
ฝึกฝน
ในส่วนที่แล้วคุณได้เรียนรู้เกี่ยวกับองค์ประกอบของแขนหุ่นยนต์และกลไกแขนที่แตกต่างกัน ทำงานอย่างไร ตอนนี้คุณจะนำสิ่งที่คุณได้เรียนรู้ไปใช้ในการทำซ้ำในการสร้างเพื่อทำกิจกรรมการฝึกพัฒนาแขนของคุณให้เสร็จสมบูรณ์
ในกิจกรรมนี้หุ่นยนต์ของคุณจะต้องขับรถไป ที่บัคกี้บอลหยิบบัคกี้บอลขึ้นมาแล้ว ยกขึ้นแล้ววางไว้บนวงแหวน คุณจะทำซ้ำในการออกแบบแขนเพื่อปรับปรุงความสามารถของหุ่นยนต์ของคุณในการซ้อนบัคกี้บอลลงบนวงแหวน ดูวิดีโอด้านล่างเพื่อดูว่าท่านจะประยุกต์ใช้สิ่งที่ได้เรียนรู้เพื่อทำกิจกรรมการฝึกพัฒนาแขนของท่านได้อย่างไร
ตอนนี้ถึงตาคุณแล้วที่จะทำกิจกรรมฝึกฝนพัฒนาแขนของคุณ!
ในแอนิเมชันนี้ตัวควบคุมจะใช้เพื่อขับเคลื่อนหุ่นยนต์ไปยังบัคกี้บอลหยิบขึ้นมาจากนั้นยกบัคกี้บอลขึ้นและวางไว้บนวงแหวน ภาพเคลื่อนไหวนี้แสดงให้เห็นถึงวิธีหนึ่งที่หุ่นยนต์ของคุณสามารถเคลื่อนไหวเพื่อทำกิจกรรมฝึกพัฒนาแขนของคุณให้เสร็จสมบูรณ์
ใช้เอกสารนี้เป็นเอกสารอ้างอิงเพื่อทำกิจกรรมการฝึกฝนให้เสร็จสมบูรณ์
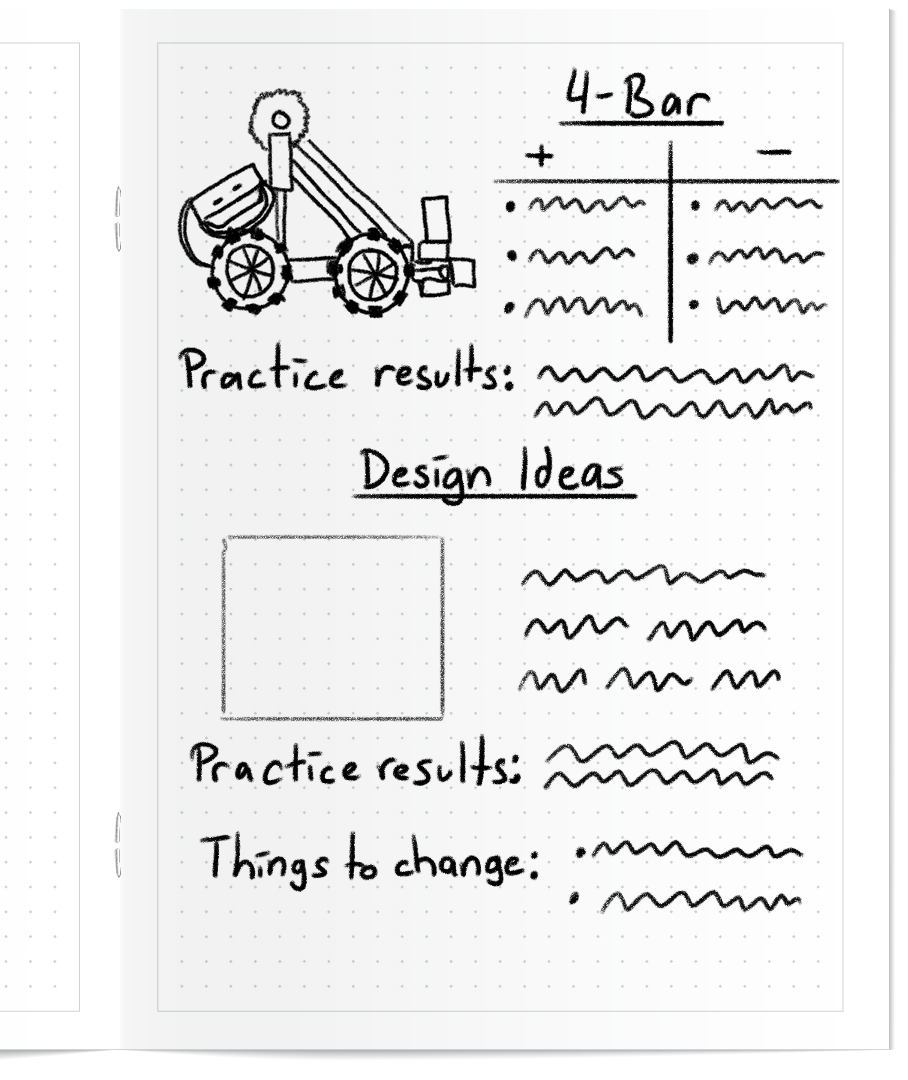
ในขณะที่คุณทำกิจกรรมฝึกฝนการปรับปรุงแขนของคุณให้บันทึกสิ่งต่อไปนี้ลงในสมุดบันทึกวิศวกรรมของคุณ:
- อธิบายและแสดงให้เห็นถึงการออกแบบหุ่นยนต์ของคุณ
- การออกแบบกรงเล็บและแขนของคุณทำงานร่วมกันเพื่อทำกิจกรรมให้เสร็จได้อย่างไร?
- คุณจะทำซ้ำในการออกแบบนี้เพื่อปรับปรุงประสิทธิภาพของหุ่นยนต์ได้อย่างไร?
ดูภาพด้านซ้ายเพื่อดูตัวอย่างว่าท่านจะบันทึกแนวคิดและการทดสอบการออกแบบของท่านได้อย่างไร
การออกแบบแขน
ในส่วนการเรียนรู้คุณได้เรียนรู้เกี่ยวกับการออกแบบแขนแบบต่างๆและได้แสดงภาพเคลื่อนไหวเหล่านี้ ในระหว่างวิดีโอ ใช้ภาพเคลื่อนไหวแขนด้านล่างนี้เพื่ออ้างอิงในขณะที่ทำซ้ำบนการออกแบบแขนของคุณ
สวิงอาร์ม
สวิงอาร์มเป็นหนึ่งในแขนที่ง่ายที่สุดในการประกอบ ปลายแขนตามแนวโค้งขณะที่เฟืองหมุนและสามารถผ่านด้านบนและไปถึงอีกด้านหนึ่งของหุ่นยนต์ตามที่แสดงในภาพเคลื่อนไหวนี้
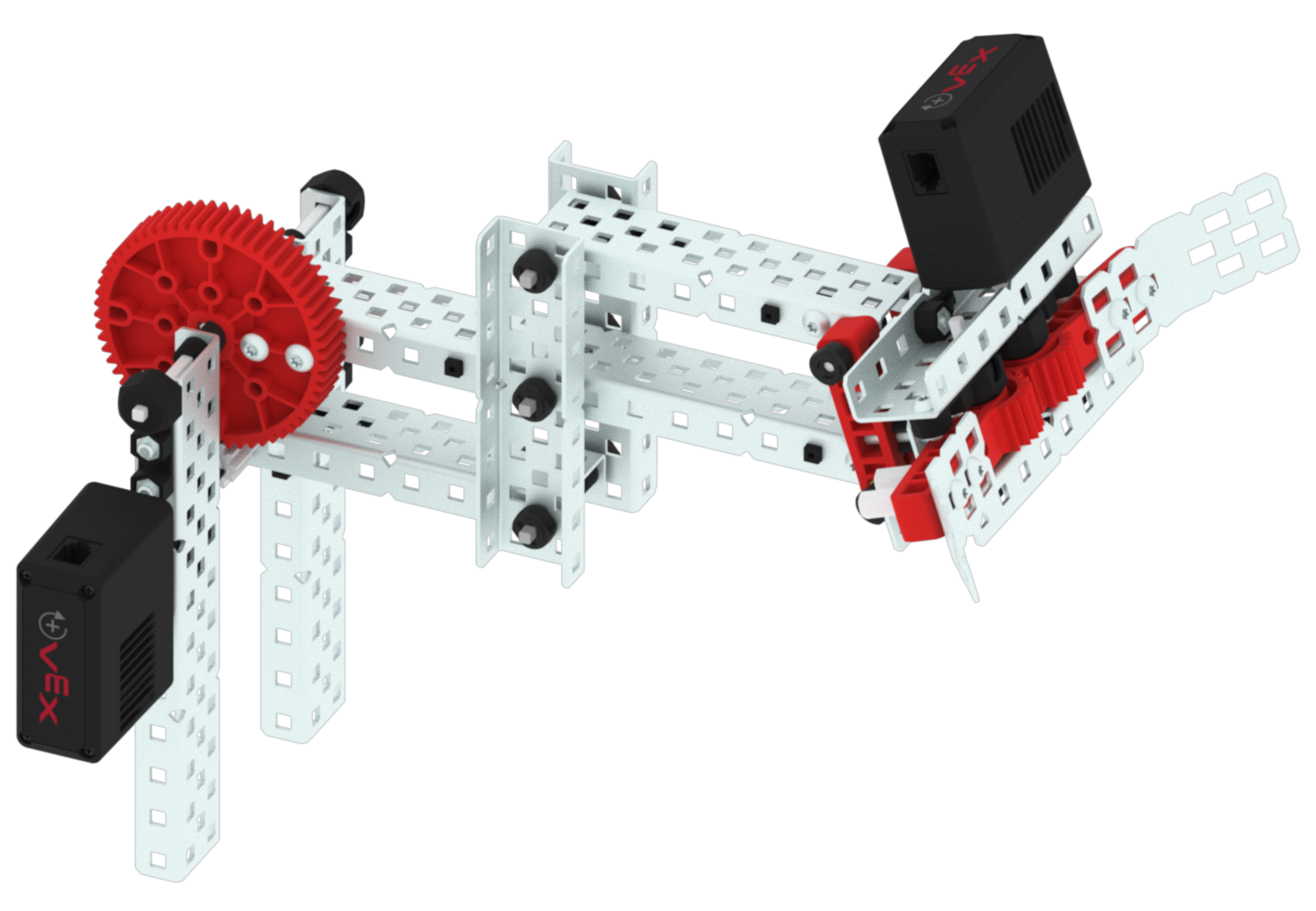
แขน 4 บาร์
แขนนี้ถูกสร้างขึ้นจากการเชื่อมต่อแบบขนานที่ช่วยให้วัตถุที่ถูกยกขึ้นอยู่ในระดับที่ยังคงอยู่ดังที่แสดงในภาพเคลื่อนไหว นี่คือการออกแบบแขนที่ใช้ในคำแนะนำในการสร้าง Clawbot
แขน 6 บาร์
แขนนี้เป็นส่วนขยายของแขน 4 แท่งดังที่แสดงในภาพเคลื่อนไหวนี้ ในขณะที่มันสามารถเข้าถึงได้สูงกว่า 4 บาร์แต่นี่เป็นแขนที่ยากต่อการสร้างเนื่องจากจำนวนชิ้นส่วนและจุดหมุน
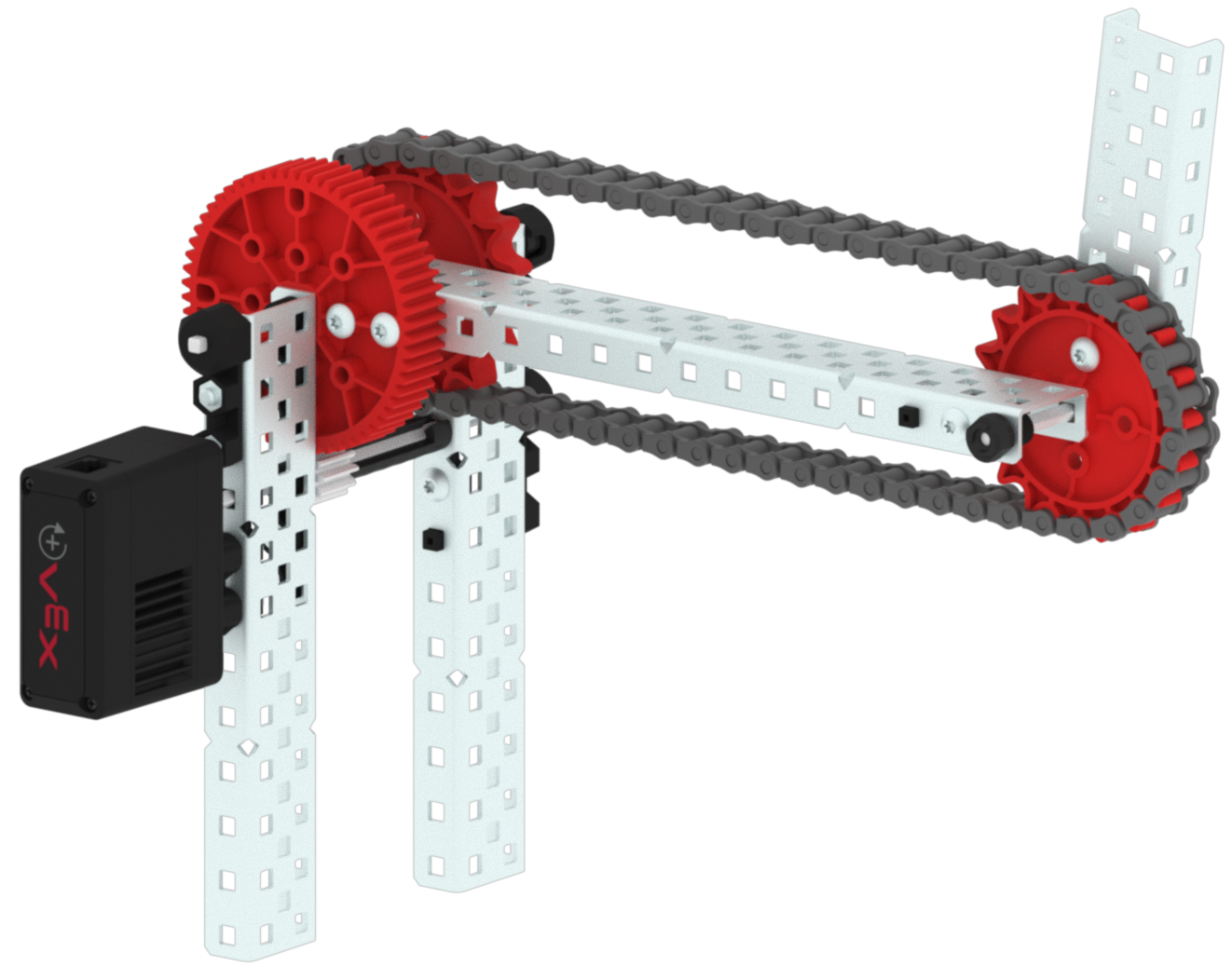
แขนโซ่ - บาร์
แขนนี้ถูกสร้างขึ้นจากเฟืองและโซ่เพื่อสร้างแขนเชื่อมต่อดังที่แสดงไว้ในภาพเคลื่อนไหวนี้ ซึ่งส่วนใหญ่จะใช้กับผู้บงการแบบพาสซีฟเหมือนตัก
เตรียมพร้อมสำหรับการท้าทาย
ในการแข่งขัน (ในหน้าถัดไป) คุณจะได้ทดสอบการออกแบบแขนของคุณในการท้าทายแบบเรียงซ้อน เรียนรู้วิธีการแข่งขันในความท้าทายตรวจสอบความเข้าใจของคุณจากนั้นฝึกฝนเพื่อความท้าทาย
เป้าหมายของความท้าทายนี้คือการใช้ตัวควบคุมเพื่อขับเคลื่อนหุ่นยนต์ของคุณและวางบัคกี้บอลลงบนวงแหวนให้มากที่สุดเท่าที่จะทำได้ภายในหนึ่งนาที
ดูภาพเคลื่อนไหวนี้เพื่อดูตัวอย่างของ Clawbot ที่ซ้อนบัคกี้บอลลงบนวงแหวนใน Stacked Up Challenge
ทำตามขั้นตอนในเอกสารนี้เพื่อเรียนรู้เพิ่มเติมเกี่ยวกับวิธีทำภารกิจนี้ให้สำเร็จ
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะเริ่มความท้าทายตรวจสอบให้แน่ใจว่าคุณเข้าใจกฎและการตั้งค่าความท้าทายโดยการตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของคุณ
หลังจากตอบคำถามเสร็จแล้วให้ลองฝึกความท้าทาย
เลือก ถัด > ไปเพื่อแข่งขันใน Stacked Up Challenge