
![]() 教师工具箱
-
机器人行为
教师工具箱
-
机器人行为
“行为”是谈论机器人正在做什么以及必须做什么的一种非常方便的方式。 前进、停止、转弯、寻找障碍物——这些都是行为。
当学生开始编程任务时,他们还应该开始从行为角度思考机器人的动作。 学生编程时应遵循以下步骤:
-
首先,他们制定机器人执行所需动作的计划。
-
接下来,他们将该计划转化为机器人可以遵循的程序。
该计划只是机器人需要遵循的行为序列,而程序只是将这些行为转换为 VEXcode IQ 块。
将任务分解为更小的行为,然后用这些行为构建解决方案是一项可以应用于许多不同主题的技能。 这也是计算思维的一个例子。 有关计算思维的更多信息,请参阅: https://k12cs.org/computational-thinking/
像机器人一样思考
人类非常复杂,可以以非常复杂的方式思考。 有时我们有意识地思考事物,有时则无意识地思考事物。 为了让自己呼吸,你是否必须考虑呼吸? 做一道数学题怎么样? 现在考虑一下你是如何从教室门口走到座位上的。 你是否考虑过每一步和每一个转弯,还是在考虑其他事情?
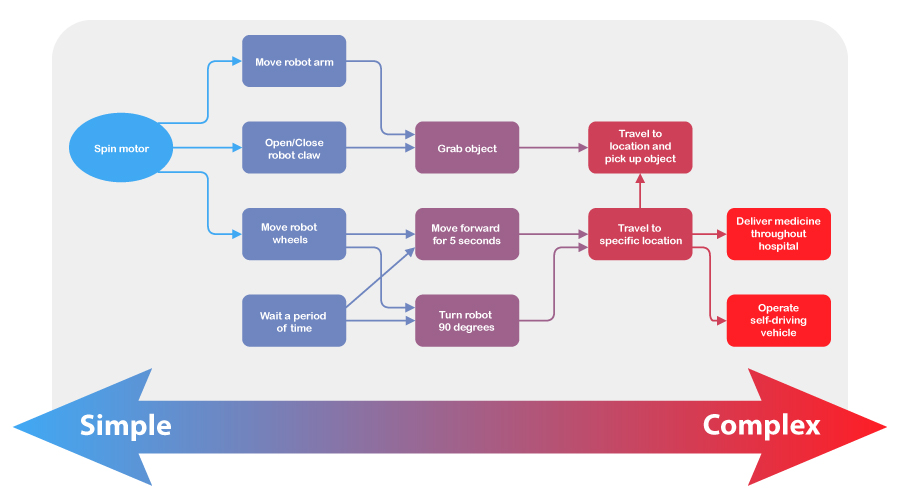
机器人不会思考很多事情,它们也没有像人类那样的潜意识来帮助它们解决问题。 机器人只能做它们被编程的事情。 所有机器人任务都可以分解为更简单的任务,这些更简单的任务被称为行为——机器人编程的构建块。
行为是机器人的一种行为方式,可以从基本到复杂,具体取决于机器人的构建或编程方式。 像自动驾驶仪这样的简单移动机器人只有两个电机,因此它的行为将涉及转动这些电机来实现其目标。 自动驾驶仪将使用简单的行为(例如前进、后退和转向)来完成更大的任务。
那么你如何像机器人一样思考呢? 想象一下您希望机器人执行的任务。 现在想象一下机器人为了执行该任务需要执行的每一步。 这些是您需要编程才能完成任务的行为。
![]() 激发讨论
-
开车时转弯
激发讨论
-
开车时转弯
问: 与前进和倒车一样,转弯是一种重要的基本行为。 为什么您认为首先学习这些行为很重要?
答: 学生可以给出各种各样的答案,但其理念是,在尝试更困难的行为之前,首先学习基本行为很重要。 您可以将其与先学习基本的数学加法和减法事实进行比较,然后再学习在添加较大数字时如何借用和进位。
问: 您估计自己在一天中走动时转身多少次?
答: 学生可以回答任何数字,但很可能是一个非常大的数字! 转身是我们经常做的基本动作。
问: 您能列出多少无需思考即可完成的任务?
答: 学生可以回答任何他们无法有意识控制的活动,例如呼吸或心跳。 学生们还可以回答他们日常生活中不常思考的部分,比如早上刷牙。 指出成年人也会这样做,例如开车上班。 您还可以指出,学生可以同时做很多事情,例如一边哼着歌一边做数学题。
![]() 扩展你的学习
-
像机器人一样思考
扩展你的学习
-
像机器人一样思考
不转弯,你哪儿也去不了! 让学生走到教室门口,数一下他们坐到课桌前需要走多少步和转多少圈。 学生应该在工程笔记本上记录从门到座位的每一部分路径,并尝试绘制带有标签的图表。 一个例子可能是:
-
从门口开始
-
向前走8步
-
左转90度
-
直走4步
-
右转90度
-
坐下
让学生小步追踪他们的路径将使他们思考如何对机器人进行编程来移动和转向以实现目标。