
Prática
Na última seção, você aprendeu sobre os elementos de um braço robótico e como diferentes mecanismos de braço funcionam. Agora, você aplicará o que aprendeu para iterar na compilação para concluir a atividade de prática Melhorar o Braço.
Nesta atividade, o seu robô terá de conduzir até uma Buckyball, pegar na Buckyball, levantá-la e, em seguida, colocá-la num anel. Você repetirá o design do braço para melhorar a capacidade do seu robô de empilhar a Buckyball no anel. Assista ao vídeo abaixo para ver como você pode aplicar o que aprendeu para concluir a atividade prática Melhorar o Seu Braço.
Agora é a sua vez de concluir a atividade de prática Melhorar o Seu Braço!
Nesta animação, um Controlador é usado para conduzir o robô até o Buckyball, pegá-lo, depois levantar o Buckyball e colocá-lo em cima do anel. Esta animação mostra uma maneira possível de o seu robô se mover para concluir a atividade de prática Melhorar o Braço.
Use este documento como referência para concluir a atividade prática.
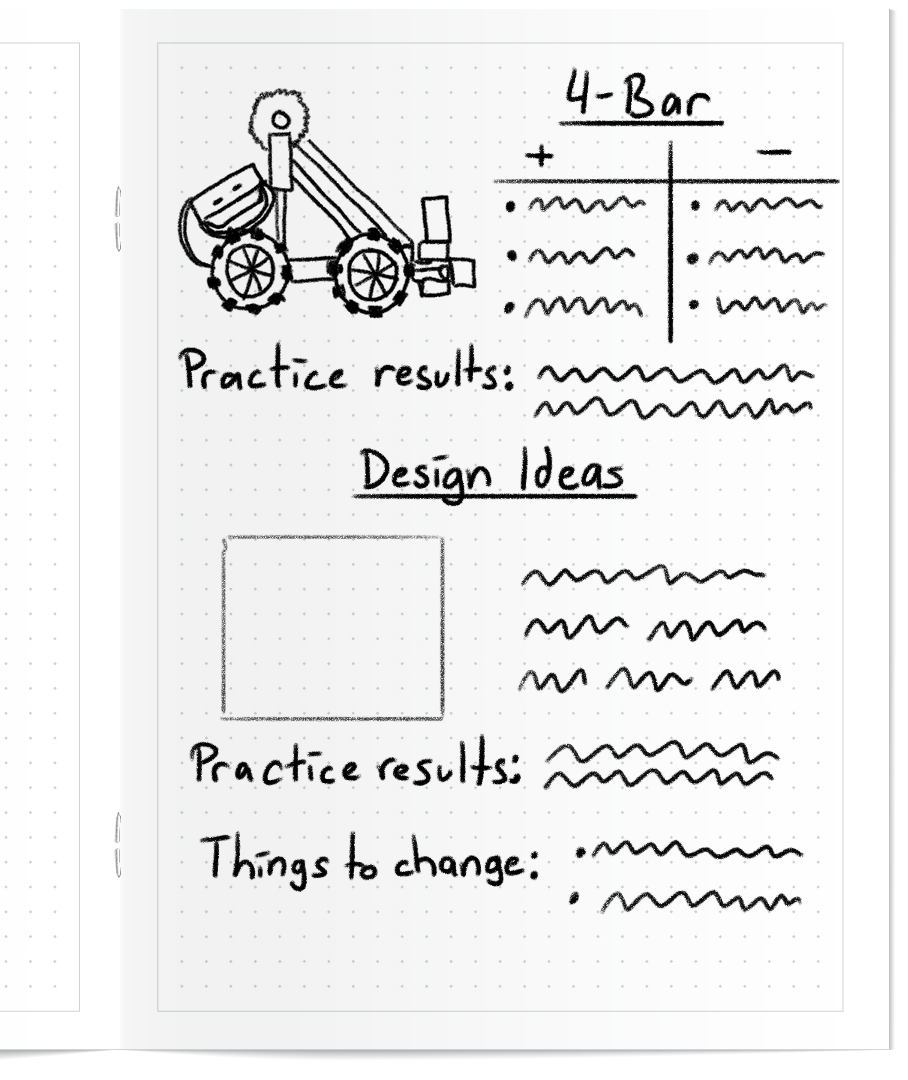
Ao concluir a atividade de prática Melhorar o seu braço, documente o seguinte no seu caderno de engenharia:
- Descreva e ilustre o design do seu robô.
- Como é que o design da sua garra e do seu braço funcionam em conjunto para concluir a atividade?
- Como você pode iterar este design para melhorar o desempenho do robô?
Veja a imagem à esquerda para um exemplo de como você pode gravar as suas ideias de design e testes.
Desenhos de Braços
Na seção Aprender, você aprendeu sobre diferentes tipos de designs de braço e viu essas animações durante o vídeo. Use estas animações de braço abaixo para fazer referência enquanto itera no design do seu braço.
Braço oscilante
Um braço oscilante é um dos braços mais fáceis de montar. A extremidade do braço segue um arco à medida que a engrenagem gira e pode passar por cima e alcançar o outro lado do robô, como mostrado nesta animação.
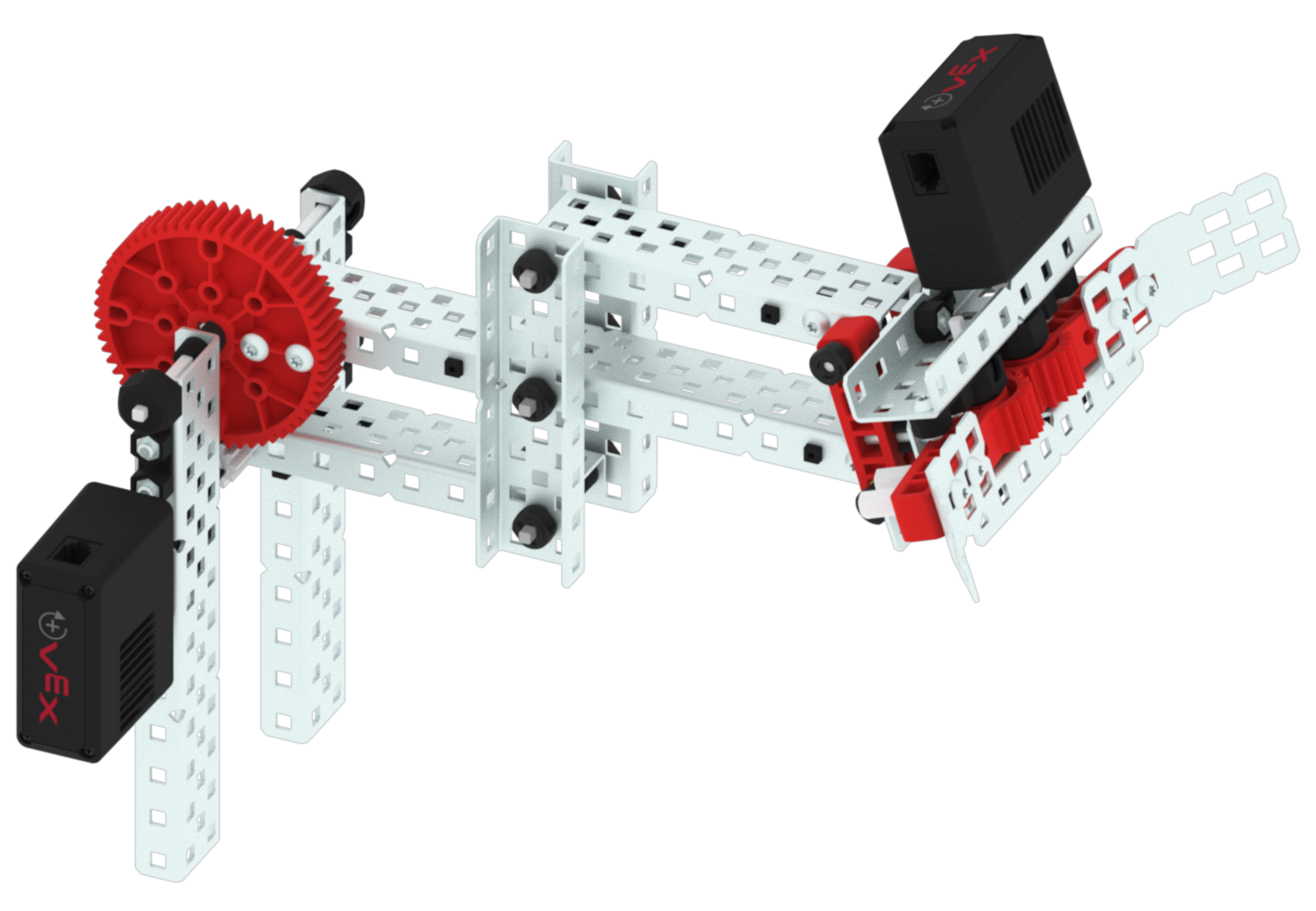
Braço de 4 barras
Este braço é composto por ligações paralelas que permitem que o objeto que está sendo levantado permaneça nivelado, como mostrado na animação. Este é o design do braço usado nas instruções de construção do Clawbot.
Braço de 6 barras
Este braço é uma extensão do braço de 4 barras, como mostrado nesta animação. Embora possa atingir mais do que a barra de 4, este é um braço difícil de construir devido ao número de peças e pontos de articulação.
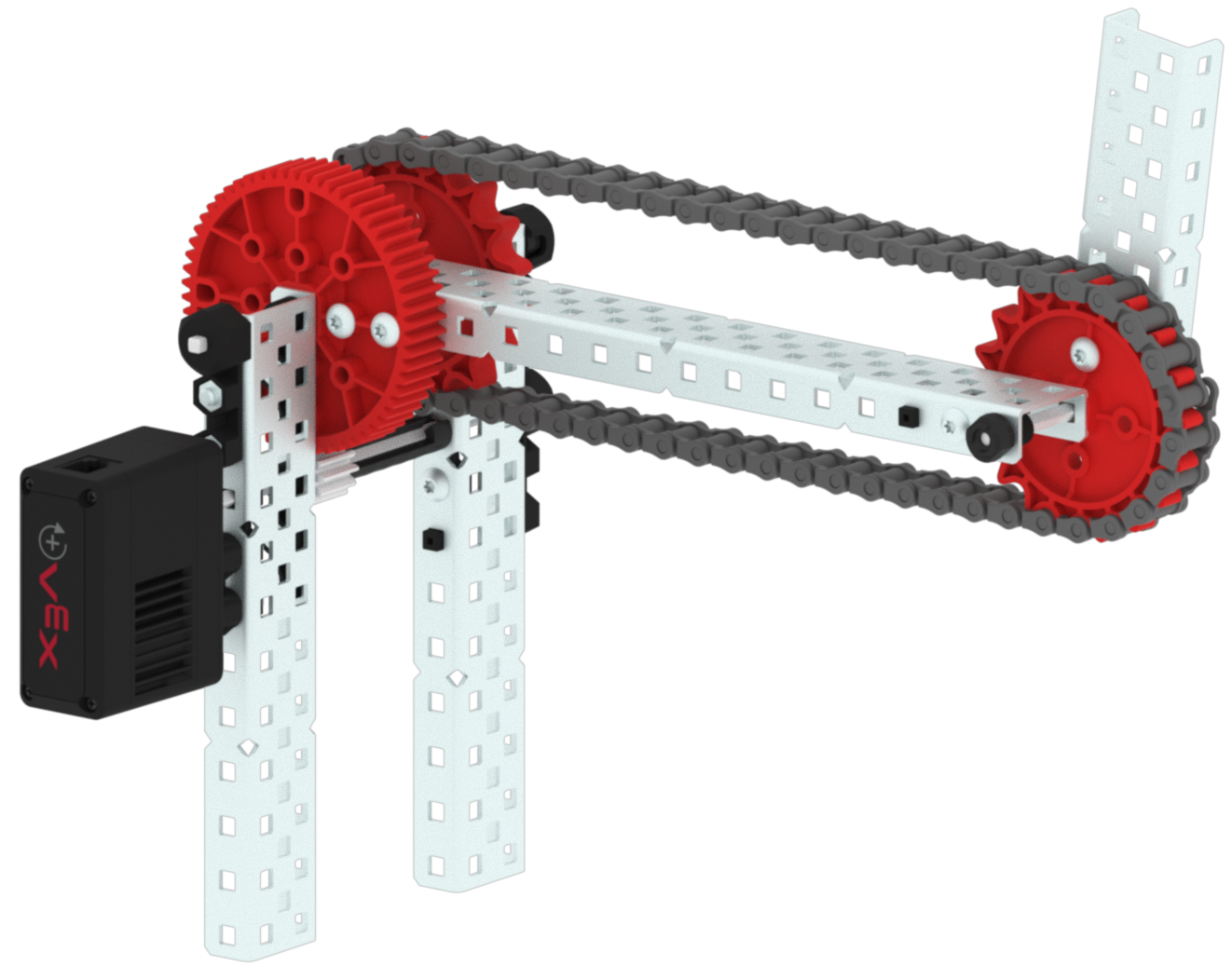
Braço da barra de corrente
Este braço é composto de rodas dentadas e corrente para criar um braço de ligação, como mostrado nesta animação. Isso é mais tradicionalmente usado com manipuladores passivos, como uma colher.
Prepare-se para o desafio
Em Competir (na próxima página), você testará os designs dos seus braços no Stacked Up Challenge. Aprenda a competir no desafio, verifique sua compreensão e, em seguida, pratique o desafio.
O objetivo deste desafio é usar o Controlador para conduzir seu robô e empilhar o máximo de Buckyballs em anéis que você puder dentro de um minuto.
Assista a esta animação para ver um exemplo de um Clawbot empilhando Buckyballs em anéis no Stacked Up Challenge.
Siga as etapas deste documento para saber mais sobre como concluir este desafio.
Verifique a sua compreensão
Antes de iniciar o desafio, certifique-se de entender as regras e a configuração do desafio respondendo às perguntas do documento abaixo em seu caderno de engenharia.
Verifique as suas perguntas de compreensão
Depois de concluir as perguntas, tente praticar o desafio.
Selecione Seguinte > para competir no Stacked Up Challenge.