
खेल
भाग 1 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे एक प्रोजेक्ट बनाने जा रहे हैं, जिसमें रोबोट आर्म तब तक प्रतीक्षा करेगा जब तक कि डिस्क का पता न चल जाए (आई सेंसर का उपयोग करके), फिर इलेक्ट्रोमैग्नेट का उपयोग करके डिस्क को स्थानांतरित करेगा। नीचे दिए गए वीडियो को देखें कि कैसे रोबोट आर्म डिस्क को पहले महसूस करके और फिर इलेक्ट्रोमैग्नेट का उपयोग करके उसे दाईं ओर खिसकाकर सफलतापूर्वक स्थानांतरित कर सकता है।
वीडियो फाइल
- मॉडलमॉडल [Wait until] ब्लॉक और आई सेंसर का उपयोग करके एक प्रोजेक्ट कैसे बनाएं। छात्रों को प्रोजेक्टेड स्क्रीन पर या लैब 4 स्लाइड शो के माध्यम से आपके साथ चलने को कहें।
- शुरू करने से पहले, सुनिश्चित करें छात्रों ने अपने डिवाइस अपने रोबोट आर्म (2-एक्सिस) से कनेक्ट कर लिया है और रोबोट आर्म कॉन्फ़िगर किया गया है। यदि आवश्यक हो, तो छात्रों को उनके रोबोट आर्म को कॉन्फ़िगर करने की प्रक्रिया में मार्गदर्शन करने के लिए इस आलेख रोबोट आर्म कॉन्फ़िगर करें में दिए गए चरणों का मॉडल बनाएं।
नोट: जब आप पहली बार अपने रोबोट आर्म को अपने डिवाइस से कनेक्ट करते हैं, तो ब्रेन में निर्मित जायरो कैलिब्रेट हो सकता है, जिससे रोबोट आर्म एक पल के लिए अपने आप चलने लगता है। यह एक अपेक्षित व्यवहार है, कैलिब्रेट करते समय रोबोट आर्म को न छुएं।
- छात्रों को अपना लैब 3 भाग 2 प्रोजेक्ट खोलने को कहें। नई परियोजना इसी परियोजना पर आधारित होगी। "इस रूप में सहेजें" या "अपने डिवाइस में सहेजें" चुनें (यह इस पर निर्भर करता है कि आप कौन सा VEXcode GO संस्करण उपयोग कर रहे हैं) और प्रोजेक्ट का नाम बदलें लैब 4 भाग 1.

परियोजना का नाम बदलें - यदि कोई छात्र लैब 3 में उपस्थित नहीं थे या उन्हें अपना प्रोजेक्ट नहीं मिल रहा है, तो उन्हें लैब 4 इमेज स्लाइड शो से लैब 3 भाग 2 समाधान पुनः बनाने को कहें।

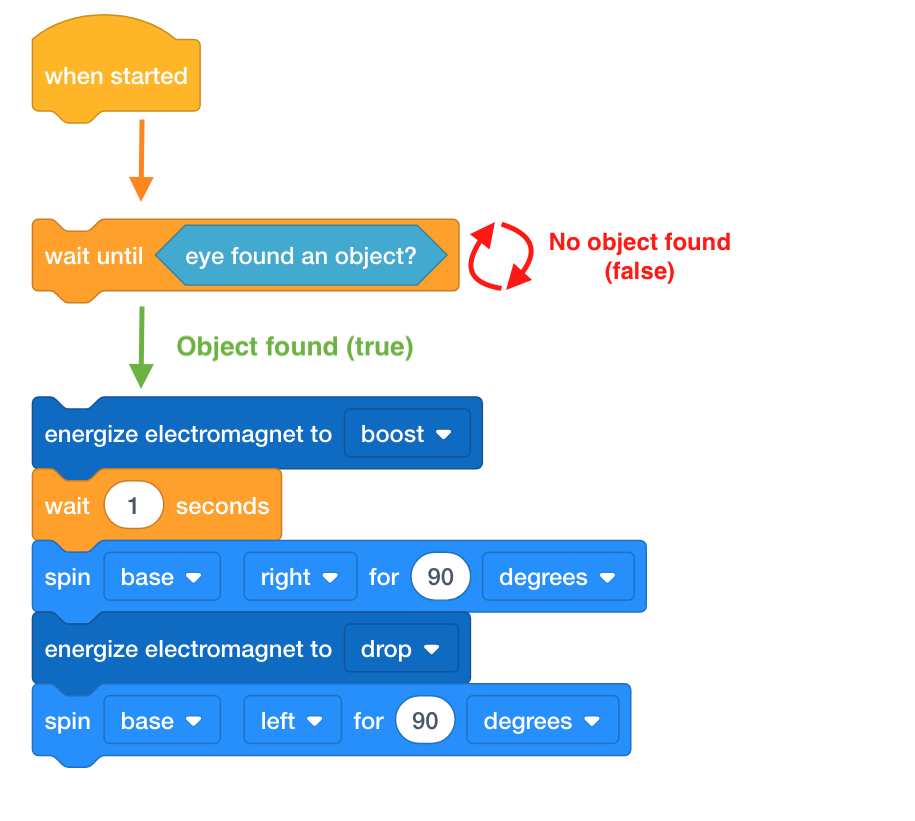
लैब 3 भाग 2 समाधान - [Wait until] ब्लॉक को कार्यक्षेत्र में खींचें. स्पष्ट करें कि [Wait until] ब्लॉक बूलियन शर्तों को स्वीकार करता है, और तब तक प्रोजेक्ट को चलने से रोक देगा जब तक कि अंदर का ब्लॉक किसी शर्त को 'True' के रूप में रिपोर्ट नहीं करता।

ब्लॉक तक प्रतीक्षा जोड़ें-
यह परियोजना नेत्र संवेदक का उपयोग करके यह पता लगाएगी कि कोई वस्तु मौजूद है या नहीं, ताकि उसे उठाया जा सके। नेत्र संवेदक डेटा वह बूलियन स्थिति है जिसका हम इंतजार कर रहे हैं।

नेत्र संवेदक -
'सेंसिंग' के अंतर्गत टूलबॉक्स में <Eye found object> ब्लॉक ढूंढें। बता दें कि <Eye found object> एक बूलियन ब्लॉक है जो सत्य या असत्य की रिपोर्ट करेगा, इसलिए इसका उपयोग [Wait until] ब्लॉक के साथ किया जा सकता है।

नेत्र संवेदन श्रेणी - <Eye found object> को [Wait until] ब्लॉक में खींचें.
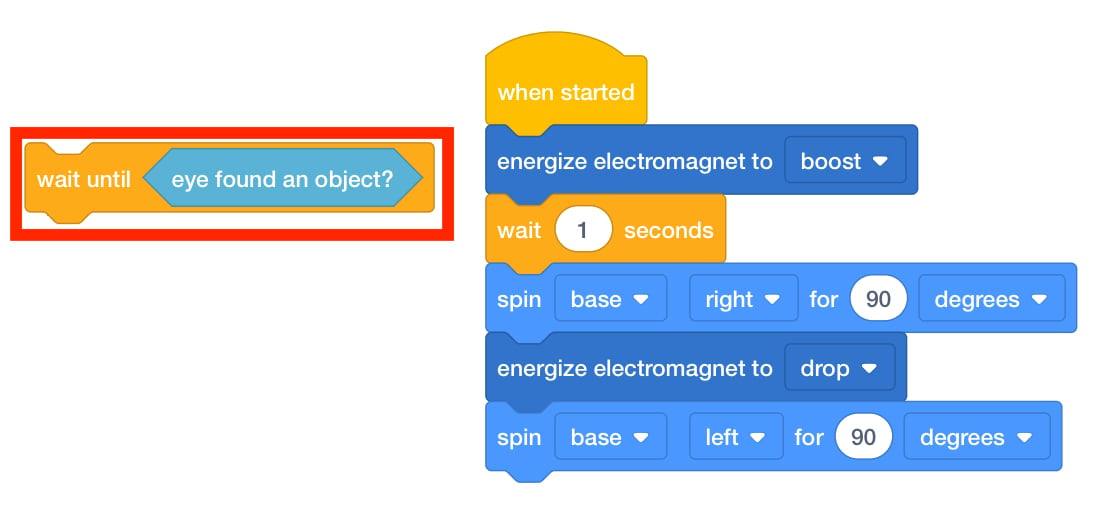
<Eye Found Object> [प्रतीक्षा करें] में जोड़ें- विद्यार्थियों से पूछें कि वे नेत्र संवेदक से किसी वस्तु की जांच कहां करवाना चाहते हैं? [Wait until] ब्लॉक को प्रोजेक्ट के आरंभ तक खींचें.

लैब 4 भाग 1 समाधान - छात्रों को इलेक्ट्रोमैग्नेट पर एक डिस्क रखने को कहें और प्रोजेक्ट शुरू करें तथा देखें कि उनका रोबोट आर्म किस प्रकार चलता है। उन्हें इलेक्ट्रोमैग्नेट से जुड़ी डिस्क के साथ परियोजना शुरू करनी चाहिए। यदि उन्हें नेत्र संवेदक का उपयोग करने में कोई समस्या हो, तो उन्हें पुनः इन चरणों का पालन करने को कहें। यदि आवश्यक हो, तो लेख VEXcode GOमें प्रोजेक्ट शुरू करना देखें, और छात्रों के लिए प्रोजेक्ट शुरू करने के लिए इस लेख में दिए गए चरणों का मॉडल बनाएं।
- सुविधा प्रदान करनाछात्रों द्वारा अपने कोड का परीक्षण करते समय परियोजना प्रवाह के बारे में बातचीत को सुविधाजनक बनाना। लैब 4 स्लाइड शो में दिए गए समाधान का उपयोग करके उनकी परियोजनाओं की जांच करें।

लैब 4 भाग 1 समाधान चर्चा शुरू करने के लिए उनसे निम्नलिखित में से कुछ प्रश्न पूछें।
- अपने शब्दों में आप कैसे समझाएंगे कि बूलियन स्थिति क्या है?
- आपको क्या लगता है कि अगर हम [Wait until] ब्लॉक को परियोजना के किसी अन्य भाग में ले जाएं तो क्या होगा? परियोजना का प्रवाह किस प्रकार बदलेगा?
- यदि आप परियोजना के अंत में दूसरी डिस्क को स्थानांतरित करना चाहते हैं, तो आपको कौन से अन्य ब्लॉक जोड़ने होंगे?
- यह परियोजना आपके द्वारा लैब 3 में बनाई गई परियोजना से किस प्रकार समान या भिन्न है?
- याद दिलाएंसमूहों को याद दिलाएं कि यदि वे भ्रमित हों तो प्रश्न पूछें। हर प्रयास ठीक से नहीं चलेगा. प्रत्येक बार जब वे परियोजना चलाते हैं, तो छात्रों को यह पता लगाना चाहिए कि क्या गलत हुआ और उसे ठीक करने के लिए विचार-मंथन करना चाहिए। परीक्षण और त्रुटि अपेक्षित है।
यदि विद्यार्थी निराश हों और उन्हें अधिक सहायता की आवश्यकता हो, तो उन्हें परियोजना का लक्ष्य दोहराने को कहें।
- पूछेंविद्यार्थियों से पूछें कि वे कौन से उपकरण जानते हैं जिनमें नेत्र संवेदक का उपयोग हो सकता है? (वैक्यूम रोबोट, इलेक्ट्रॉनिक डोरबेल)
यदि उन्हें सूची बनाने में कठिनाई हो रही है, तो उनसे उन उपकरणों की सूची बनाने को कहें जिनके लिए वे आई सेंसर चाहते हैं।
- उदाहरण: मैं अपने पिछले दरवाजे पर एक नेत्र संवेदक (आई सेंसर) लगाना चाहता हूँ, ताकि जब भी कुत्ता बाहर जाना चाहे, तो नेत्र संवेदक हमें बता दे कि कुत्ता दरवाजे पर है।
खेल के बीच में ब्रेक & समूह चर्चा
जैसे ही प्रत्येक समूह ने आई सेंसर और ब्लॉकका उपयोग करके एक प्रोजेक्ट बनाया है, संक्षिप्त बातचीत के लिए एक साथ आएं।
आइये [Wait until] ब्लॉक के साथ परियोजना प्रवाह के बारे में बात करते हैं।
- प्रोजेक्ट के आरंभ में [Wait until] ब्लॉक लगाना क्यों महत्वपूर्ण था?
- यदि [Wait until] ब्लॉक किसी अन्य स्थान पर होता तो हमारे प्रोजेक्ट प्रवाह का क्या होता?
- क्या हमारा रोबोट आर्म अब भी उसी तरह काम करेगा जैसा हम चाहते हैं?
भाग 2 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे अपने प्रोजेक्ट पर रोबोट आर्म को तब तक प्रतीक्षा करने के लिए कहेंगे जब तक कि डिस्क का पता न चल जाए, डिस्क को उठाएं, डिस्क को टाइल के दूसरे भाग में ले जाएं, डिस्क को छोड़ दें, और प्रारंभिक स्थान पर वापस लौट आएं। नीचे दिए गए वीडियो को देखें कि कैसे रोबोट आर्म पहले डिस्क को पहचान कर, तथा फिर इलेक्ट्रोमैग्नेट का उपयोग करके उसे उठाकर दूसरे स्थान पर ले जाकर, डिस्क को सफलतापूर्वक स्थानांतरित कर सकता है।
वीडियो फाइल
- मॉडलछात्रों के लिए मॉडल कि आर्म मोटर को नियंत्रित करने के लिए [स्पिन फॉर] ब्लॉक को कैसे बदला जाए।
-
छात्रों को अपना लैब 4 भाग 1 प्रोजेक्ट खोलना चाहिए और उसका नाम बदलकर लैब 4 भाग 2रखना चाहिए। शुरू करने से पहले, सुनिश्चित करें कि छात्रों ने अपने डिवाइस अपने रोबोट आर्म (2-एक्सिस) से कनेक्ट कर लिया है और रोबोट आर्मकॉन्फ़िगर किया गया है।

परियोजना का नाम बदलें - [स्पिन फॉर] ब्लॉक को कार्यक्षेत्र में खींचें. विद्यार्थियों से पूछें कि क्या उन्हें याद है कि 'आधार' से 'भुजा' में कैसे बदला जाता है।
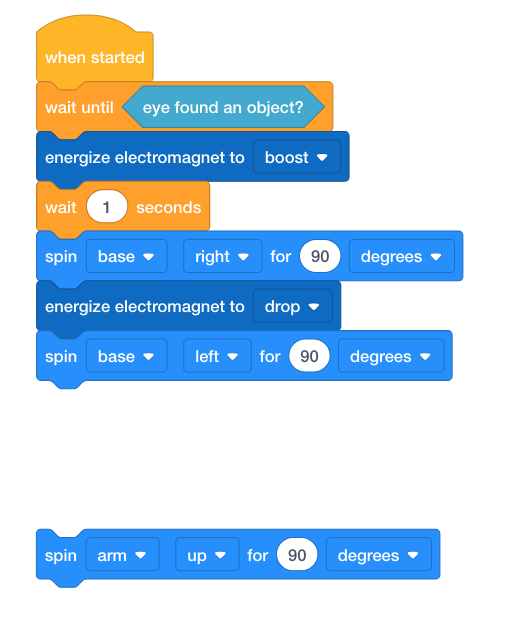
कार्यक्षेत्र में [स्पिन फॉर] जोड़ें - लैब 4 इमेज स्लाइड शो में एनीमेशन देखें और छात्रों से पूछें कि हाथ को दिखाए गए तरीके से चलाने के लिए अतिरिक्त [स्पिन फॉर] ब्लॉक की आवश्यकता कहां है।
- छात्र स्वयं को यह याद दिलाने के लिए टिप्पणी ब्लॉक का उपयोग कर सकते हैं कि प्रक्रिया का प्रत्येक चरण क्या है। समझाएं कि टिप्पणियाँ केवल कोडर के लिए हैं, रोबोट के लिए नहीं; इसलिए वे परियोजना के प्रवाह को प्रभावित नहीं करेंगी।

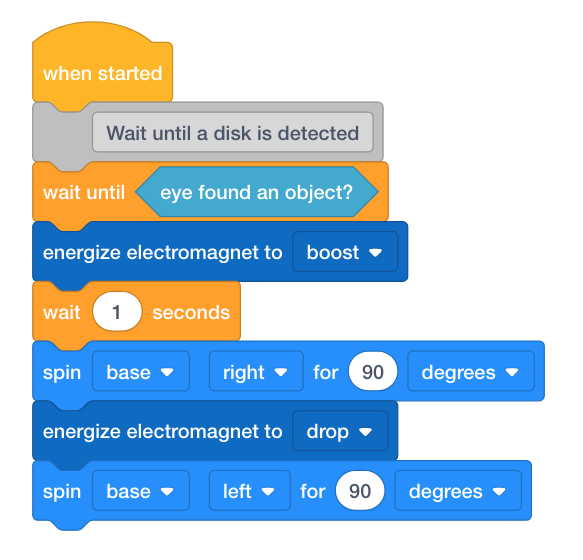
[टिप्पणी] ब्लॉक - किसी टिप्पणी ब्लॉक को कार्यक्षेत्र में खींचकर मॉडल बनाएं और ब्लॉक में किसी एक चरण को लिखें।
- डिस्क का पता लगने तक प्रतीक्षा करें
- डिस्क उठाएँ
- डिस्क को टाइल के दूसरे भाग में ले जाएं
- डिस्क को गिराएं
- प्रारंभिक स्थान पर वापस लौटें
- समझाएं कि टिप्पणियाँ केवल कोडर के लिए हैं, रोबोट के लिए नहीं; इसलिए वे परियोजना के प्रवाह को प्रभावित नहीं करेंगी।
[टिप्पणी] ब्लॉक जोड़ा गया- छात्रों को इलेक्ट्रोमैग्नेट पर एक डिस्क रखने को कहें और प्रोजेक्ट शुरू करें तथा देखें कि उनका रोबोट आर्म किस प्रकार चलता है। उन्हें इलेक्ट्रोमैग्नेट से जुड़ी डिस्क के साथ परियोजना शुरू करनी चाहिए। यदि आवश्यक हो, तो आलेख VEXcode GOमें प्रोजेक्ट प्रारंभ करें देखें, तथा विद्यार्थियों को प्रोजेक्ट प्रारंभ करने के लिए इस आलेख में दिए गए चरणों का मॉडल दिखाएं।
-
- सुविधा प्रदान करनाजब विद्यार्थी अपनी परियोजनाओं पर काम करना शुरू करते हैं तो परियोजना प्रवाह के बारे में बातचीत को सुविधाजनक बनाना।

आपका रोबोट हाथ... इस तरह के प्रश्न पूछें:
- आपको क्या लगता है कि अगर आर्म मोटर चालू होने के बाद [Wait until] ब्लॉक जोड़ दिया जाए तो क्या होगा? इससे आपकी परियोजना का प्रवाह किस प्रकार बदलेगा?
- आपके विचार से हम क्यों चाहते हैं कि रोबोट आर्म डिस्क से गिरने के बाद प्रारंभिक स्थान पर वापस आ जाए?
- कोडिंग करते समय टिप्पणी ब्लॉक आपके प्रोजेक्ट के प्रवाह को समझने में आपकी किस प्रकार सहायता कर सकते हैं?
- यदि आप दूसरी डिस्क को बिल्कुल नए स्थान पर ले जाना चाहें, तो आपको और कौन से ब्लॉक जोड़ने होंगे?
- याद दिलाएंसमूहों को याद दिलाएं कि यदि वे भ्रमित हों तो प्रश्न पूछें। हर प्रयास ठीक से नहीं चलेगा. प्रत्येक बार जब वे परियोजना चलाते हैं, तो छात्रों को यह पता लगाना चाहिए कि क्या गलत हुआ और उसे ठीक करने के लिए विचार-मंथन करना चाहिए। परीक्षण और त्रुटि अपेक्षित है।
यदि विद्यार्थी निराश हों और उन्हें अधिक सहायता की आवश्यकता हो, तो उन्हें परियोजना का लक्ष्य दोहराने को कहें।
उन्हें अपने लैब 4 भाग 1 प्रोजेक्ट को मार्गदर्शक के रूप में उपयोग करना चाहिए।
लैब 4 भाग 2 समाधान शिक्षक संदर्भ के लिए भी उपलब्ध है।

लैब 4 भाग 2 समाधान - पूछेंविद्यार्थियों से पूछें कि आर्म मोटर और बेस मोटर दोनों का उपयोग करके वे कौन से अन्य कार्य पूरे कर सकते हैं? एक बड़े रोबोटिक हाथ के बारे में क्या ख्याल है?