
الدرس 2: القيادة إلى اللون الأخضر ثم الأقراص الزرقاء
القيادة إلى اللون الأخضر ثم الأقراص الزرقاء
- يحتوي المشروع السابق على روبوت الواقع الافتراضي الذي ينعطف يمينًا عندما يكتشف مستشعر العين الأمامية قرصًا أخضر. الآن، قم ببناء مشروع حيث يقوم روبوت الواقع الافتراضي بتشغيل أربعة أقراص على Disk Maze Playground.
-
الهدف هو إنشاء نمط ثابت حيث يدور روبوت الواقع الافتراضي يمينًا عندما يكتشف مستشعر العين الأمامي قرصًا أخضر، ويسارًا عندما يكتشف مستشعر العين الأمامي قرصًا أزرق.

-
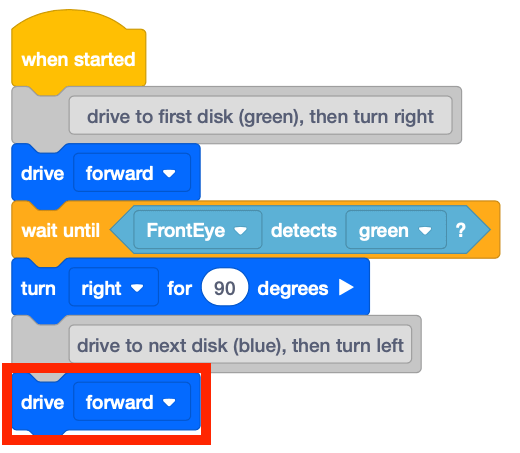
أضف الكتلة التالية إلى المشروع الحالي لتوجيه روبوت الواقع الافتراضي للمضي قدمًا بعد الانعطاف إلى اليمين.
-
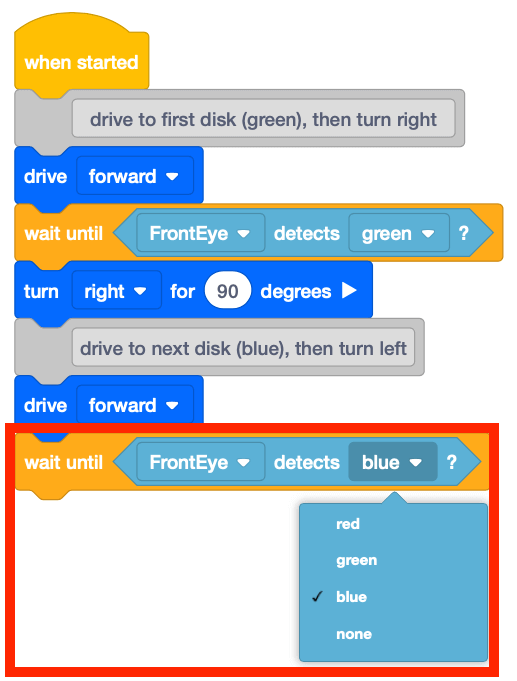
أضف [انتظر حتى] آخر مع تعيين <Color sensing> الكتلة للكشف عن "اللون الأزرق"، لأن القرص التالي الذي سيواجهه روبوت الواقع الافتراضي سيكون باللون الأزرق.
-
أضف كتلة [Turn for] واضبط المعلمة على "يسار".

-
قم بتشغيل المشروع لمعرفة كيفية تحرك روبوت الواقع الافتراضي عبر ملعب متاهة القرص.

- لاحظ أن روبوت الواقع الافتراضي ينعطف يمينًا عندما يكتشف مستشعر العين الأمامي قرصًا أخضر، وينعطف يسارًا عندما يكتشف مستشعر العين الأمامي قرصًا أزرق.
-
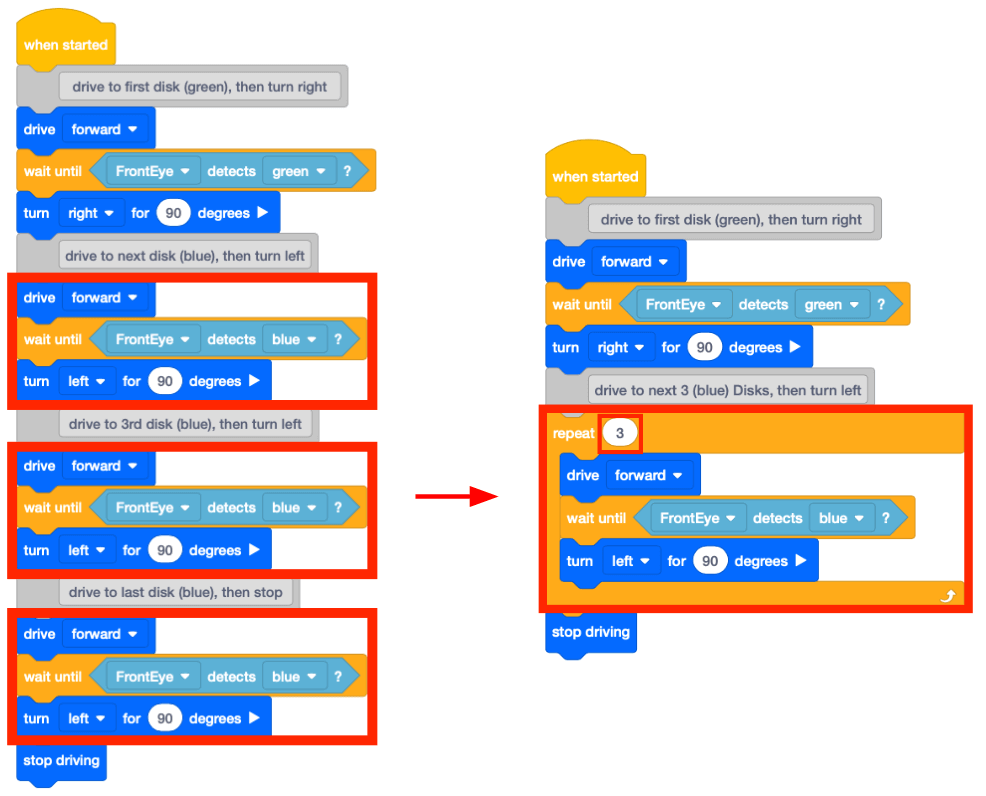
استمر في بناء هذا المشروع لدفع روبوت الواقع الافتراضي إلى قرصين آخرين على ملعب متاهة القرص باستخدام مستشعر العين الأمامي. أضف المكوّنات التالية للتنقل في روبوت الواقع الافتراضي إلى القرصين التاليين ثم توقف:


-
لاحظ أن هناك نمطًا. هناك سلسلة من الكتل تتكرر ثلاث مرات في المشروع. يمكن تكثيف هذا القسم من التعليمات البرمجية باستخدام كتلة [تكرار].
- افتح Disk Maze Playground إذا لم يكن مفتوحًا بالفعل، وقم بتشغيل المشروع.
-
شاهد روبوت الواقع الافتراضي ينتقل إلى أربعة أقراص في ملعب متاهة القرص.

- في هذا المشروع، يتحرك روبوت الواقع الافتراضي للأمام حتى يكتشف مستشعر العين الأمامي اللون الأخضر.
- يتحول روبوت الواقع الافتراضي إلى اليمين 90 درجة ويدفع للأمام مرة أخرى حتى يتم اكتشاف اللون الأزرق.
- ثم يستدير روبوت الواقع الافتراضي إلى اليسار ويدفع للأمام حتى يكتشف مستشعر العين الأمامي اللون الأزرق. بمجرد اكتشاف اللون الأزرق، يتحول روبوت الواقع الافتراضي إلى اليسار مرة أخرى.
- أخيرًا، يتحرك روبوت الواقع الافتراضي للأمام حتى يكتشف مستشعر العين الأمامية اللون الأزرق، ثم يتوقف.
- لاحظ النمط القائل بأنه عندما يكتشف مستشعر العين الأمامي اللون الأخضر، يتحول روبوت الواقع الافتراضي إلى اليمين. عندما يكتشف مستشعر العين الأمامية اللون الأزرق، يتحول روبوت الواقع الافتراضي إلى اليسار في هذا المشروع.
استخدام كتل المفاتيح
حتى الآن، قمت بإنشاء مشروع للقيادة إلى القرص الأخضر ثم الأقراص الزرقاء الثلاثة.
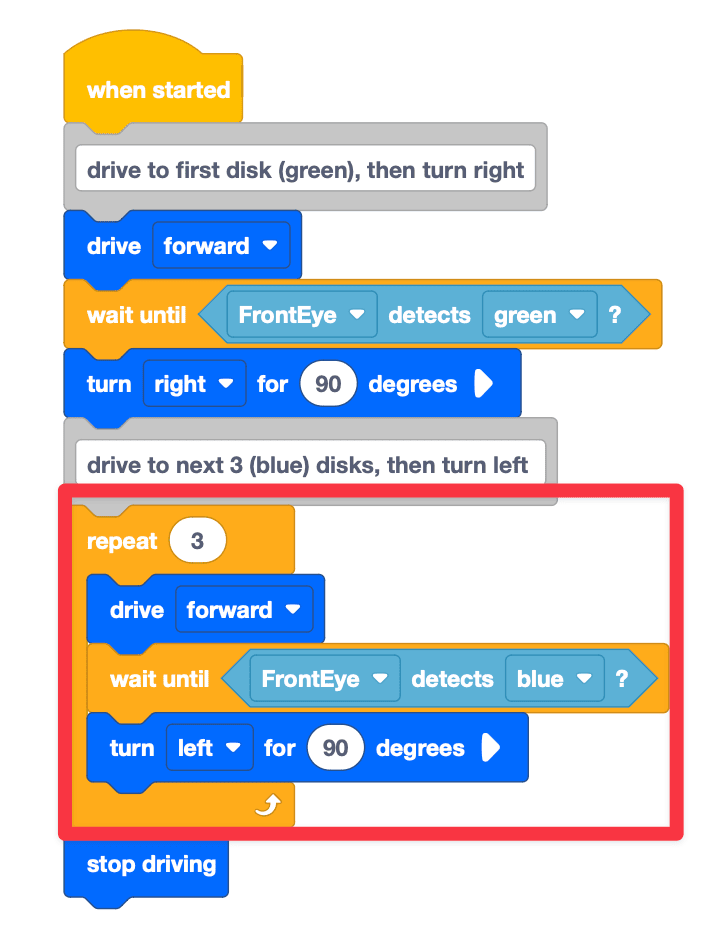
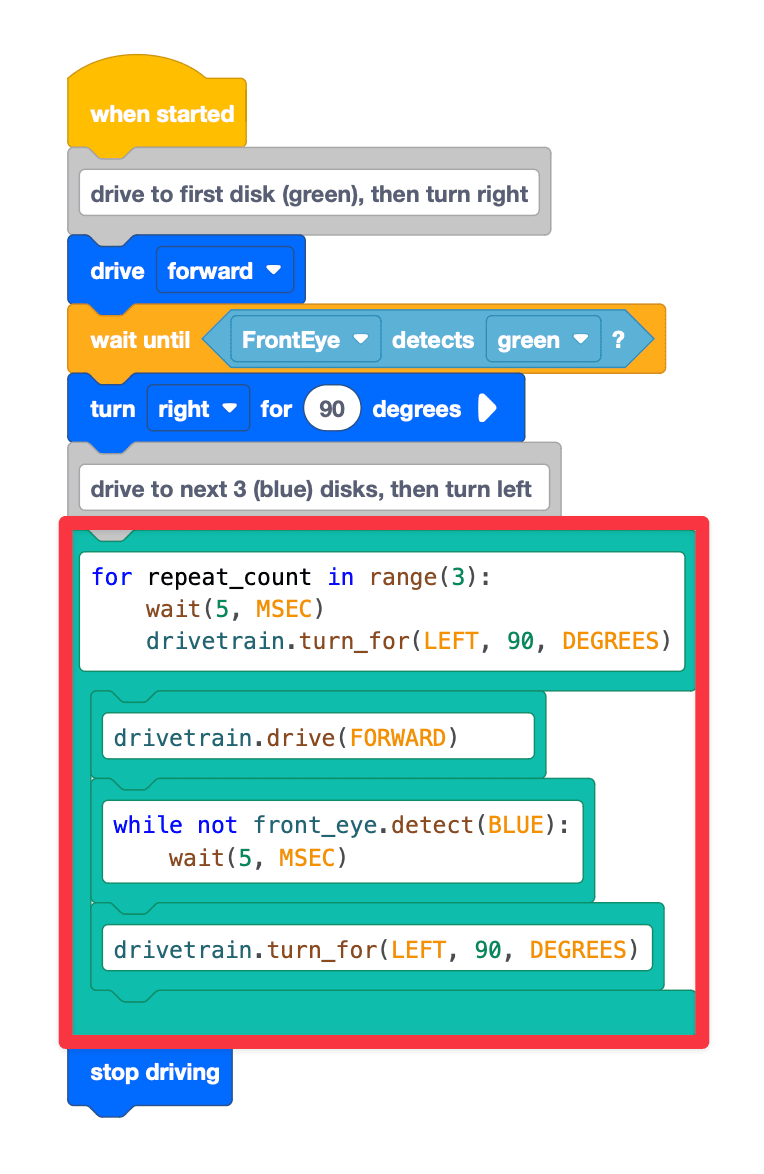
توضح الصورة أدناه المشروع بأكمله باستخدام كتل VEXcode، مع السلوكيات المتكررة المستخدمة للقيادة إلى الأقراص الزرقاء الثلاثة المربعة باللون الأحمر.
يوضح المشروع أدناه كتل VEXcode نفسها التي تم تحويلها إلى كتل تبديل متعددة.
يعرض هذا المشروع الأخير نفس أوامر كتلة التبديل التي تم تحويلها إلى أوامر بايثون داخل كتلة تبديل واحدة.
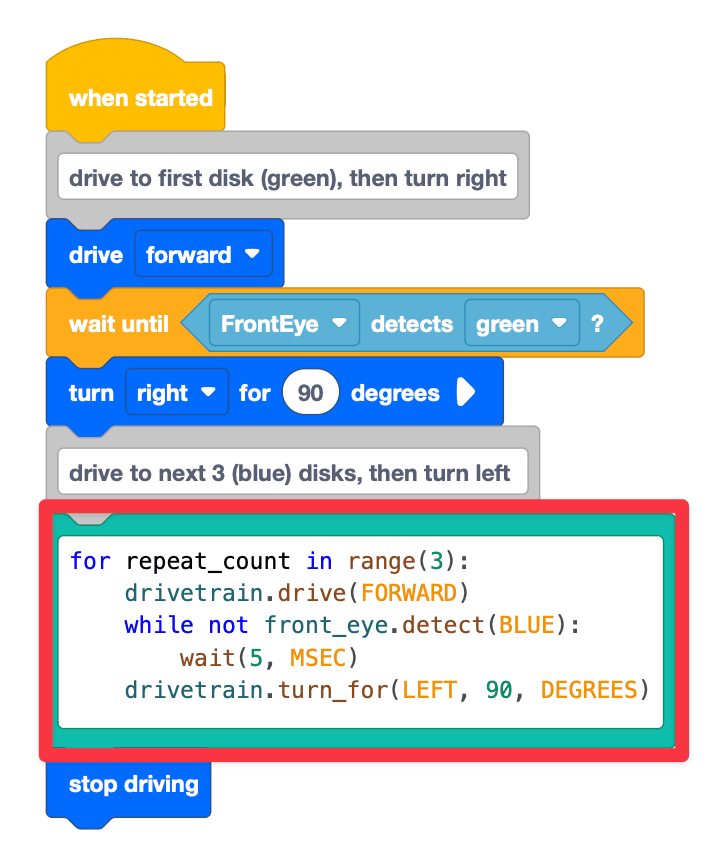
FOR REPEAT_COUNT في النطاق(3): هو أمر Python الذي يخبر الروبوت أنه يجب تكرار أسطر التعليمات البرمجية البادئة التالية ثلاث مرات. لاحظ أنه يجب عليك تضمين نقطتين () بعد حلقة FOR.
الأسطر اللاحقة من التعليمات البرمجية هي السلوكيات التي سيتم تكرارها. لاحظ أن هذه السلوكيات يتم تثبيتها بمسافة بادئة في 4 مسافات افتراضية.
بالإضافة إلى ذلك، لاحظ أن الشرط يتضمن الأمر wait (5, MSEC). في VEXcode VR، يتم دائمًا إضافة الأمر wait مع حلقة for. الغرض من الأمر wait هو التأكد من أن VEXcode VR يمكنه تشغيل المشروع بشكل صحيح كما هو مقصود، نظرًا لطبيعة منصة VEXcode VR المستندة إلى الويب. لا ينبغي أبدًا حذف الأمر wait عند استخدام حلقة for، وإلا فقد لا يعمل مشروعك كما هو مقصود.
يتم وضع السطر wait (5, MSEC) أسفل الأمر while not front_eye.detect(BLUE) لأن مستشعر العين الأمامية سوف يتحقق من اللون الأزرق، ويتوقف لمدة 5 MSEC بين كل فحص.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.