
Luyện tập
Ở phần trước, bạn đã tìm hiểu về các thành phần của cánh tay robot và cách thức hoạt động của các cơ chế cánh tay khác nhau. Bây giờ, bạn sẽ áp dụng những gì đã học để lặp lại quá trình xây dựng nhằm hoàn thành hoạt động luyện tập Cải thiện cánh tay.
Trong hoạt động này, robot của bạn sẽ phải lái đến một quả Buckyball, nhặt Buckyball, nâng nó lên và sau đó đặt nó lên một chiếc nhẫn. Bạn sẽ lặp lại thiết kế của cánh tay để cải thiện khả năng xếp Buckyball lên vòngcủa rô-bốt. Xem video bên dưới để biết cách bạn có thể áp dụng những gì đã học để hoàn thành hoạt động luyện tập Cải thiện cánh tay.
Bây giờ đến lượt bạn hoàn thành hoạt động luyện tập Cải thiện cánh tay!
Trong hình ảnh động này, Bộ điều khiển được sử dụng để điều khiển robot đến Buckyball, nhặt nó lên, sau đó nâng Buckyball lên và đặt nó lên trên vòng tròn. Hình ảnh động này cho thấy một cách có thể để robot của bạn di chuyển để hoàn thành hoạt động thực hành Cải thiện cánh tay.
Sử dụng tài liệu này làm tài liệu tham khảo để hoàn thành bài thực hành.
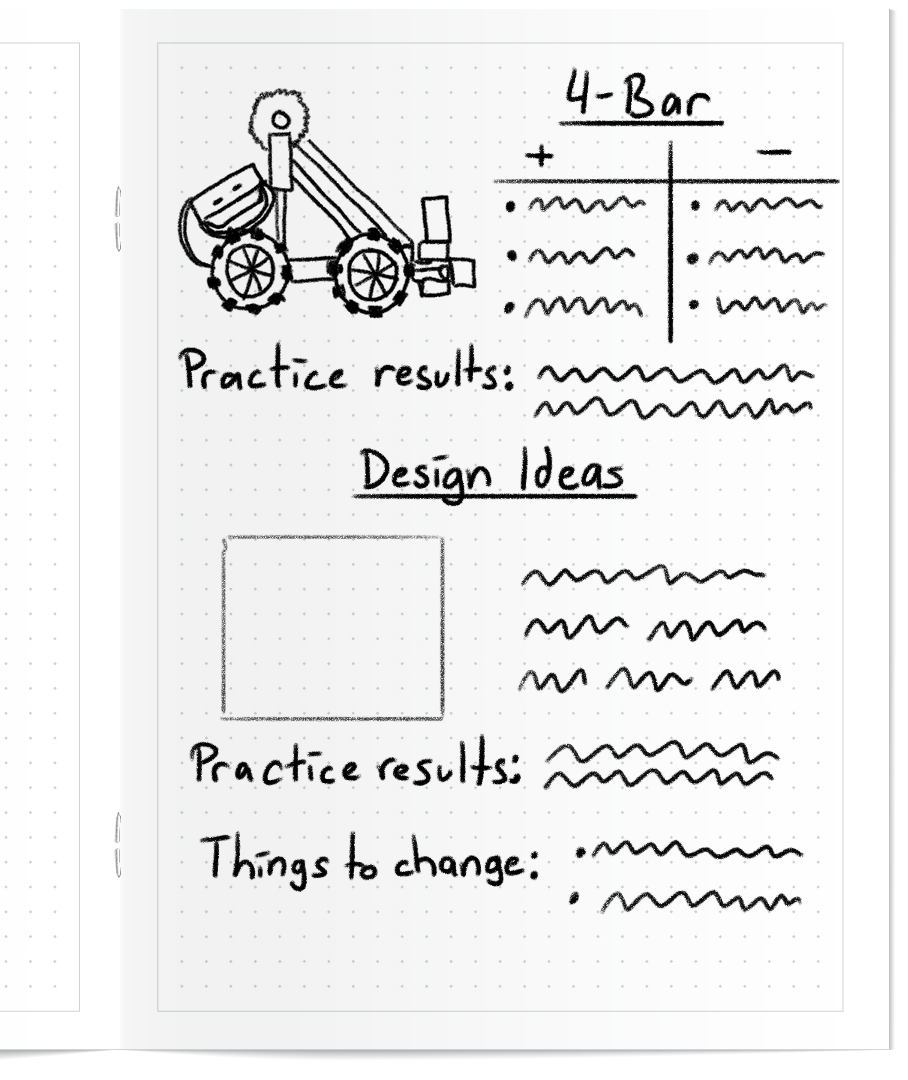
Khi bạn hoàn thành hoạt động thực hành Cải thiện cánh tay, hãy ghi lại những điều sau vào sổ tay kỹ thuật của bạn:
- Hãy mô tả và minh họa thiết kế robot của bạn.
- Thiết kế móng vuốt và cánh tay của bạn phối hợp với nhau như thế nào để hoàn thành hoạt động?
- Bạn có thể lặp lại thiết kế này như thế nào để cải thiện hiệu suất của robot?
Xem hình ảnh bên trái để biết ví dụ về cách bạn có thể ghi lại ý tưởng thiết kế và thử nghiệm của mình.
Thiết kế cánh tay
Trong phần Học, bạn đã tìm hiểu về các loại thiết kế cánh tay khác nhau và được xem những hình ảnh động này trong video. Sử dụng các hình ảnh động cánh tay bên dưới để tham khảo khi lặp lại thiết kế cánh tay của bạn.
Cánh tay xoay
Cánh tay xoay là một trong những cánh tay dễ lắp ráp nhất. Đầu cánh tay di chuyển theo hình cung khi bánh răng quay và có thể vượt qua đỉnh và chạm tới phía bên kia của rô-bốt như trong hình ảnh động này.
Tay đòn 4 thanh
Cánh tay này được tạo thành từ các liên kết song song cho phép vật thể được nâng lên vẫn giữ được vị trí cân bằng, như trong hình ảnh động. Đây là thiết kế cánh tay được sử dụng trong hướng dẫn chế tạo Clawbot.
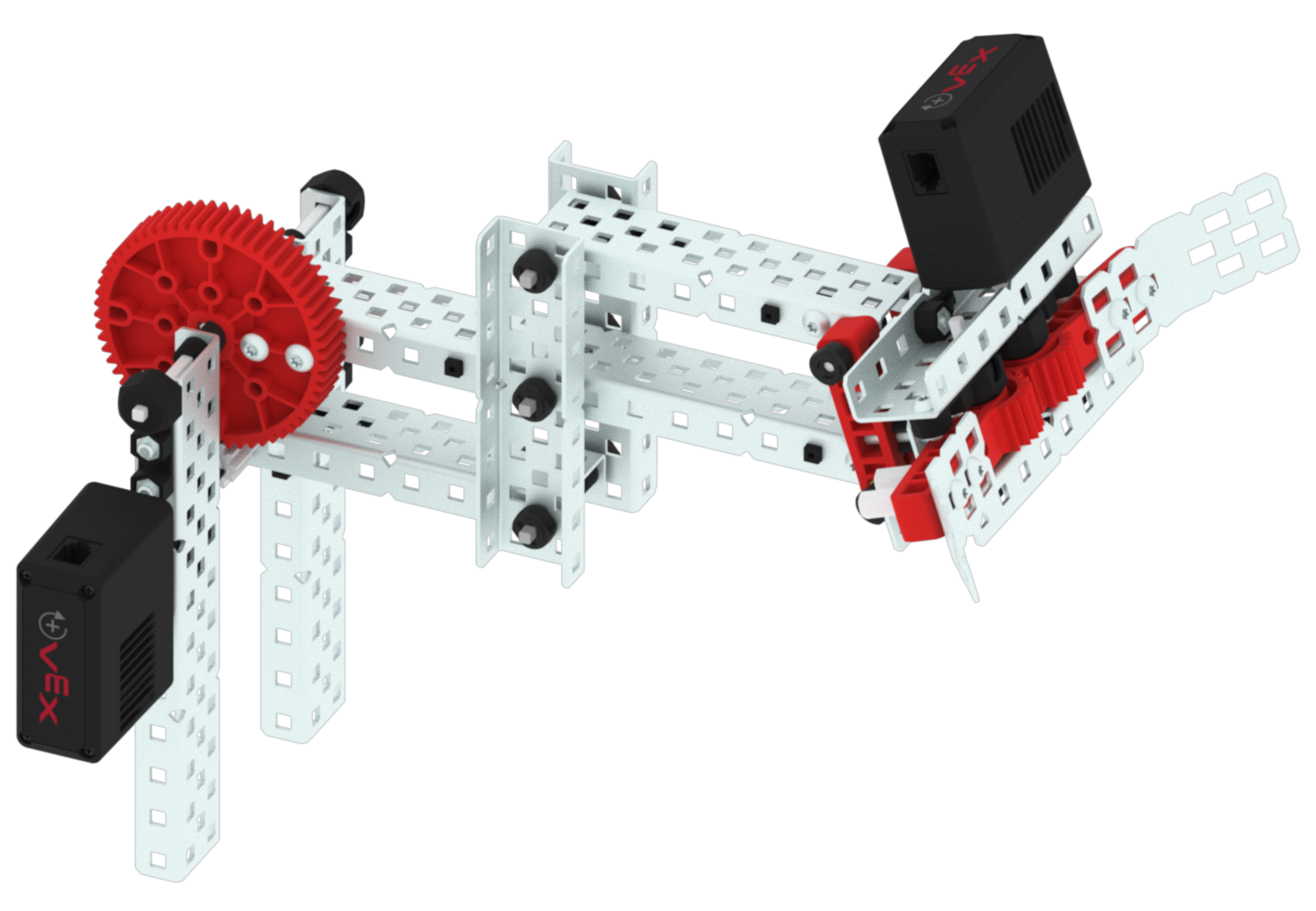
Tay đòn 6 thanh
Cánh tay này là phần mở rộng của cánh tay 4 thanh, như thể hiện trong hình ảnh này. Mặc dù có thể vươn cao hơn 4 thanh, nhưng đây là loại cánh tay khó chế tạo do có nhiều bộ phận và điểm xoay.
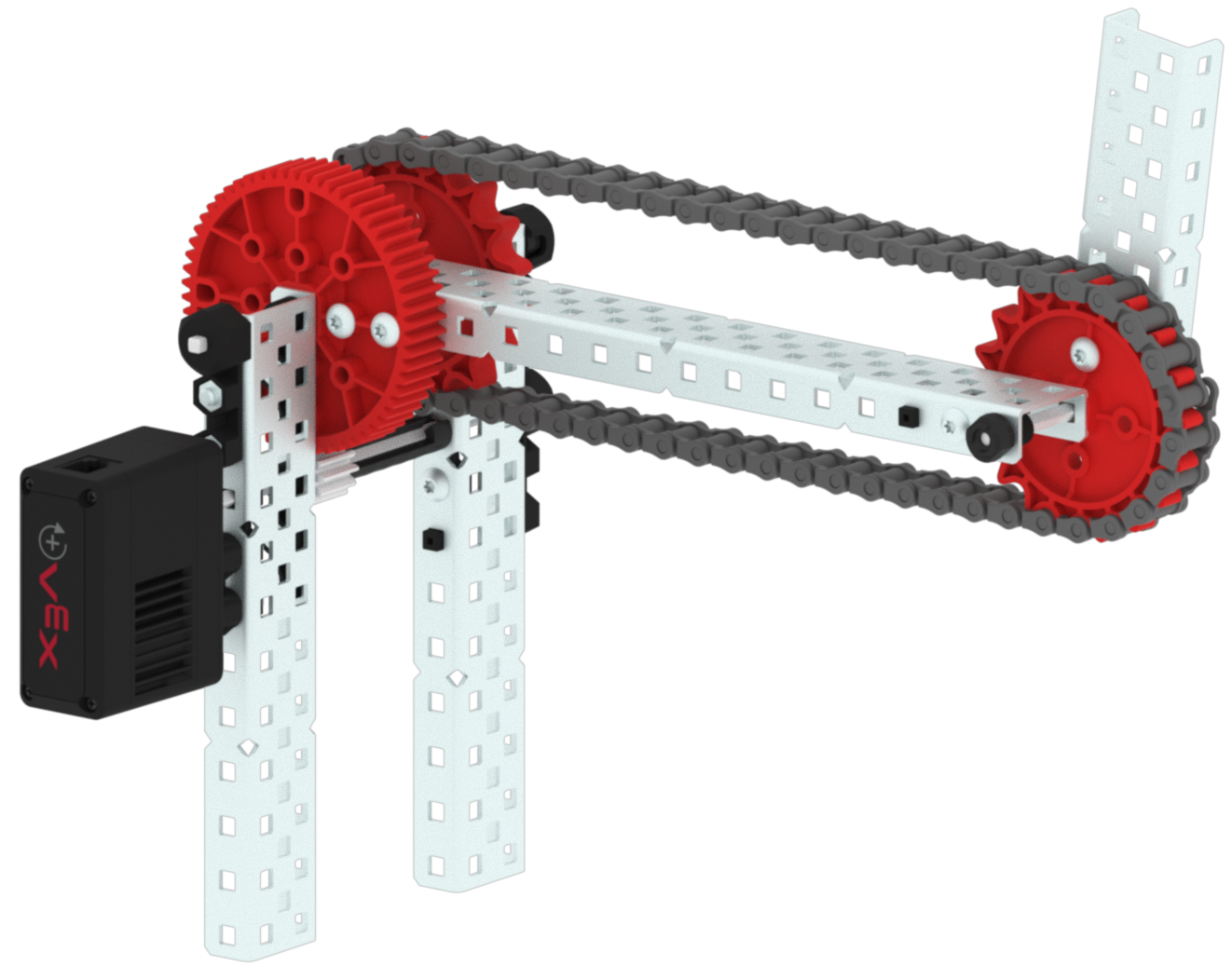
Tay đòn xích-thanh
Cánh tay này được tạo thành từ các bánh răng và xích để tạo thành cánh tay liên kết, như thể hiện trong hình ảnh này. Cách này thường được sử dụng với các dụng cụ thao tác thụ động như muỗng.
Chuẩn bị cho thử thách
Trong Compete (ở trang tiếp theo), bạn sẽ kiểm tra thiết kế cánh tay của mình trong Thử thách xếp chồng. Tìm hiểu cách tham gia thử thách, kiểm tra sự hiểu biết của bạn, sau đó luyện tập cho thử thách.
Mục tiêu của thử thách này là sử dụng Bộ điều khiển để điều khiển robot của bạn và xếp càng nhiều Buckyball vào vòng càng tốt trong vòng một phút.
Xem hình ảnh động này để thấy ví dụ về Clawbot xếp các Buckyball lên các vòng trong Thử thách xếp chồng.
Làm theo các bước trong tài liệu này để tìm hiểu thêm về cách hoàn thành thử thách này.
Kiểm tra sự hiểu biết của bạn
Trước khi bắt đầu thử thách, hãy đảm bảo rằng bạn hiểu rõ các quy tắc và cách thiết lập thử thách bằng cách trả lời các câu hỏi trong tài liệu bên dưới trong sổ tay kỹ thuật của bạn.
Kiểm tra câu hỏi Hiểu biết của bạn
Sau khi hoàn thành các câu hỏi, hãy thử thực hành thử thách.
Chọn Tiếp theo > để tham gia Thử thách xếp chồng.