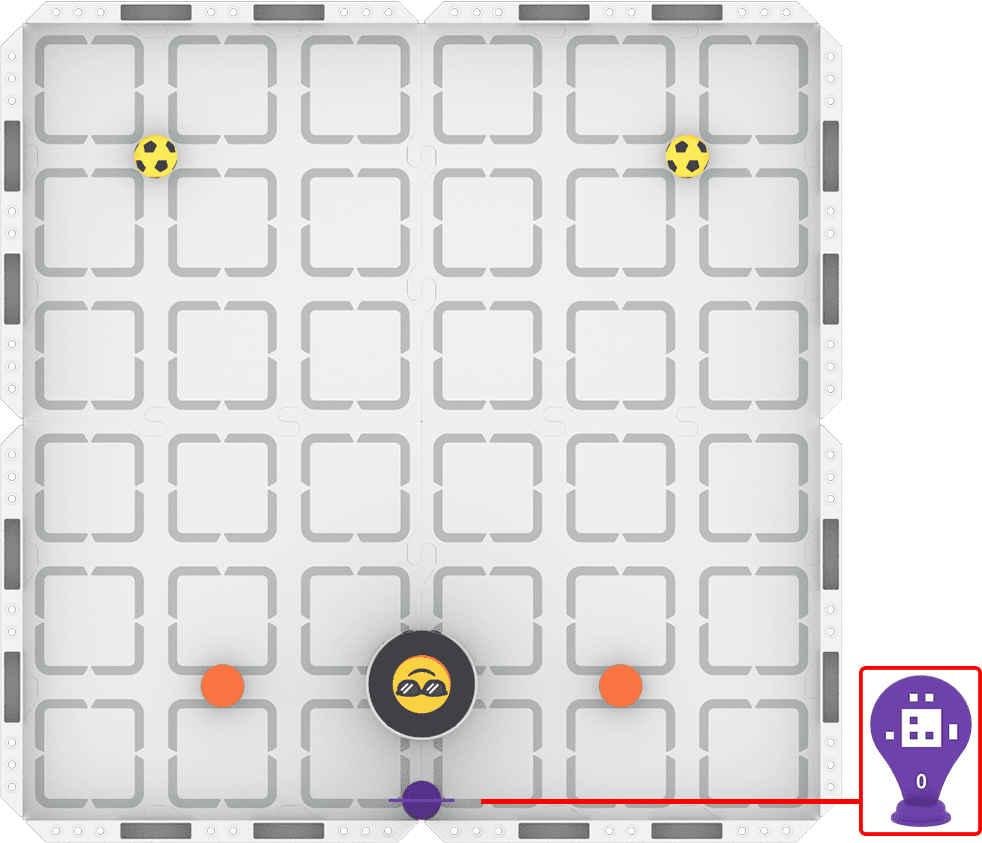
ขั้นตอน 2: สร้างแบบจำลองการเคลื่อนไหวของหุ่นยนต์ที่จำเป็นในการบรรลุความท้าทายโดยใช้โหมดขับเคลื่อน
- งานของคุณคือขับหุ่นยนต์หยิบและทำคะแนนลูกบอลกีฬาทั้งสองลูกด้วยการเตะระหว่างถังสีส้มให้เร็วที่สุด บันทึกกลยุทธ์การขับขี่ของคุณ และวางแผนว่าคุณจะเข้ารหัสการเคลื่อนไหวเหล่านั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการพัฒนากลยุทธ์ของคุณ
- เคล็ดลับสำหรับมืออาชีพ: บันทึกข้อมูลว่าคุณกำลังเคลื่อนย้ายหุ่นยนต์อย่างไร—คุณจะใช้ AI Vision ด้วยปุ่มขึ้นเมื่อใดเมื่อเทียบกับการขับเคลื่อนด้วยตนเอง สิ่งนี้สามารถช่วยคุณพัฒนาแผนของคุณได้
ขั้นตอน 3: เขียนโค้ดหุ่นยนต์เพื่อทำภารกิจให้สำเร็จ
- งานของคุณคือใช้กลยุทธ์และแผนที่แบ่งปันซึ่งคุณพัฒนาในขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์หยิบและเตะลูกบอลกีฬาทั้งสองลูกระหว่างถังสีส้มให้เร็วที่สุด
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางกระบวนการเขียนโค้ดของคุณ
- เคล็ดลับ: อย่าลืมคำนึงถึงความเร็วที่หุ่นยนต์ของคุณเคลื่อนที่และหมุนหากคุณประสบปัญหาในการตรวจจับวัตถุอย่างน่าเชื่อถือ ลองลดความเร็วเพื่อปรับปรุงความน่าเชื่อถือของเซ็นเซอร์
ขั้นตอนที่ 4: สำรวจ! สลับไปมาระหว่างการขับรถและการเขียนโค้ดเพื่อทำซ้ำในโครงการของคุณและปรับปรุงเวลาของคุณ!
- ระดมความคิดร่วมกับกลุ่มของคุณเพื่อหาแนวทางในการปรับปรุงความน่าเชื่อถือและความแม่นยำของการเตะประตูของคุณ
- ขับหุ่นยนต์เพื่อทดสอบแนวคิดต่างๆ และสำรวจข้อมูล AI Vision ที่คุณสามารถใช้ในการให้คะแนนได้
- ทำซ้ำในโครงการของคุณและรันซ้ำๆ เพื่อดูว่าความน่าเชื่อถือและความเร็วโดยรวมดีขึ้นตามที่คุณตั้งใจไว้
- เดินหน้าระหว่างการขับรถและการเขียนโค้ดเพื่อค้นหาแนวทางที่ดีที่สุดในการบรรลุความท้าทายให้เร็วที่สุด!
ตอนนี้คุณได้พูดคุยเกี่ยวกับความท้าทายแล้ว ถึงเวลาลองทำดู!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ของคุณตามที่แสดงที่นี่
ขั้นตอน 2: สร้างแบบจำลองการเคลื่อนไหวของหุ่นยนต์ที่จำเป็นในการบรรลุความท้าทายโดยใช้โหมดขับเคลื่อน
- งานของคุณคือขับหุ่นยนต์หยิบและทำคะแนนลูกบอลกีฬาทั้งสองลูกด้วยการเตะระหว่างถังสีส้มให้เร็วที่สุด บันทึกกลยุทธ์การขับขี่ของคุณ และวางแผนว่าคุณจะเข้ารหัสการเคลื่อนไหวเหล่านั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการพัฒนากลยุทธ์ของคุณ
- เคล็ดลับสำหรับมืออาชีพ: บันทึกข้อมูลว่าคุณกำลังเคลื่อนย้ายหุ่นยนต์อย่างไร—คุณจะใช้ AI Vision ด้วยปุ่มขึ้นเมื่อใดเมื่อเทียบกับการขับเคลื่อนด้วยตนเอง สิ่งนี้สามารถช่วยคุณพัฒนาแผนของคุณได้
ขั้นตอน 3: เขียนโค้ดหุ่นยนต์เพื่อทำภารกิจให้สำเร็จ
- งานของคุณคือใช้กลยุทธ์และแผนที่แบ่งปันซึ่งคุณพัฒนาในขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์หยิบและเตะลูกบอลกีฬาทั้งสองลูกระหว่างถังสีส้มให้เร็วที่สุด
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางกระบวนการเขียนโค้ดของคุณ
- เคล็ดลับ: อย่าลืมคำนึงถึงความเร็วที่หุ่นยนต์ของคุณเคลื่อนที่และหมุนหากคุณประสบปัญหาในการตรวจจับวัตถุอย่างน่าเชื่อถือ ลองลดความเร็วเพื่อปรับปรุงความน่าเชื่อถือของเซ็นเซอร์
ขั้นตอนที่ 4: สำรวจ! สลับไปมาระหว่างการขับรถและการเขียนโค้ดเพื่อทำซ้ำในโครงการของคุณและปรับปรุงเวลาของคุณ!
- ระดมความคิดร่วมกับกลุ่มของคุณเพื่อหาแนวทางในการปรับปรุงความน่าเชื่อถือและความแม่นยำของการเตะประตูของคุณ
- ขับหุ่นยนต์เพื่อทดสอบแนวคิดต่างๆ และสำรวจข้อมูล AI Vision ที่คุณสามารถใช้ในการให้คะแนนได้
- ทำซ้ำในโครงการของคุณและรันซ้ำๆ เพื่อดูว่าความน่าเชื่อถือและความเร็วโดยรวมดีขึ้นตามที่คุณตั้งใจไว้
- เดินหน้าระหว่างการขับรถและการเขียนโค้ดเพื่อค้นหาแนวทางที่ดีที่สุดในการบรรลุความท้าทายให้เร็วที่สุด!
ให้แน่ใจว่านักเรียนมีความชัดเจนเกี่ยวกับความคาดหวังในการท้าทาย ทั้งในด้านความร่วมมือและการไหลของความท้าทาย เตือนนักเรียนเกี่ยวกับบทบาทและกลยุทธ์การตัดสินใจที่ประสบความสำเร็จในการท้าทายครั้งก่อน
แจกบัตรงานขั้นตอนที่ 2 หมายเลข (Google / .docx / .pdf) ให้กับนักเรียนเพื่อเป็นแนวทางให้พวกเขาผ่านส่วนการขับเคลื่อนและการวางแผนของความท้าทายนี้ เตือนนักเรียนว่าพวกเขาสามารถตรวจสอบวิดีโอบทเรียนหรือบันทึกได้ตลอดเวลาเพื่อทบทวนแนวคิดหรือเนื้อหาเพื่อช่วยให้พวกเขาทำภารกิจนี้ให้สำเร็จ
ในขณะที่นักเรียนกำลังขับรถและวางกลยุทธ์ ให้เดินไปรอบๆ ห้องเพื่อร่วมอภิปรายเกี่ยวกับความเข้าใจของพวกเขาเกี่ยวกับ AI Vision Sensor ถามคำถามเช่น:
- อธิบายวิธีการทำงานของเซ็นเซอร์ AI Vision ขณะที่คุณกำลังทำภารกิจให้เสร็จ คุณรู้ได้ยังไง?
- การใช้เซ็นเซอร์ส่งผลต่อวิธีการพัฒนาและบันทึกกลยุทธ์ของคุณอย่างไร?
- คุณนำสิ่งที่คุณเรียนรู้เกี่ยวกับความแม่นยำมาประยุกต์ใช้ในการทำงานนี้ให้สำเร็จได้อย่างไร คุณจำเป็นต้องคำนึงถึงความแม่นยำเมื่อใช้เซ็นเซอร์หรือไม่? ทำไมหรือทำไมไม่?
แจกบัตรงานขั้นตอนที่ (Google / .docx / .pdf) ให้กับนักเรียนหลังจากที่พวกเขาได้เช็คอินกับคุณแล้วและบรรลุเกณฑ์ความสำเร็จในการขับรถและการวางแผน
เดินไปรอบๆ ห้องในขณะที่นักเรียนกำลังสร้างและทดสอบโครงการของตน เพื่อตรวจสอบกระบวนการและความคืบหน้าในการรับมือกับความท้าทายดังกล่าว ถามคำถามเช่น:
- คุณเคยเตะลูกบอลกีฬาได้สำเร็จกี่ครั้งแล้ว? ขั้นตอนต่อไปของคุณในการบรรลุความท้าทายนี้คืออะไร?
- โปรเจ็กต์ของคุณใช้ข้อมูลจาก AI Vision Sensor เพื่อทำงานให้สำเร็จได้อย่างไร คุณรู้ได้ยังไง?
- มีวิธีอื่นที่คุณสามารถใช้ AI Vision Sensor เพื่อทำภารกิจนี้ให้สำเร็จหรือไม่ ทำไมหรือทำไมไม่?
สามารถไปต่อที่ขั้นตอนที่ 4 ได้เมื่อมีโครงการเขียนโค้ดที่ทำให้ความท้าทายนี้เสร็จสมบูรณ์ พวกเขาควรสลับไปมาระหว่างการระดมความคิด การขับเคลื่อน และการเขียนโค้ดเพื่อทำซ้ำในโครงการของตนเพื่อให้ทำงานเสร็จภายในเวลาที่น้อยลง หรือปรับปรุงความน่าเชื่อถือหรือความแม่นยำของโครงการ ให้แน่ใจว่ากลุ่มต่างๆ เห็นด้วยกับสิ่งที่พวกเขากำลังพยายามปรับปรุงก่อนที่จะทดสอบแนวคิดของพวกเขา
ขณะที่คุณเคลื่อนที่ไปรอบ ๆ ห้องในขณะที่นักเรียนกำลังทำซ้ำ ให้ถามคำถามเช่น:
- หุ่นยนต์ของคุณให้คะแนนลูกบอลกีฬาทั้งสองลูกได้น่าเชื่อถือเพียงใด หากคุณรันโปรเจ็กต์ของคุณหลายครั้ง เวลาจะเท่ากันทุกครั้งหรือไม่? ทำไมหรือทำไมไม่?
- คุณจะสามารถนำความรู้เกี่ยวกับการเคลื่อนไหวของหุ่นยนต์มาประยุกต์ใช้เพื่อช่วยให้โครงการของคุณมีประสิทธิภาพมากขึ้นได้อย่างไร
- อธิบายเป้าหมายสำหรับแนวคิดการวนซ้ำของคุณ คุณคิดว่าทำไมการเปลี่ยนแปลงจึงจะบรรลุเป้าหมายนั้นได้?
ในการท้าทายหน่วย คุณสามารถกำหนดเวลาที่จะยุติการท้าทายและเปลี่ยนผ่านนักเรียนไปสู่การแบ่งปันการเรียนรู้ของพวกเขา เมื่อคุณรู้สึกว่าทุกกลุ่มมีเวลาทำภารกิจท้าทายให้สำเร็จอย่างมีประสิทธิภาพและต่อเนื่องแล้ว ให้สรุปขั้นตอนภารกิจท้าทายและดำเนินการแบ่งปันกลยุทธ์ต่อไป
แบ่งปันกลยุทธ์ของคุณ
เมื่อทุกคนทำความท้าทายเสร็จสิ้นแล้ว ก็ถึงเวลาแบ่งปันกลยุทธ์ของคุณกับชั้นเรียน ในการเตรียมความพร้อมสำหรับเซสชันการแบ่งปันนี้ ให้ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณ:
- อธิบายกลยุทธ์ของคุณสำหรับความท้าทายนี้ เพราะอะไรถึงคิดว่าประสบความสำเร็จ?
- การทำซ้ำครั้งใดที่คุณทำกับโครงการของคุณมีผลกระทบมากที่สุด? มันมีประโยชน์เพราะอะไร?
- คุณนำสิ่งที่เรียนรู้เกี่ยวกับ AI Vision Sensor มาประยุกต์ใช้เพื่อทำภารกิจนี้ให้สำเร็จได้อย่างไร
- คุณคิดว่ากลยุทธ์ของคุณเป็นวิธีที่ดีที่สุดในการบรรลุความท้าทายนี้หรือไม่? ทำไมหรือทำไมไม่?
เมื่อทุกคนทำความท้าทายเสร็จสิ้นแล้ว ก็ถึงเวลาแบ่งปันกลยุทธ์ของคุณกับชั้นเรียน ในการเตรียมความพร้อมสำหรับเซสชันการแบ่งปันนี้ ให้ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณ:
- อธิบายกลยุทธ์ของคุณสำหรับความท้าทายนี้ เพราะอะไรถึงคิดว่าประสบความสำเร็จ?
- การทำซ้ำครั้งใดที่คุณทำกับโครงการของคุณมีผลกระทบมากที่สุด? มันมีประโยชน์เพราะอะไร?
- คุณนำสิ่งที่เรียนรู้เกี่ยวกับ AI Vision Sensor มาประยุกต์ใช้เพื่อทำภารกิจนี้ให้สำเร็จได้อย่างไร
- คุณคิดว่ากลยุทธ์ของคุณเป็นวิธีที่ดีที่สุดในการบรรลุความท้าทายนี้หรือไม่? ทำไมหรือทำไมไม่?
เมื่อทุกคนทำความท้าทายเสร็จสิ้นแล้ว ให้มารวมตัวกันเพื่อแบ่งปันกลยุทธ์และหารือกันทั้งชั้นเรียน เตือนใจนักเรียนถึงความคาดหวังสำหรับการสนทนาอย่างเคารพซึ่งกันและกันและกลยุทธ์การฟังอย่างตั้งใจ
เมื่อสิ้นสุดการอภิปราย นักเรียนควรได้ดูกลยุทธ์ทั้งหมดแล้ว และมีส่วนร่วมในการอภิปรายเพื่อหาฉันทามติว่าแนวทางที่ดีที่สุดสำหรับความท้าทายนี้หมายถึงอะไรสำหรับพวกเขา กระตุ้นให้ผู้เรียนคิดว่า "ดีที่สุด" หมายความว่าอย่างไรในบริบทของความท้าทายนี้ เวลาเป็นสิ่งสำคัญ แต่มีปัจจัยหรือเกณฑ์อื่นใดอีกบ้างที่สามารถนำมาใช้ได้? หากนักเรียนประสบปัญหาในการระบุเกณฑ์อื่นๆ ให้ถามว่าพวกเขาจะใช้เกณฑ์ใดในการตัดสินใจหากโครงการสองโครงการเสร็จสิ้นในเวลาเดียวกัน
สะท้อนและแบ่งปัน
ในช่วงเริ่มต้นของหน่วยนี้ คุณได้ร่วมสร้างเป้าหมายการเรียนรู้กับครูของคุณ เมื่อคุณทำภารกิจสำเร็จแล้ว ก็ถึงเวลาทบทวนความก้าวหน้าของคุณในการบรรลุเป้าหมายการเรียนรู้เหล่านั้น
สำหรับเป้าหมายการเรียนรู้แต่ละข้อของคุณ ให้กรอกประโยคต่อไปนี้ลงในสมุดบันทึกของคุณ:
- ตอนแรกฉันคิดว่า ________ เพราะว่า ________.
- ตอนนี้เราได้ทำภารกิจท้าทายเสร็จแล้ว ฉันเข้าใจแล้ว ________.
- หลักฐานของฉันสำหรับความเข้าใจนี้คือ ________ ซึ่งแสดงให้เห็นว่า ________
เช็คอินกับครูของคุณเมื่อคุณทำประโยคเสร็จสำหรับแต่ละเป้าหมายการเรียนรู้แล้ว การสะท้อนคิดนี้จะช่วยให้คุณแบ่งปันการเรียนรู้ของคุณ
ในช่วงเริ่มต้นของหน่วยนี้ คุณได้ร่วมสร้างเป้าหมายการเรียนรู้กับครูของคุณ เมื่อคุณทำภารกิจสำเร็จแล้ว ก็ถึงเวลาทบทวนความก้าวหน้าของคุณในการบรรลุเป้าหมายการเรียนรู้เหล่านั้น
สำหรับเป้าหมายการเรียนรู้แต่ละข้อของคุณ ให้กรอกประโยคต่อไปนี้ลงในสมุดบันทึกของคุณ:
- ตอนแรกฉันคิดว่า ________ เพราะว่า ________.
- ตอนนี้เราได้ทำภารกิจท้าทายเสร็จแล้ว ฉันเข้าใจแล้ว ________.
- หลักฐานของฉันสำหรับความเข้าใจนี้คือ ________ ซึ่งแสดงให้เห็นว่า ________
เช็คอินกับครูของคุณเมื่อคุณทำประโยคเสร็จสำหรับแต่ละเป้าหมายการเรียนรู้แล้ว การสะท้อนคิดนี้จะช่วยให้คุณแบ่งปันการเรียนรู้ของคุณ
เมื่อนักเรียนทำการสะท้อนความคิดลงในสมุดบันทึกเสร็จแล้ว ให้มารวมตัวกันเพื่ออภิปรายทั้งชั้นเรียน เชิญชวนนักเรียนให้แบ่งปันสิ่งที่พวกเขาเขียนในวารสารของพวกเขา และแนะนำนักเรียนไปสู่ข้อสรุปร่วมกันเกี่ยวกับความเข้าใจของแต่ละหน่วยหรือเป้าหมายการเรียนรู้ ถามคำถามเช่น:
- คำอธิบายนั้นสอดคล้องกับสิ่งที่คุณสังเกตและบันทึกไว้ในหน่วยหรือไม่ ทำไมหรือทำไมไม่?
- มีรายละเอียดอื่นๆ ที่เราสามารถเพิ่มลงในคำอธิบายนั้นเพื่อให้ดีขึ้นได้หรือไม่? พวกมันคืออะไรและทำไมมันถึงมีประโยชน์?
- เราสามารถตกลงกันในแนวคิดร่วมกันหนึ่งแนวคิดได้หรือไม่ โดยอาศัยหลักฐานและการอภิปรายร่วมกันตลอดทั้งหน่วย? ทำไมหรือทำไมไม่?
เมื่อคุณได้แนะนำให้ผู้เรียนรวมความคิดเกี่ยวกับความเข้าใจในแต่ละหน่วยแล้ว คุณอาจต้องการสร้างหรือเพิ่มหลักฐานการเรียนรู้ของผู้เรียนรอบๆ ห้องเรียน เพื่อให้ผู้เรียนสามารถอ้างอิงเพื่อก้าวไปข้างหน้า
ในที่สุด นักเรียนควรเชื่อมโยงการเรียนรู้ของตนกับการเชื่อมโยงโลกแห่งความเป็นจริงที่พวกเขาได้ระดมความคิดไว้ในช่วงเริ่มต้นของหน่วย แนะนำการสนทนาด้วยคำถามเช่น:
- การเรียนรู้ในหน่วยนี้ช่วยให้เราเข้าใจตัวอย่างในโลกแห่งความเป็นจริงที่เราพูดถึงก่อน นี้ได้ดีขึ้นอย่างไร
- คุณจะอธิบายการทำงานของเซ็นเซอร์ในโลกแห่งความเป็นจริงให้กับคนที่ไม่รู้จักหุ่นยนต์ฟังได้อย่างไร โดยอิงจากประสบการณ์ของคุณกับเซ็นเซอร์ AI Vision (คำตอบของนักเรียนจะแตกต่างกันไปขึ้นอยู่กับประสบการณ์ที่เกี่ยวข้องของพวกเขา)
เลือก กลับไปยังหน่วย > เพื่อกลับไปยังหน่วยทั้งหมด