
Chơi
Phần 1 - Từng bước một
- Hướng dẫnHướng dẫn học sinh rằng các em sẽ tạo một dự án trong đó Cánh tay robot sẽ đợi cho đến khi phát hiện ra đĩa (sử dụng Cảm biến mắt), sau đó di chuyển đĩa bằng Nam châm điện. Hãy xem video bên dưới để thấy cánh tay robot có thể di chuyển đĩa thành công bằng cách đầu tiên cảm nhận đĩa và sau đó trượt đĩa sang bên phải bằng nam châm điện.
Tệp video
- Mô hìnhMô hình cách xây dựng một dự án bằng cách sử dụng khối [Chờ cho đến] và Cảm biến mắt. Yêu cầu học sinh theo dõi cùng bạn trên màn hình chiếu hoặc thông qua Trình chiếu Lab 4.
- Trước khi bắt đầu, hãy đảm bảo học sinh đã nối thiết bị của mình với Cánh tay Robot (2 trục) và Cánh tay Robot đã được cấu hình. Nếu cần, hãy mô phỏng các bước trong bài viết này Cấu hình cánh tay robot để hướng dẫn học sinh trong quá trình Cấu hình cánh tay robot của họ.
Lưu ý: Khi bạn lần đầu tiên kết nối Cánh tay Robot với thiết bị của mình, Con quay hồi chuyển được tích hợp trong Bộ não có thể hiệu chỉnh, khiến Cánh tay Robot tự di chuyển trong giây lát. Đây là hành vi bình thường, không chạm vào Cánh tay Robot khi đang hiệu chuẩn.
- Yêu cầu học sinh mở dự án Lab 3 Phần 2 của mình. Dự án mới sẽ được xây dựng dựa trên dự án này. Chọn “Save As” (Lưu dưới dạng) hoặc “Save to Your Device” (Lưu vào thiết bị của bạn) (tùy thuộc vào phiên bản VEXcode GO bạn đang sử dụng) và đổi tên dự án Lab 4 Part 1.

Đổi tên dự án - Nếu có học sinh nào không có mặt trong Bài thực hành 3 hoặc không tìm thấy dự án của mình, hãy yêu cầu các em tạo lại giải pháp Bài thực hành Phần 2 từ Trình chiếu hình ảnh Bài thực hành 4.
 Dung dịch
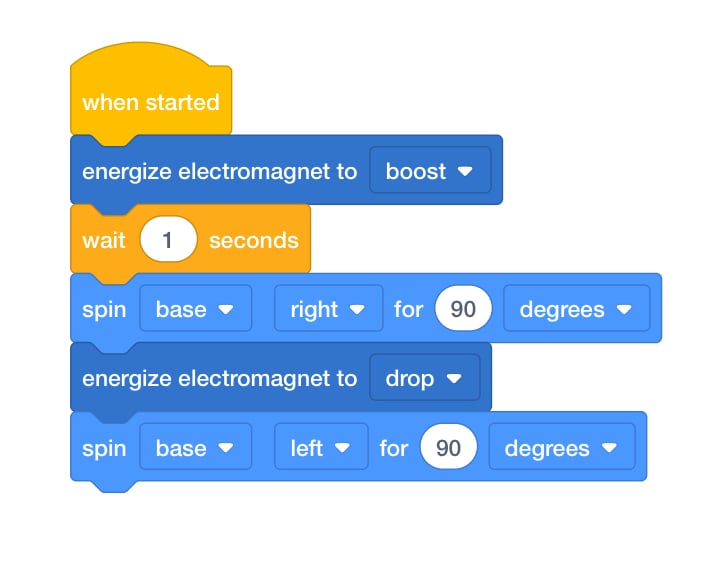
Dung dịch Lab 3 Phần 2 - Kéo khối [Đợi cho đến khi] vào không gian làm việc. Giải thích rằng khối [Chờ cho đến khi] chấp nhận các điều kiện Boolean và sẽ dừng dự án chạy cho đến khi khối bên trong báo cáo một điều kiện là ‘Đúng’.

Thêm chờ đến khi chặn -
Dự án này sẽ sử dụng Cảm biến Mắt để phát hiện xem một vật thể có mặt hay không, để nhặt nó lên. Dữ liệu Cảm biến Mắt là điều kiện Boolean mà chúng ta đang chờ đợi.
 Cảm biến
Cảm biến mắt -
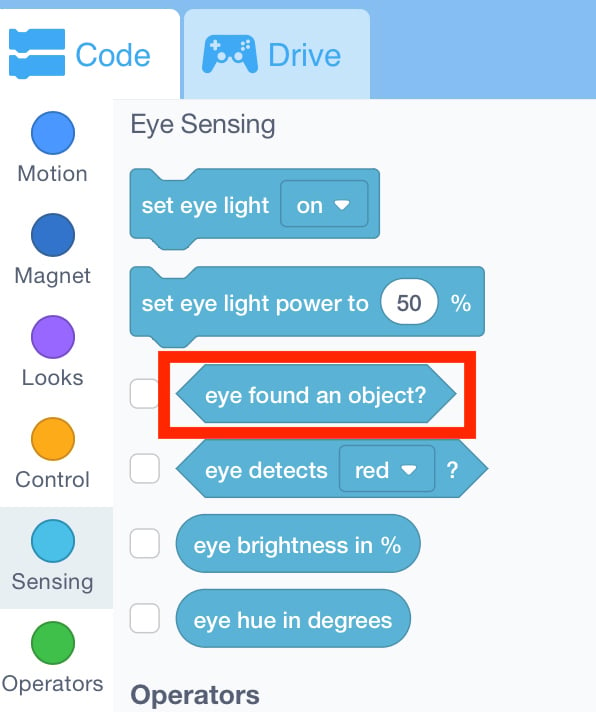
Tìm <Eye found object> khối trong Hộp công cụ bên dưới ‘Cảm biến’. Giải thích rằng the <Eye found object> là một khối Boolean sẽ báo cáo True hoặc False, vì vậy nó có thể được sử dụng với khối [Wait until].
 Danh
Danh mục cảm biến mắt - Kéo <Eye found object> vào khối [Chờ cho đến khi].

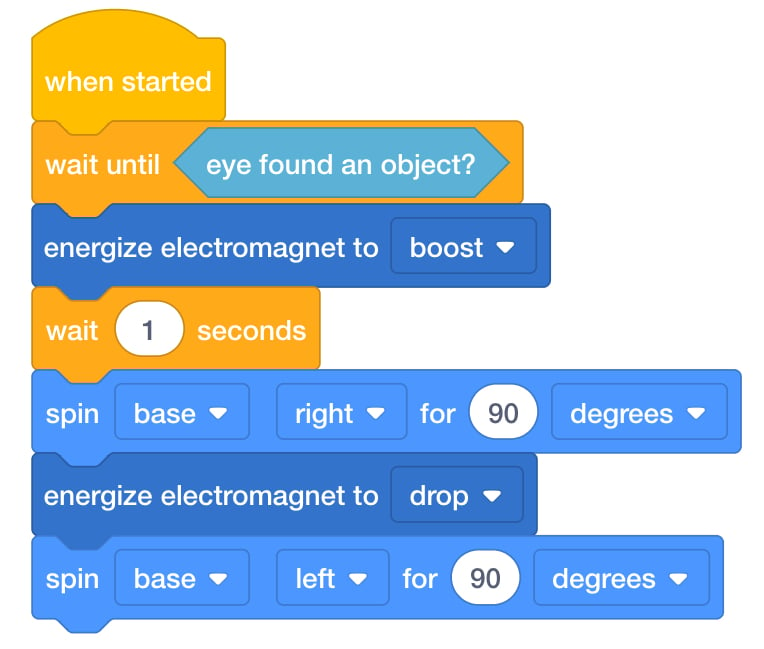
Thêm <Eye Found Object> vào [Chờ đến] - Hỏi học sinh xem họ muốn Cảm biến mắt kiểm tra vật thể ở đâu? Kéo khối [Chờ cho đến] đến đầu dự án.
 Dung dịch
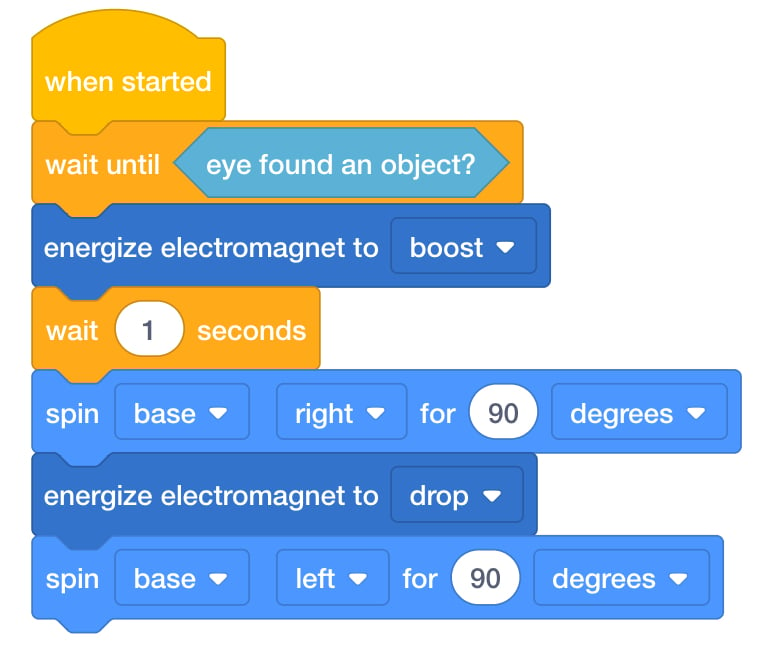
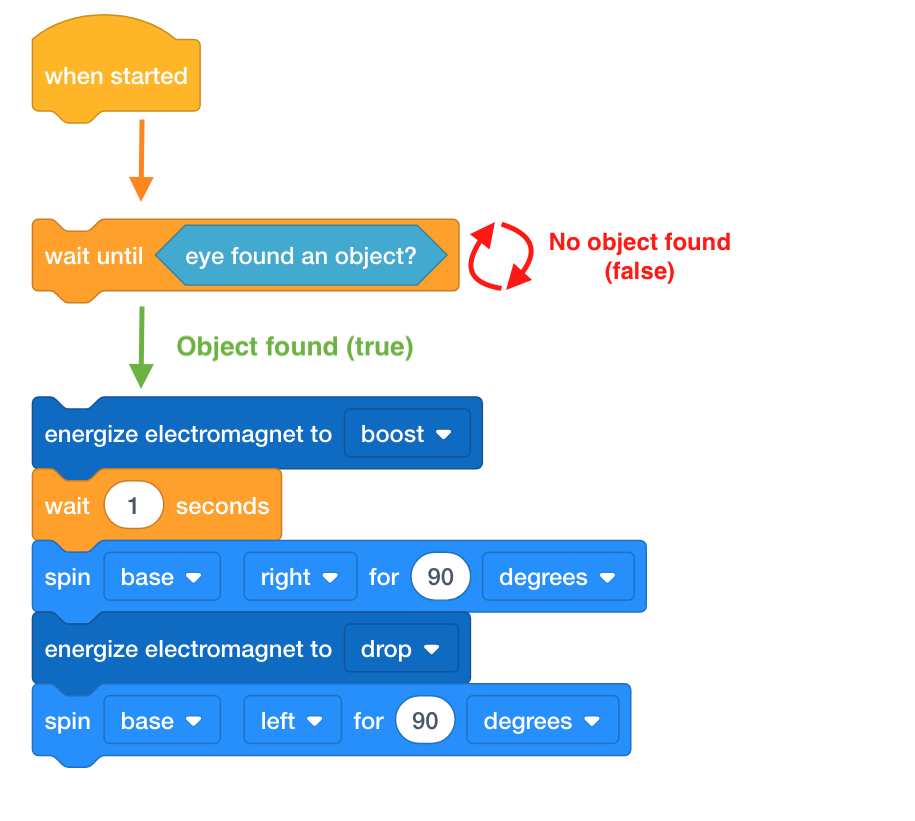
Dung dịch Lab 4 Phần 1 - Yêu cầu học sinh đặt Đĩa trên Nam châm điện và bắt đầu dự án và xem Cánh tay Robot của họ di chuyển như thế nào. Họ nên bắt đầu dự án với một Đĩa được gắn vào Nam châm điện. Nếu họ gặp bất kỳ vấn đề nào khi sử dụng Cảm biến mắt, hãy yêu cầu họ làm theo các bước sau một lần nữa. Nếu cần, hãy xem bài viết Bắt đầu một dự án trong VEXcode GOvà làm mẫu cho học sinh các bước trong bài viết này để bắt đầu một dự án.
- Tạo điều kiệnthuận lợi Tạo điều kiện cho các cuộc đối thoại về quy trình dự án khi học sinh kiểm tra mã của họ. Sử dụng giải pháp được cung cấp trong Trình chiếu Lab 4 để kiểm tra các dự án của họ khi bạn lưu hành.
 Dung dịch
Dung dịch Lab 4 Phần 1 Hỏi các em một số câu hỏi sau đây để châm ngòi cho một cuộc thảo luận.
- Theo cách nói của riêng bạn, bạn sẽ giải thích điều kiện Boolean là gì?
- Bạn nghĩ điều gì sẽ xảy ra nếu chúng ta chuyển khối [Chờ cho đến khi] sang một phần khác của dự án? Luồng dự án sẽ thay đổi như thế nào?
- Nếu bạn muốn di chuyển đĩa thứ hai vào cuối dự án, bạn sẽ cần thêm những khối nào khác?
- Dự án này tương tự hoặc khác với dự án bạn đã thực hiện trong Lab 3 như thế nào?
- Nhắc nhở các nhóm đặt câu hỏi nếu họ bối rối. Không phải mọi nỗ lực sẽ chạy đúng cách. Mỗi khi điều hành dự án, sinh viên nên xác định những gì đã sai và lên ý tưởng về cách khắc phục. Dự kiến sẽ có thử nghiệm và sai sót.
Nếu học viên thất vọng và cần hỗ trợ thêm, hãy yêu cầu các em nhắc lại mục tiêu của dự án với anh chị em.
- Hỏi học sinh những thiết bị nào họ biết có thể sử dụng Cảm biến mắt? (Robot hút bụi, chuông cửa điện tử)
Nếu họ gặp khó khăn trong việc đưa ra danh sách, hãy yêu cầu họ đưa ra danh sách các thiết bị mà họ muốn có Cảm biến Mắt.
- Ví dụ: Tôi muốn có Cảm biến mắt ở cửa sau để mỗi khi con chó muốn ra ngoài, Cảm biến mắt sẽ cho chúng tôi biết con chó đang ở cửa.
Thảo luận giữa giờ nghỉ giải lao & theo nhóm
Ngay sau khi mọi nhóm đã tạo một dự án bằng cách sử dụng Cảm biến mắt và khối [Đợi cho đến khi], hãy cùng nhau trò chuyện ngắn gọn.
Hãy nói về luồng dự án với khối [Chờ cho đến khi].
- Tại sao việc đặt khối [Chờ đến] khi bắt đầu dự án lại quan trọng?
- Điều gì sẽ xảy ra với luồng dự án của chúng tôi nếu khối [Chờ cho đến khi] ở một nơi khác?
- Cánh tay robot của chúng ta có còn hoạt động theo cách chúng ta muốn không?
 Luồng
Luồng
Phần 2 - Từng bước
- Hướng dẫn học viên rằng các em sẽ lặp lại dự án của mình để làm cho Cánh Tay Robot đợi cho đến khi phát hiện đĩa, nhấc đĩa, di chuyển đĩa đến một phần khác của ô, thả đĩa và quay lại vị trí bắt đầu. Xem video bên dưới để xem cách Cánh tay Robot có thể di chuyển đĩa thành công bằng cách đầu tiên cảm nhận đĩa và sau đó nhấc nó lên để di chuyển đến một vị trí khác bằng Nam châm điện.
Tệp video
- Mô hình mẫu cho học sinh cách thay đổi khối [Quay cho] để điều khiển Động cơ tay kẹp.
-
Học sinh nên mở dự án Lab 4 Phần 1 của mình và đổi tên thành Lab 4 Phần 2. Trước khi bắt đầu, hãy đảm bảo học sinh đã kết nối thiết bị của mình với Cánh tay Robot (2 trục) và Cánh tay Robot đã được định cấu hình.

Đổi tên dự án - Kéo khối [Quay để] vào Không gian làm việc. Hỏi học viên xem các em có nhớ cách thay đổi từ ‘nền tảng‘ sang ’cánh tay‘ hay không.
Thêm [Spin for] vào Không gian làm việc - Xem hình ảnh động trong Trình chiếu hình ảnh Phòng thí nghiệm 4 và hỏi học sinh xem cần thêm khối [Xoay để] ở đâu để di chuyển cánh tay theo cách minh họa.
- Học viên có thể sử dụng các khối nhận xét để nhắc nhở bản thân mỗi bước của quy trình là gì. Giải thích rằng các nhận xét chỉ dành cho lập trình viên, không dành cho robot; vì vậy chúng sẽ không ảnh hưởng đến luồng dự án.

[Bình luận] khối - Mô hình hóa kéo một khối nhận xét vào Không gian làm việc và nhập một trong các bước vào khối.
- Chờ cho đến khi phát hiện đĩa
- Nhấc đĩa lên
- Di chuyển đĩa sang phần khác của ô
- Thả đĩa xuống
- Quay trở lại vị trí bắt đầu
- Giải thích rằng các nhận xét chỉ dành cho lập trình viên, không dành cho robot; vì vậy chúng sẽ không ảnh hưởng đến luồng dự án.
 Đã thêm khối
Đã thêm khối [Comment] - Yêu cầu học sinh đặt Đĩa trên Nam châm điện và bắt đầu dự án và xem Cánh tay Robot của họ di chuyển như thế nào. Họ nên bắt đầu dự án bằng cách gắn một chiếc đĩa vào Nam châm điện. Nếu cần, hãy xem bài viết Bắt đầu một dự án trong VEXcode GOvà làm mẫu cho học sinh các bước trong bài viết này để bắt đầu một dự án.
-
- Tạo điều kiệnthuận lợi Tạo điều kiện cho các cuộc đối thoại về luồng dự án khi học sinh bắt đầu lặp lại các dự án của mình.
 Cánh tay robot
Cánh tay robot của bạn nên... Đặt những câu hỏi như:
- Bạn nghĩ điều gì sẽ xảy ra nếu khối [Đợi cho đến khi] được thêm vào sau khi Arm Motor được quay lên? Điều đó sẽ thay đổi luồng dự án của bạn như thế nào?
- Bạn nghĩ tại sao chúng tôi muốn Cánh tay Robot quay trở lại vị trí bắt đầu sau khi thả đĩa xuống?
- Các khối nhận xét có thể giúp bạn hiểu luồng dự án của mình như thế nào khi bạn đang viết mã?
- Nếu bạn muốn di chuyển đĩa thứ hai đến một vị trí hoàn toàn mới, bạn sẽ cần thêm những khối nào khác?
- Nhắc nhở các nhóm đặt câu hỏi nếu họ bối rối. Không phải mọi nỗ lực sẽ chạy đúng cách. Mỗi khi điều hành dự án, sinh viên nên xác định những gì đã sai và lên ý tưởng về cách khắc phục. Dự kiến sẽ có thử nghiệm và sai sót.
Nếu học viên thất vọng và cần hỗ trợ thêm, hãy yêu cầu các em nhắc lại mục tiêu của dự án với anh chị em.
Họ nên sử dụng dự án Lab 4 Phần 1 của mình làm hướng dẫn.
Giải pháp Lab 4 Phần 2 cũng có sẵn để giáo viên tham khảo.
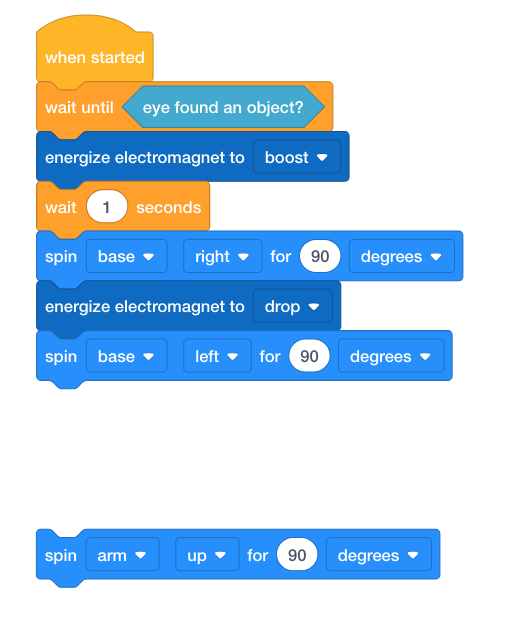
 Dung dịch
Dung dịch Lab 4 Phần 2 - Hỏi học viên xem các em có thể hoàn thành những nhiệm vụ nào khác bằng cách sử dụng cả Động cơ tay đòn và Động cơ cơ bản? Còn trên cánh tay robot lớn hơn thì sao?