
Praxis
Im letzten Abschnitt lernten Sie die Elemente eines Roboterarms kennen und wie verschiedene Armmechanismen funktionieren. Jetzt werden Sie das Gelernte anwenden, um den Build zu iterieren, um die Übungsaktivität "Verbessere deinen Arm" abzuschließen.
Bei dieser Aktivität muss Ihr Roboter zu einem Buckyball fahren, den Buckyball aufnehmen, heben und dann auf einen Ring legen. Sie werden das Design des Arms wiederholen, um die Fähigkeit Ihres Roboters zu verbessern, den Buckyball auf den Ring zu stapeln. Sehen Sie sich das Video unten an, um zu sehen, wie Sie das Gelernte anwenden können, um die Übung „Verbessere deinen Arm“ abzuschließen.
Jetzt bist du an der Reihe, die Übungsaktivität "Verbessere deinen Arm" abzuschließen!
In dieser Animation wird ein Controller verwendet, um den Roboter zum Buckyball zu fahren, ihn aufzunehmen, dann den Buckyball anzuheben und ihn auf den Ring zu legen. Diese Animation zeigt eine mögliche Art und Weise, wie sich Ihr Roboter bewegen könnte, um die Übungsaktivität „Verbessere deinen Arm“ abzuschließen.
Verwenden Sie dieses Dokument als Referenz, um die Übungsaktivität abzuschließen.
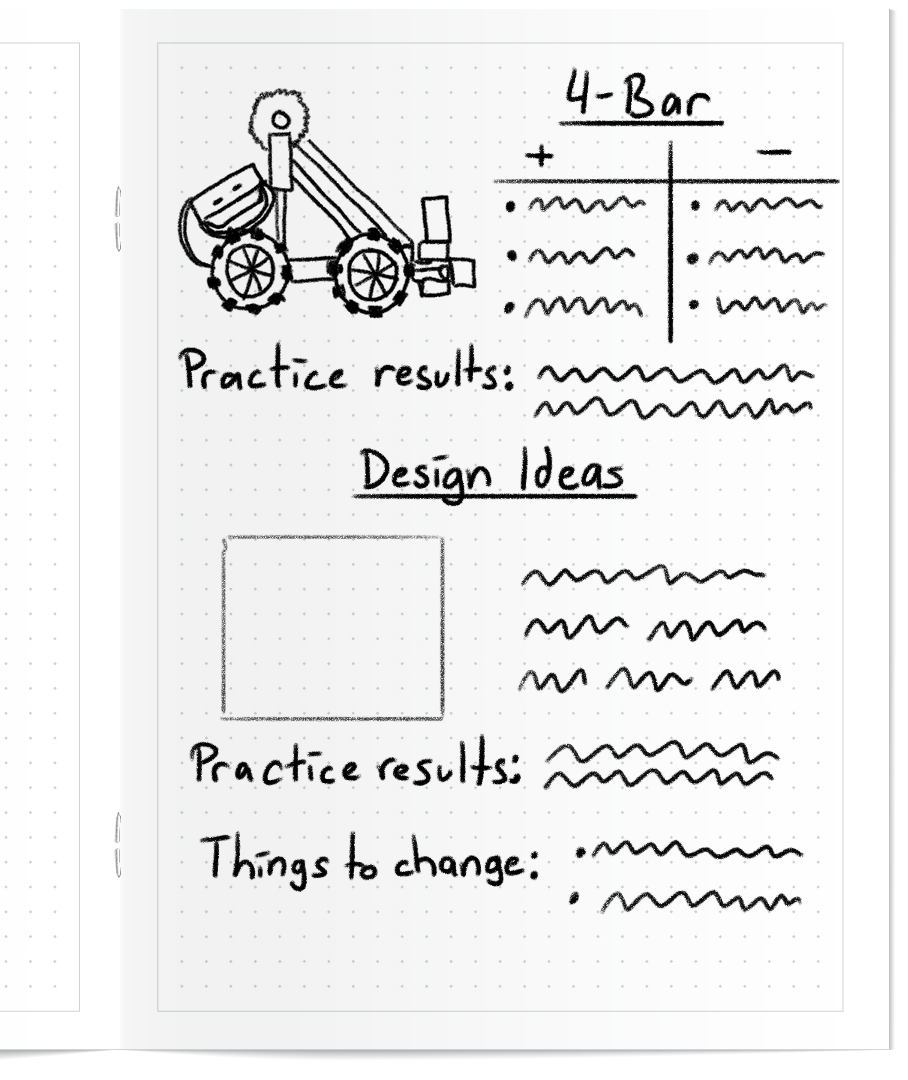
Wenn Sie die Übung „Verbessern Sie Ihren Arm“ abschließen, dokumentieren Sie Folgendes in Ihrem technischen Notizbuch:
- Beschreiben und veranschaulichen Sie Ihr Roboterdesign.
- Wie arbeiten Ihr Klauen- und Armdesign zusammen, um die Aktivität abzuschließen?
- Wie können Sie dieses Design wiederholen, um die Leistung des Roboters zu verbessern?
Sehen Sie sich das Bild auf der linken Seite an, um ein Beispiel dafür zu erhalten, wie Sie Ihre Designideen und Tests aufzeichnen können.
Arm-Designs
Im Abschnitt Lernen haben Sie verschiedene Arten von Armdesigns kennengelernt und diese Animationen wurden Ihnen während des Videos gezeigt. Verwenden Sie diese Armanimationen unten, um auf das Design Ihres Arms zu verweisen, während Sie es wiederholen.
Schwenkarm
Ein Schwingarm ist einer der am einfachsten zu montierenden Arme. Das Ende des Arms folgt einem Bogen, während sich das Zahnrad dreht, und könnte über die Oberseite laufen und die andere Seite des Roboters erreichen, wie in dieser Animation gezeigt.
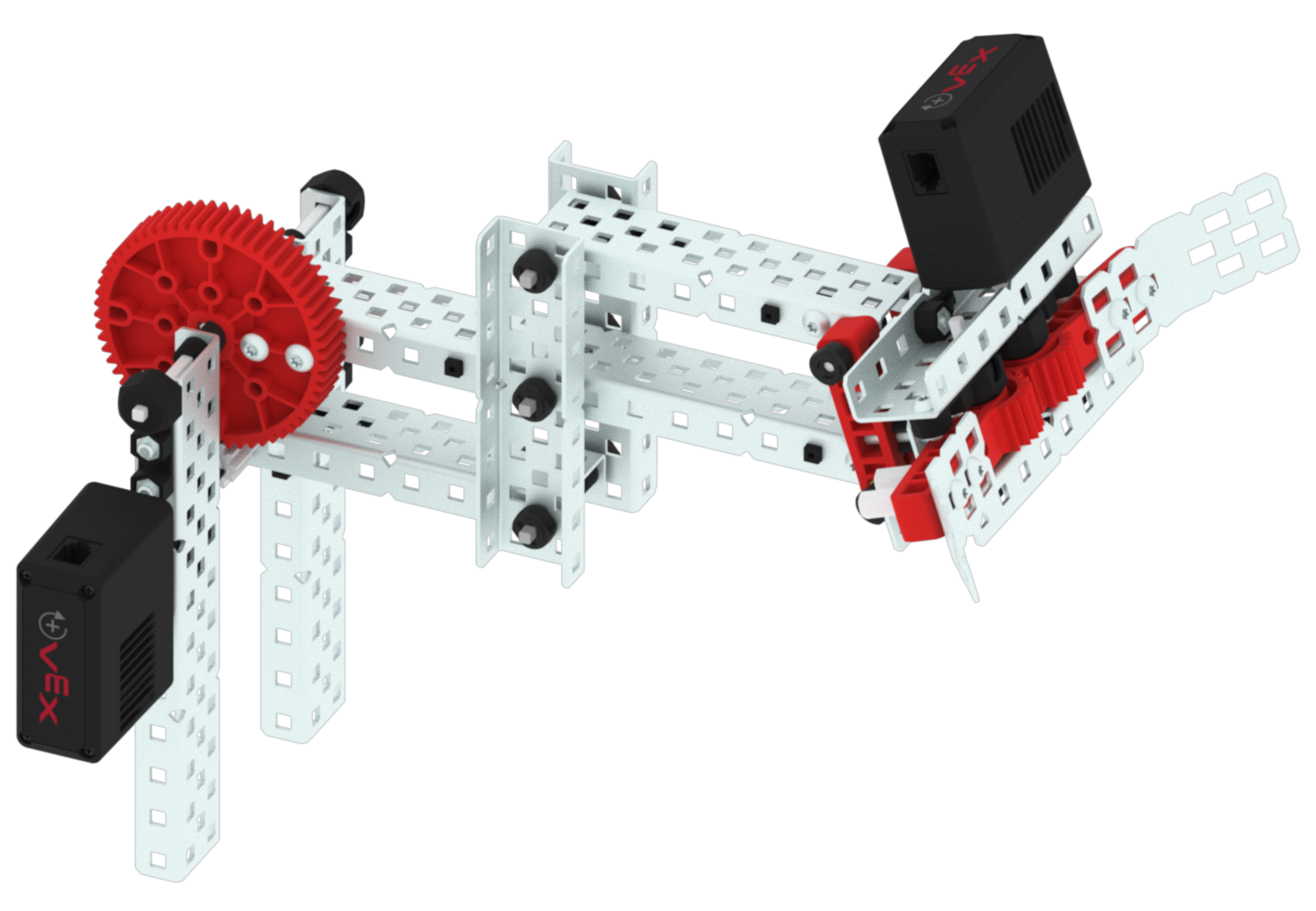
4-Stangen-Arm
Dieser Arm besteht aus parallelen Gestängen, die es ermöglichen, dass das angehobene Objekt waagerecht bleibt, wie in der Animation gezeigt. Dies ist das Armdesign, das in den Clawbot-Bauanweisungen verwendet wird.
6-Stangen-Arm
Dieser Arm ist eine Verlängerung des 4-Bar-Arms, wie in dieser Animation gezeigt. Obwohl es höher als die 4-Bar sein kann, ist dies aufgrund der Anzahl der Teile und Drehpunkte ein schwierig zu bauender Arm.
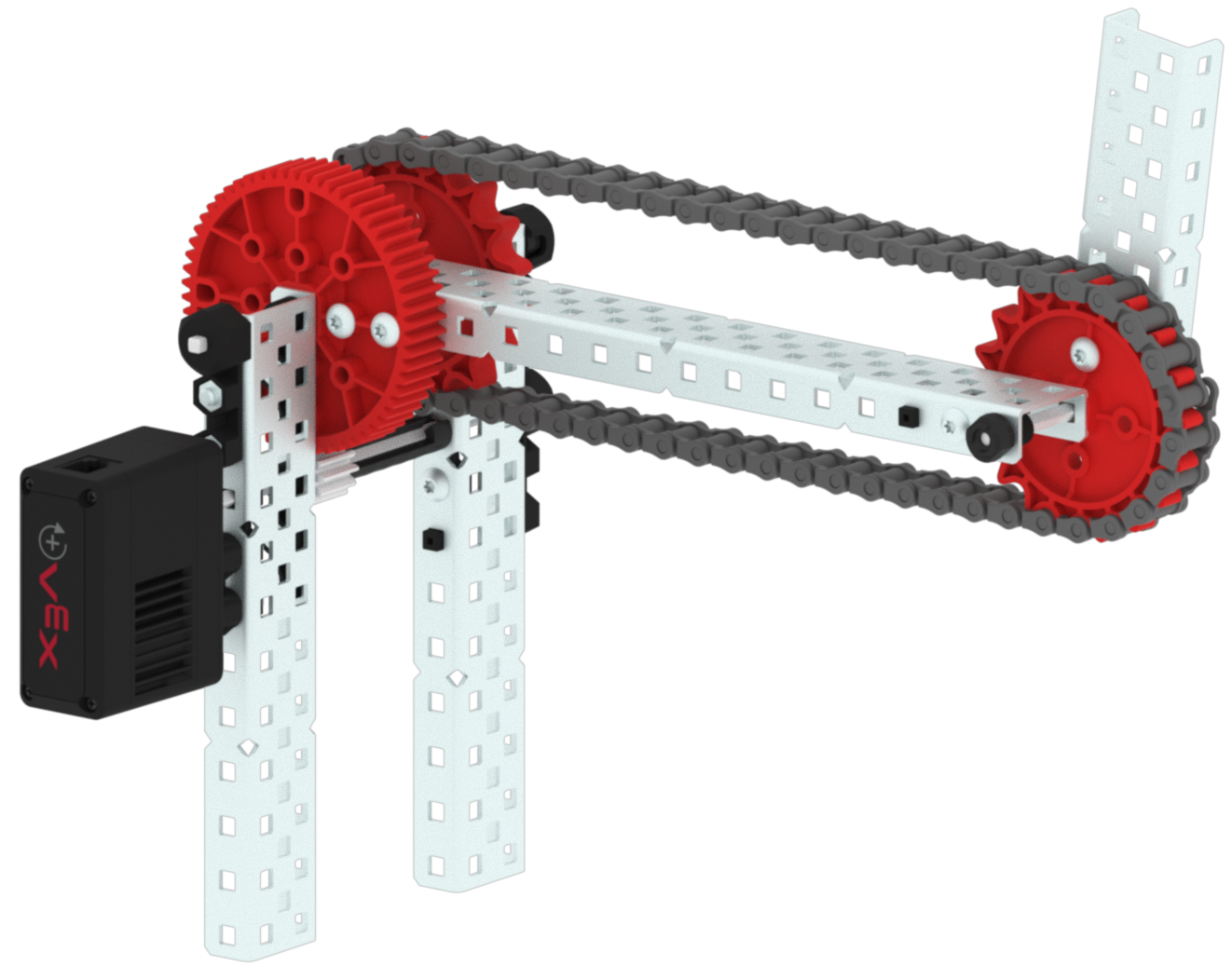
Kettenstangenarm
Dieser Arm besteht aus Kettenrädern und Kette, um einen Gelenkarm zu bilden, wie in dieser Animation gezeigt. Dies wird am häufigsten bei passiven Manipulatoren wie einer Schaufel verwendet.
Bereiten Sie sich auf die Herausforderung vor
In Compete (auf der nächsten Seite) testet ihr eure Armdesigns in der Stacked Up Challenge. Lerne, wie du an der Herausforderung teilnimmst, überprüfe dein Verständnis und übe dann für die Herausforderung.
Das Ziel dieser Herausforderung ist es, den Controller zu verwenden, um Ihren Roboter zu steuern und so viele Buckyballs wie möglich innerhalb einer Minute auf Ringe zu stapeln.
Sehen Sie sich diese Animation an, um ein Beispiel für einen Clawbot zu sehen, der Buckyballs in der Stacked Up Challenge auf Ringe stapelt.
Befolgen Sie die Schritte in diesem Dokument, um mehr darüber zu erfahren, wie Sie diese Herausforderung meistern können.
Überprüfe dein Verständnis
Bevor Sie mit der Herausforderung beginnen, stellen Sie sicher, dass Sie die Regeln und den Aufbau der Herausforderung verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zu deinem Verständnis prüfen
Versuchen Sie nach Abschluss der Fragen, die Herausforderung zu üben.
Wähle Weiter aus > , um an der Stacked-Up-Herausforderung teilzunehmen.