
관행
지난 섹션에서는 로봇 팔의 구성 요소와 다양한 팔 메커니즘이 작동하는 방식에 대해 알아보았습니다. 이제 빌드를 반복하여 학습한 내용을 적용하여 팔 연습 활동을 완료합니다.
이 활동에서 로봇은 버키볼로 달려가서 버키볼을 집어 들고, 들어 올린 후 링에 올려놓아야 합니다. 로봇이 버키볼을 링에 쌓는 능력을 향상시키기 위해 팔의 디자인을 반복합니다. 아래 영상을 시청하여 배운 내용을 적용하여 팔 운동 연습 활동을 완료하는 방법을 알아보세요.
이제 팔 운동 연습 활동을 완료할 차례입니다!
이 애니메이션에서는 컨트롤러를 사용해 로봇을 버키볼까지 몰고 가서 버키볼을 집어 올린 다음, 버키볼을 들어 올려 링 위에 올려놓습니다. 이 애니메이션은 로봇이 Improve Your Arm 연습 활동을 완료하기 위해 움직일 수 있는 한 가지 가능한 방법을 보여줍니다.
이 문서를 참고하여 연습 활동을 완료하세요.
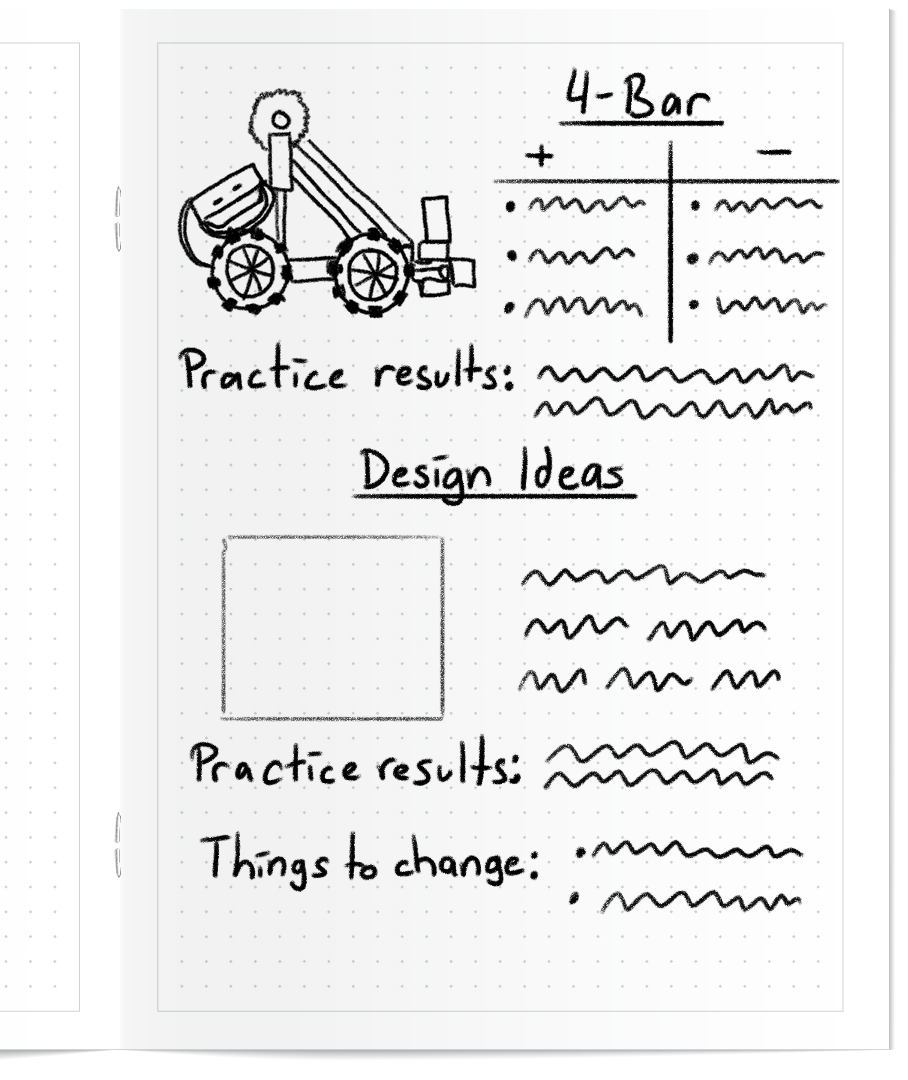
팔 운동 연습 활동을 완료하면 엔지니어링 노트에 다음 내용을 기록하세요.
- 로봇 디자인을 설명하고 그림으로 표현해 보세요.
- 발톱과 팔 디자인이 어떻게 함께 작용하여 활동을 완료할 수 있나요?
- 이 디자인을 반복해서 로봇의 성능을 개선하려면 어떻게 해야 할까요?
디자인 아이디어와 테스트를 기록하는 방법에 대한 예는 왼쪽 이미지를 참조하세요.
팔 디자인
학습 섹션에서는 다양한 유형의 팔 디자인에 대해 알아보았고, 영상에서는 이러한 애니메이션이 보여졌습니다. 팔 디자인을 반복하는 동안 아래의 팔 애니메이션을 참고하세요.
스윙 암
스윙암은 조립하기 가장 쉬운 암 중 하나입니다. 이 애니메이션에서 보여지는 것처럼, 기어가 회전하면서 팔의 끝부분이 호를 그리며 움직이고 로봇의 위쪽을 지나 반대쪽에 도달할 수도 있습니다.
4-바 암
이 팔은 애니메이션에서 볼 수 있듯이 들어 올리는 물체가 수평을 유지할 수 있도록 하는 평행 연결 장치로 구성되어 있습니다. 이것은 클로봇 제작 설명서에 사용된 팔 디자인입니다.
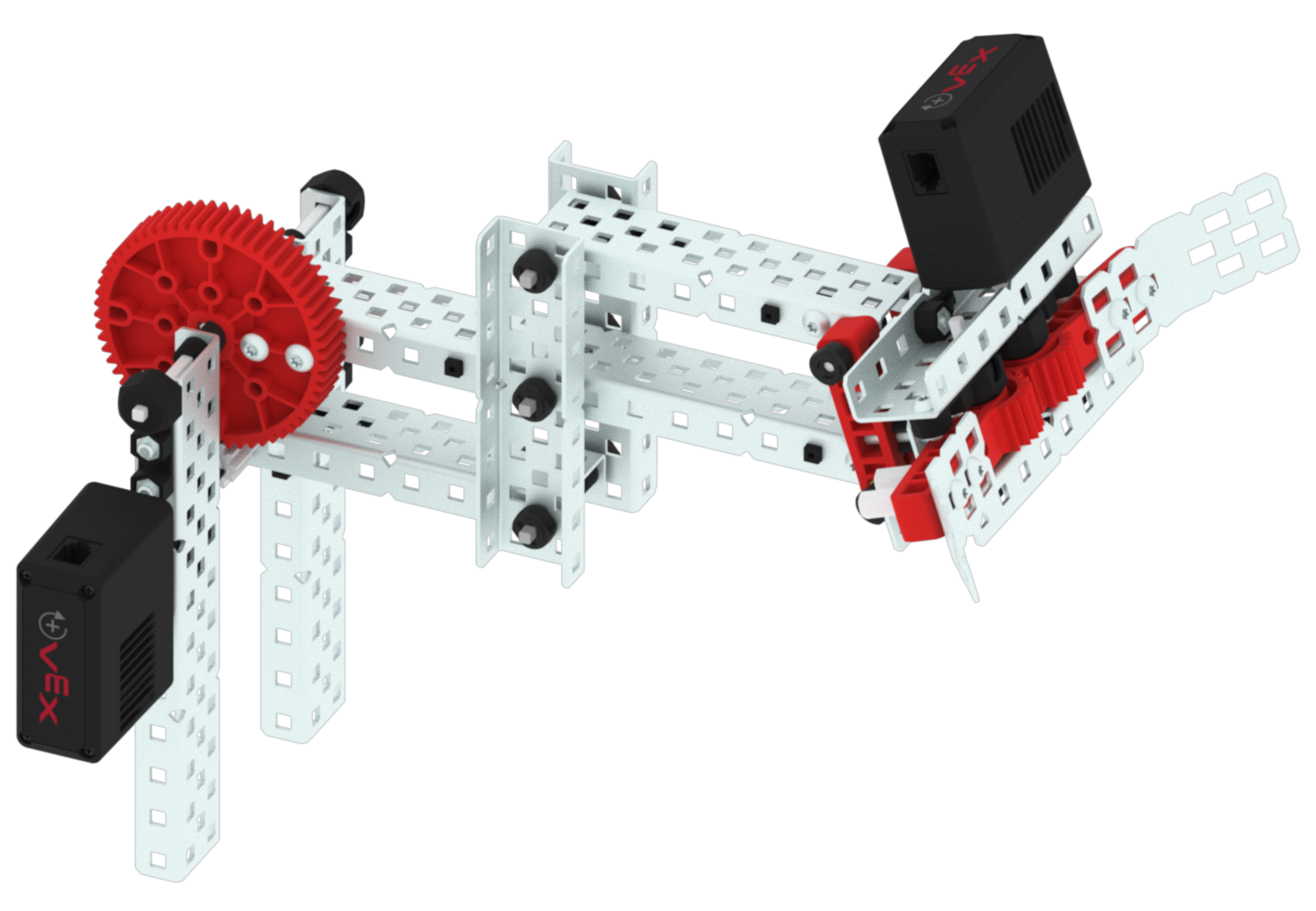
6바 암
이 팔은 이 이미지에서 볼 수 있듯이 4개의 막대로 구성된 팔의 확장된 부분입니다. 4개의 막대보다 더 높이까지 닿을 수 있지만, 부품과 피벗 포인트의 수가 많아 만들기 어려운 팔입니다.
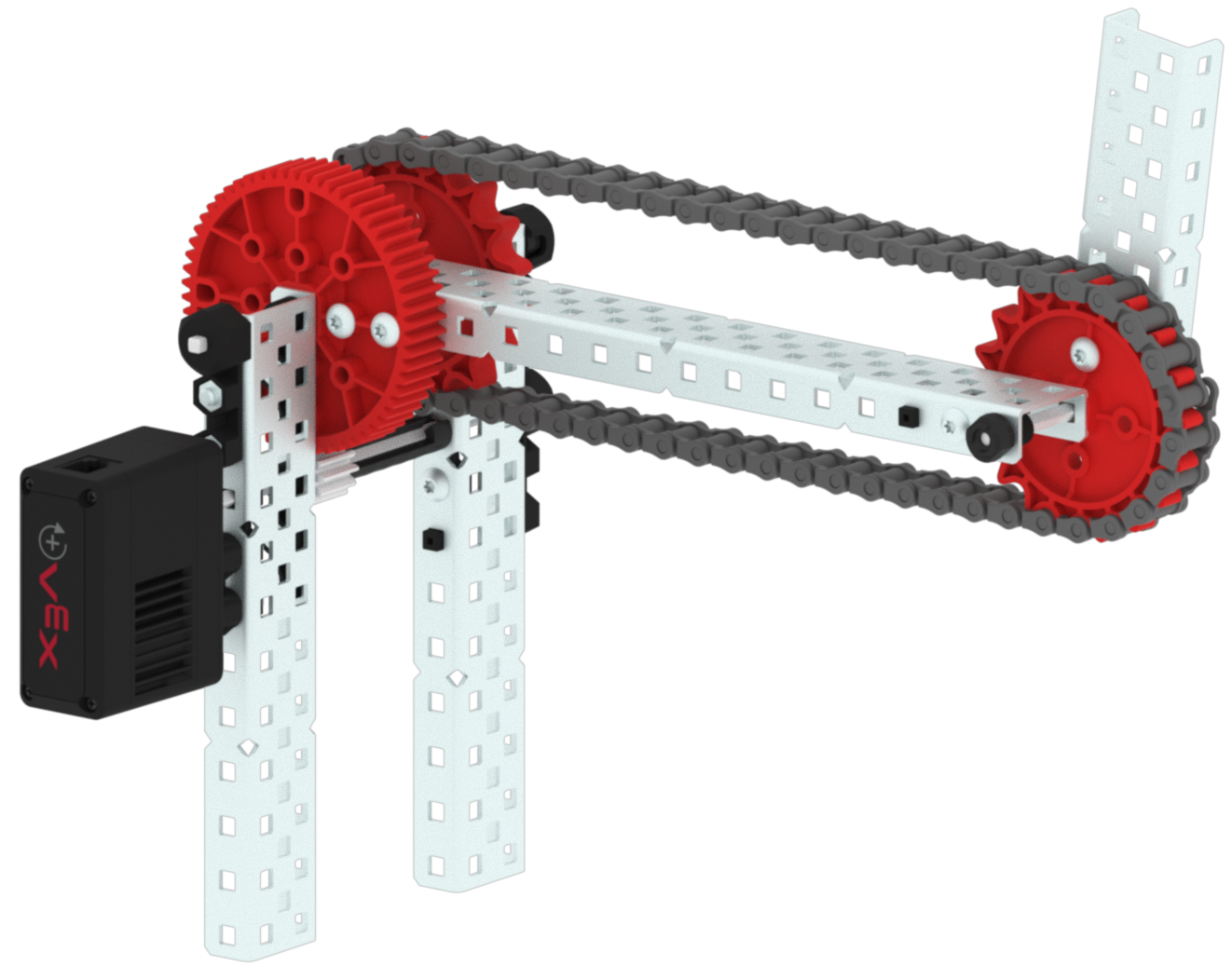
체인바 암
이 팔은 이 이미지에서 볼 수 있듯이 연결 팔을 만들기 위해 스프로킷과 체인으로 구성되어 있습니다. 이것은 전통적으로 스쿱과 같은 수동적 조작자와 함께 사용됩니다.
도전에 대비하세요
경쟁(다음 페이지)에서는 Stacked Up Challenge에서 팔 디자인을 테스트합니다. 도전 과제에 참여하는 방법을 배우고, 이해도를 확인한 다음, 도전 과제를 위해 연습하세요.