
Pratik
Son bölümde bir robot kolunun elemanlarını ve farklı kol mekanizmalarının nasıl çalıştığını öğrendiniz. Şimdi öğrendiklerinizi, Kolunuzu Geliştirme egzersiz etkinliğini tamamlamak için yapı üzerinde yineleme yaparak uygulayacaksınız.
Bu aktivitede robotunuz bir Buckyball'a doğru gidecek, Buckyball'u alacak, kaldıracak ve ardından bir halkanın üzerine yerleştirecek. Robotunuzun Buckyball'uyerleştirme yeteneğini geliştirmek için kolun tasarımında yinelemeler yapacaksınız. Öğrendiklerinizi Kolunuzu Geliştirin uygulama etkinliğini tamamlamak için nasıl uygulayabileceğinizi görmek için aşağıdaki videoyu izleyin.
Şimdi Kolunuzu Geliştirin egzersiz aktivitesini tamamlama sırası sizde!
Bu animasyonda, bir Kontrolcü robotu Buckyball'a götürmek, onu almak, sonra Buckyball'u kaldırmak ve halkanın üstüne yerleştirmek için kullanılıyor. Bu animasyon, robotunuzun Kolunuzu Geliştirin alıştırma etkinliğini tamamlamak için hareket edebileceği olası bir yolu göstermektedir.
Bu belgeyi uygulama etkinliğini tamamlamak için referans olarak kullanın.
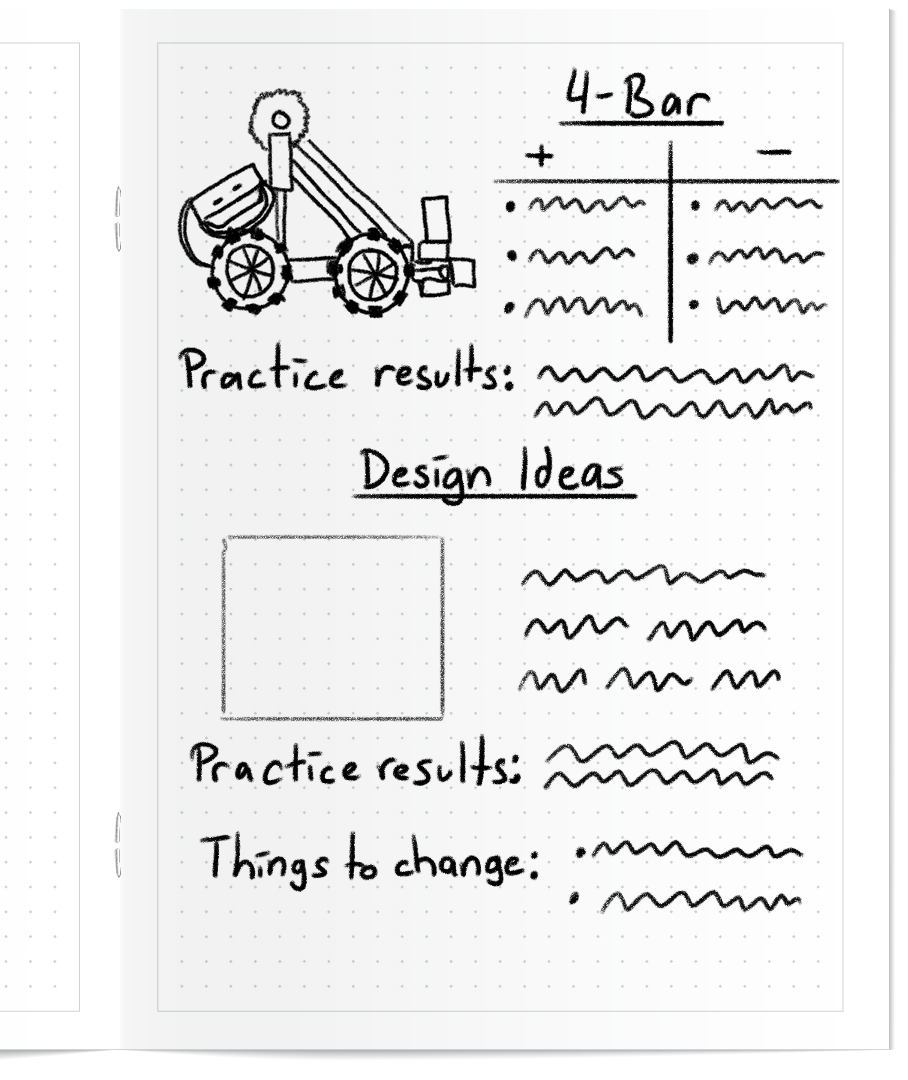
Kolunuzu Geliştirin uygulama etkinliğini tamamladığınızda, aşağıdakileri mühendislik not defterinize yazın:
- Robot tasarımınızı açıklayın ve resimlendirin.
- Pençe ve kol tasarımınız aktiviteyi tamamlamak için nasıl birlikte çalışıyor?
- Robotun performansını iyileştirmek için bu tasarım üzerinde nasıl yinelemeler yapabilirsiniz?
Tasarım fikirlerinizi ve testlerinizi nasıl kaydedebileceğinize dair bir örnek için soldaki görsele bakın.
Kol Tasarımları
Öğren bölümünde farklı kol tasarımları hakkında bilgi edindiniz ve videoda bu animasyonlar gösterildi. Kolunuzun tasarımı üzerinde çalışırken referans olarak aşağıdaki kol animasyonlarını kullanın.
Salıncak Kolu
Salıncak kolu montajı en kolay kollardan biridir. Kolun ucu, dişli döndükçe bir yay çizer ve animasyonda gösterildiği gibi üstünden geçip robotun diğer tarafına ulaşabilir.
4 Çubuklu Kol
Bu kol, animasyonda gösterildiği gibi kaldırılan nesnenin düz kalmasını sağlayan paralel bağlantılardan oluşur. Bu, Clawbot yapım talimatlarında kullanılan kol tasarımıdır.
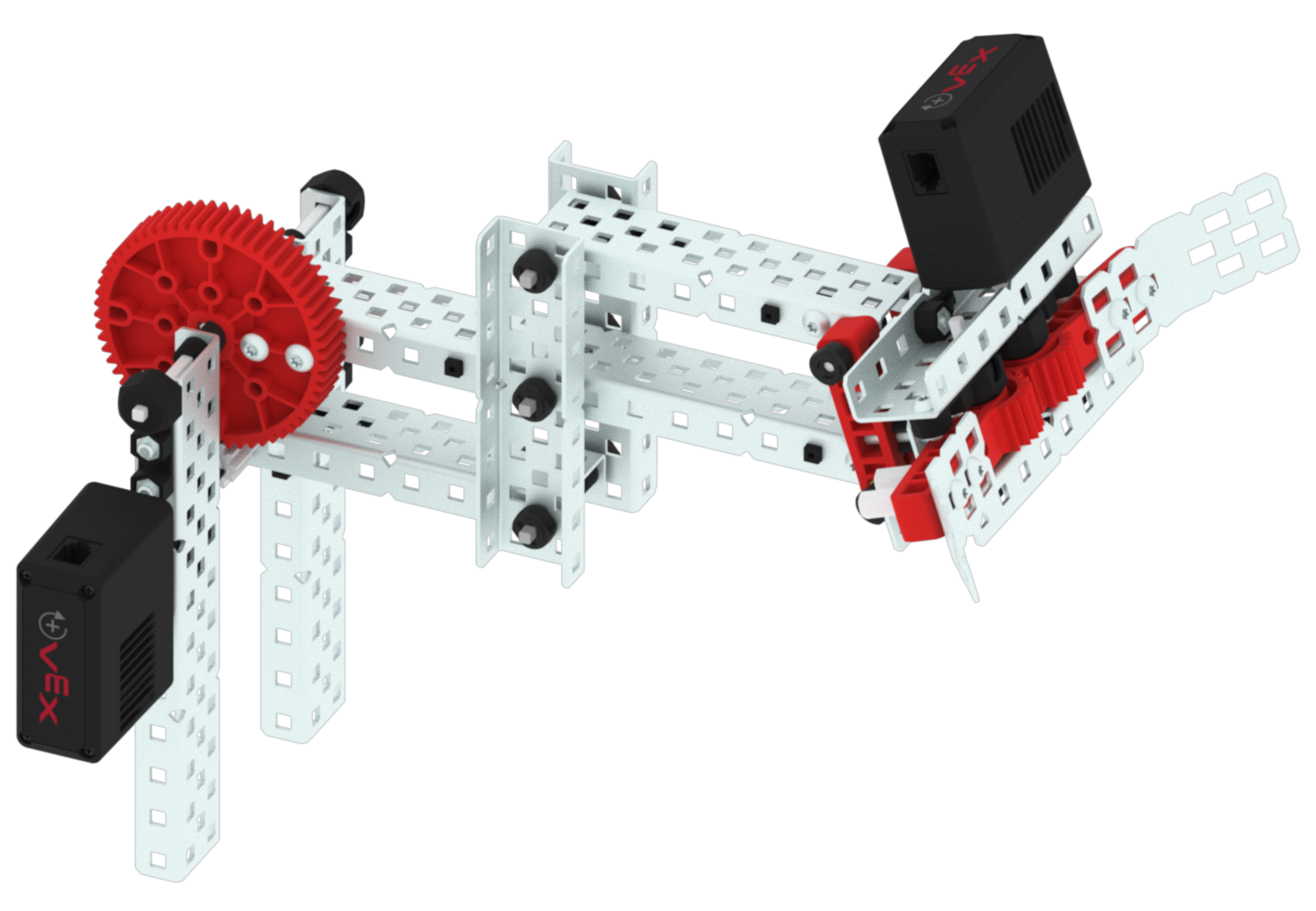
6 Çubuklu Kol
Bu kol, resimde görüldüğü gibi 4 çubuklu kolun bir uzantısıdır. 4 bardan daha yükseğe ulaşabilmesine rağmen, parça sayısı ve pivot noktalarının çokluğu nedeniyle yapımı zor bir koldur.
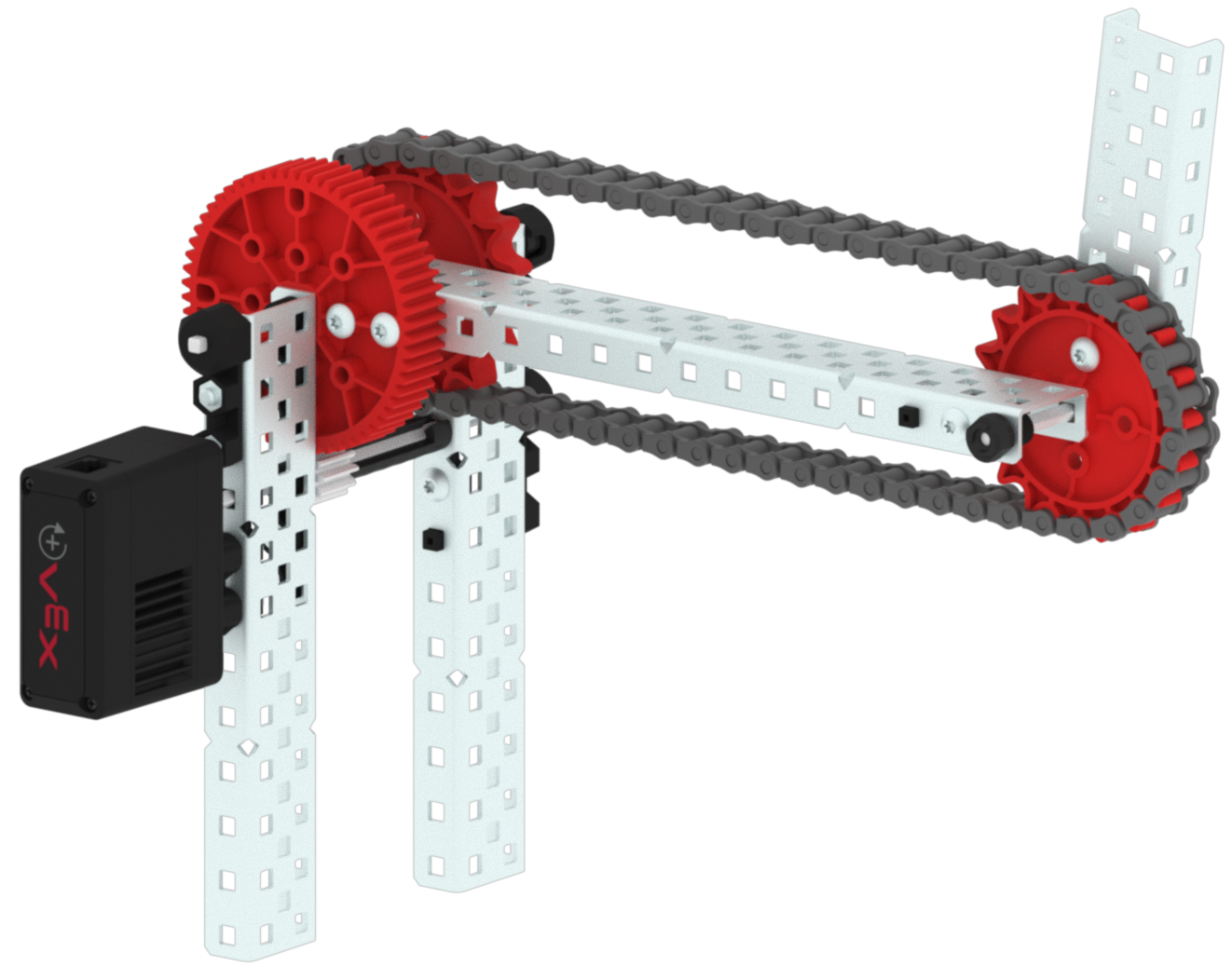
Zincir Çubuk Kolu
Bu kol, resimde görüldüğü gibi bir bağlantı kolu oluşturmak için dişlilerden ve zincirden oluşur. Bu, en geleneksel olarak kepçe gibi pasif manipülatörlerle kullanılır.
Meydan Okumaya Hazırlanın
Yarış bölümünde (bir sonraki sayfada), Stacked Up Challenge'da kol tasarımlarınızı test edeceksiniz. Yarışmaya nasıl katılacağınızı öğrenin, anladığınızı kontrol edin, ardından yarışmaya hazırlanın.
Bu mücadelenin amacı, Kontrolcüyü kullanarak robotunuzu sürmek ve bir dakika içinde mümkün olduğunca çok Buckyball'u halkalara yerleştirmektir.
Stacked Up Challenge'da bir Pençe Robotunun Buckyball'ları halkalara yığmasının örneğini görmek için bu animasyonu izleyin.
Bu zorluğun nasıl tamamlanacağı hakkında daha fazla bilgi edinmek için bu belgedeki adımları izleyin.
Anlayışınızı Kontrol Edin
Meydan okumaya başlamadan önce, aşağıdaki belgede yer alan soruları mühendislik defterinize yanıtlayarak meydan okumanın kurallarını ve kurulumunu anladığınızdan emin olun.
Anladığınızı Kontrol Edin soruları
Soruları tamamladıktan sonra, soruyu çözmeye çalışın.
Stacked Up Challenge'da yarışmak için Sonraki > seçin.