
Oefening
In het vorige gedeelte hebt u geleerd over de onderdelen van een robotarm en hoe verschillende armmechanismen werken. Nu gaat u toepassen wat u hebt geleerd en dit herhalen op de build om de oefenactiviteit 'Verbeter uw arm' te voltooien.
Bij deze activiteit moet je robot naar een Buckyball rijden, de Buckyball oppakken, optillen en vervolgens op een ring plaatsen. Je gaat iteraties uitvoeren op het ontwerp van de arm om de mogelijkheid van je robot om de Buckyball op de ring te stapelen te verbeteren. Bekijk de onderstaande video om te zien hoe u kunt toepassen wat u hebt geleerd om de oefening Verbeter uw arm te voltooien.
Nu is het jouw beurt om de oefening 'Verbeter je arm' te voltooien!
In deze animatie wordt een controller gebruikt om de robot naar de Buckyball te rijden, deze op te pakken, de Buckyball op te tillen en bovenop de ring te plaatsen. Deze animatie laat een mogelijke manier zien waarop uw robot kan bewegen om de oefening 'Verbeter uw arm' te voltooien.
Gebruik dit document als referentie om de oefenactiviteit te voltooien.
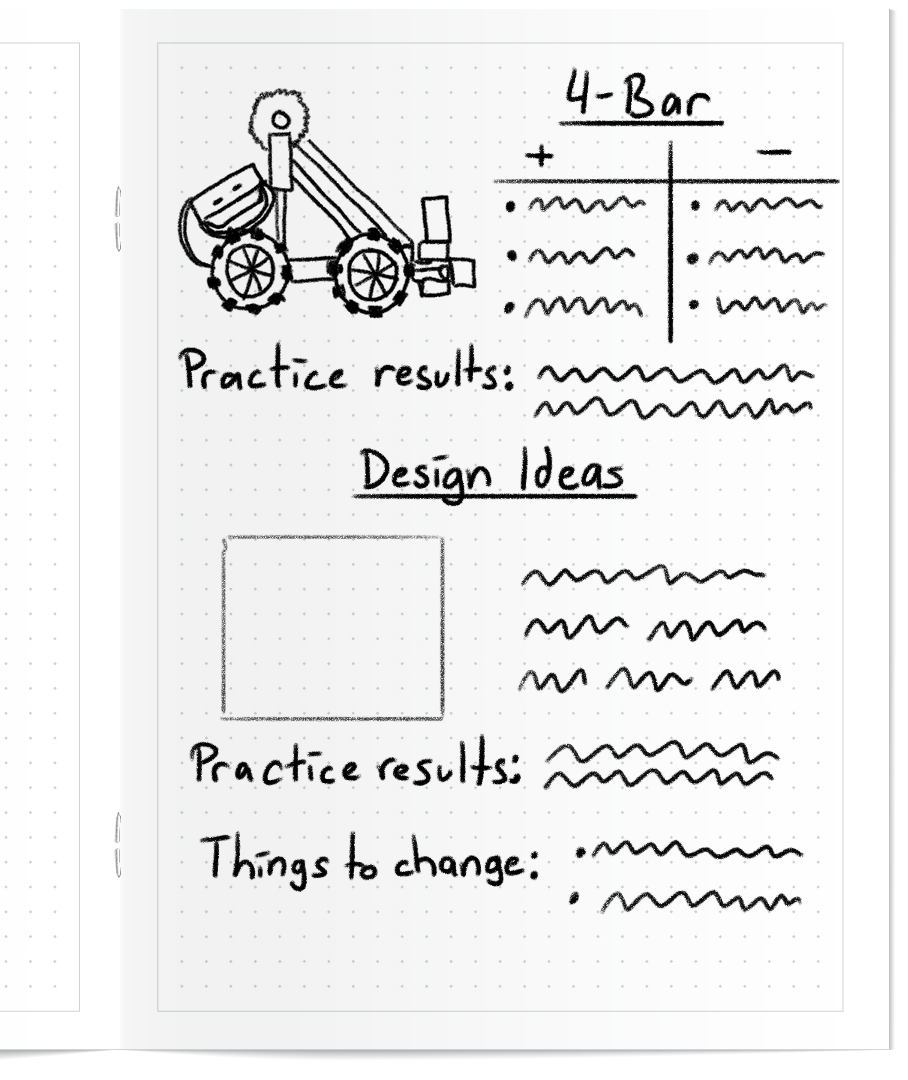
Terwijl u de oefening Verbeter uw arm uitvoert, noteert u het volgende in uw technisch notitieboekje:
- Beschrijf en illustreer uw robotontwerp.
- Hoe werken je klauw- en armontwerp samen om de activiteit te voltooien?
- Hoe kun je dit ontwerp doorvoeren om de prestaties van de robot te verbeteren?
Zie de afbeelding links voor een voorbeeld van hoe u uw ontwerpideeën en tests kunt vastleggen.
Armontwerpen
In het onderdeel Leren hebt u kennisgemaakt met verschillende soorten armontwerpen. Tijdens de video werden deze animaties getoond. Gebruik de onderstaande armanimaties als referentie tijdens het itereren op het ontwerp van uw arm.
Zwenkarm
Een zwenkarm is een van de makkelijkste armen om te monteren. Het uiteinde van de arm beschrijft een boog terwijl het tandwiel draait en kan over de bovenkant van de robot heen gaan en de andere kant van de robot bereiken, zoals te zien is in deze animatie.
4-stangs arm
Deze arm bestaat uit parallelle verbindingen die ervoor zorgen dat het te tillen object horizontaal blijft, zoals te zien is in de animatie. Dit is het armontwerp dat wordt gebruikt in de bouwinstructies van Clawbot.
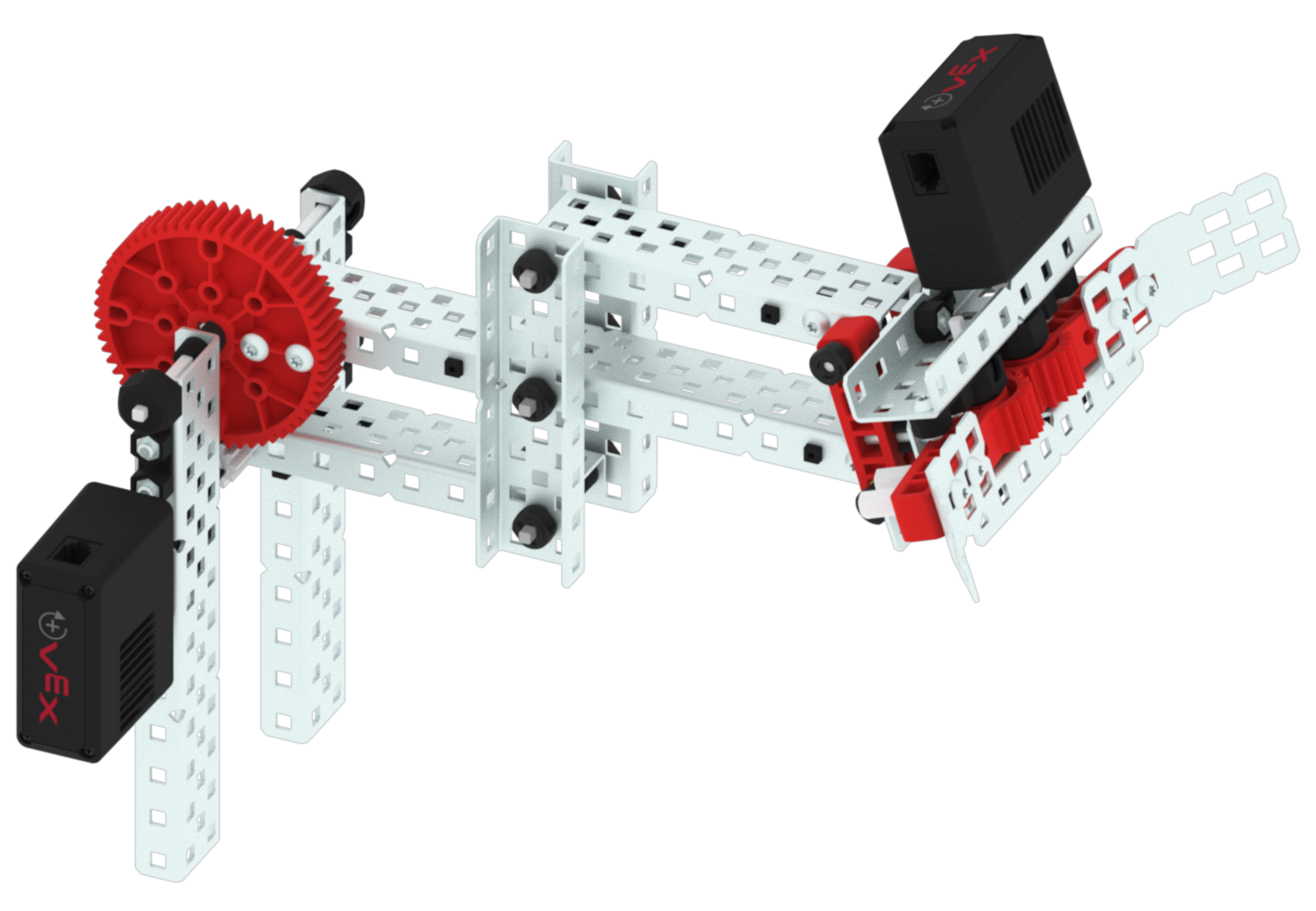
6-stangs arm
Deze arm is een verlengstuk van de 4-stangenarm, zoals weergegeven in deze afbeelding. Hoewel deze arm hoger kan reiken dan de 4-stangs arm, is het lastig om deze te bouwen vanwege het aantal onderdelen en draaipunten.
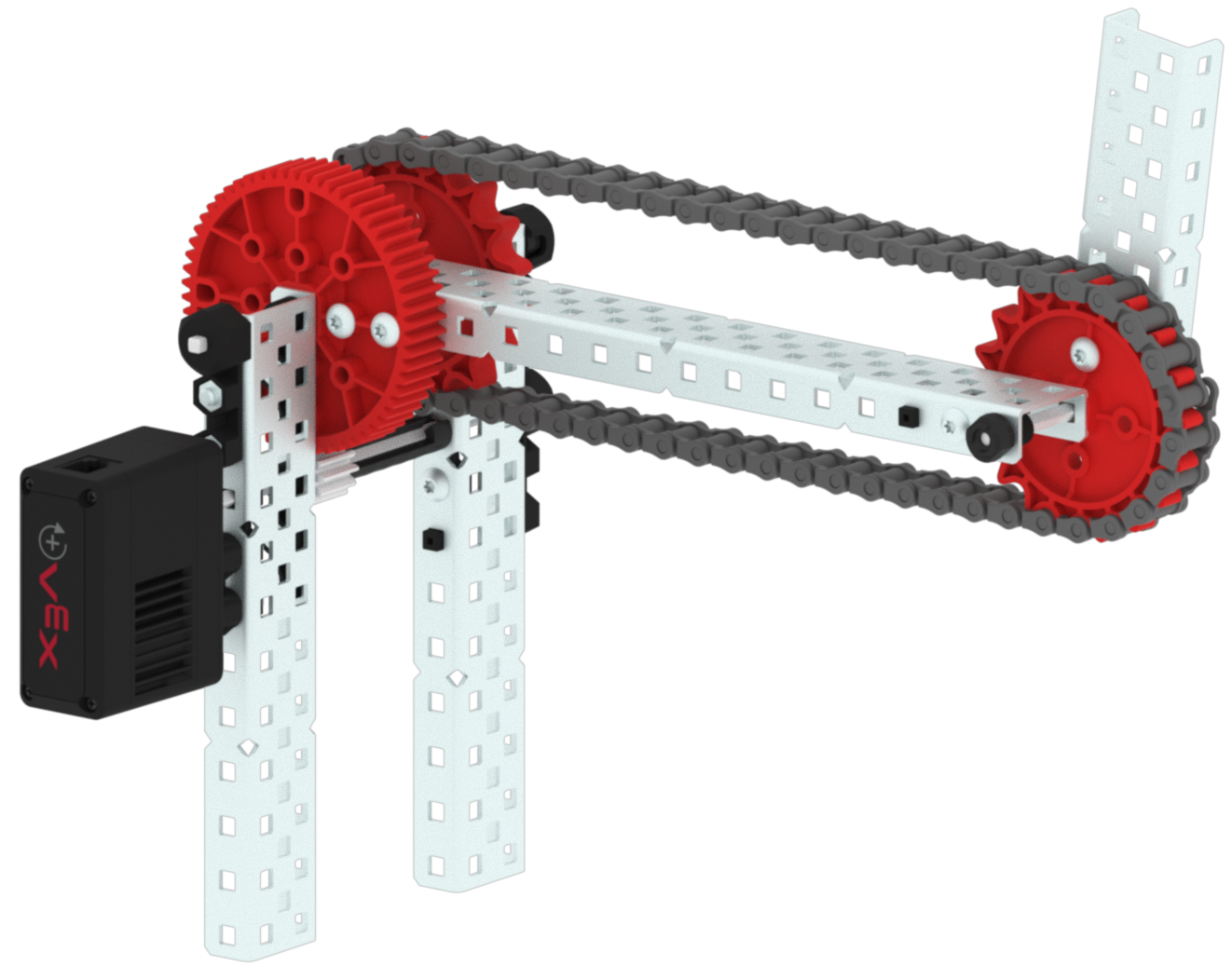
Kettingstangarm
Deze arm bestaat uit tandwielen en een ketting die samen een verbindingsarm vormen, zoals op deze afbeelding te zien is. Dit wordt meestal gebruikt bij passieve manipulators, zoals een scoop.
Bereid je voor op de uitdaging
In Compete (op de volgende pagina) test je je armontwerpen in de Stacked Up Challenge. Leer hoe je aan de uitdaging kunt deelnemen, controleer je begrip en oefen vervolgens voor de uitdaging.
Het doel van deze uitdaging is om de Controller te gebruiken om je robot te besturen en binnen een minuut zoveel mogelijk Buckyballs op ringen te stapelen.
Bekijk deze animatie om een voorbeeld te zien van een Clawbot die Buckyballs op ringen stapelt in de Stacked Up Challenge.
Volg de stappen in dit document om meer te weten te komen over hoe u deze uitdaging kunt voltooien.
Controleer uw begrip
Voordat u aan de uitdaging begint, moet u ervoor zorgen dat u de regels en de opzet van de uitdaging begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen
Nadat u de vragen hebt beantwoord, kunt u de uitdaging oefenen.
Selecteer Volgende > om deel te nemen aan de Stacked Up Challenge.