
Lezione 2: Drive to Green then Blue Disks
Drive to Green then Blue Disks
- Il progetto precedente prevede che il robot VR svolti a destra quando il sensore oculare anteriore rileva un disco verde. Ora, costruisci un progetto in cui il robot VR si sposta su quattro dischi nel Disk Maze Playground.
-
L'obiettivo è creare un modello coerente in cui il robot VR gira a destra quando il sensore oculare anteriore rileva un disco verde e a sinistra quando il sensore oculare anteriore rileva un disco blu.

-
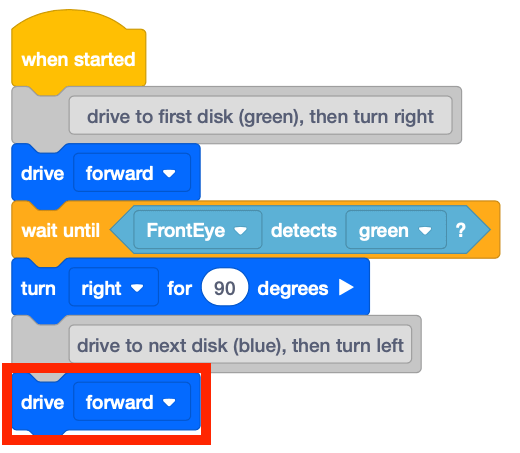
Aggiungere il seguente blocco al progetto esistente per indicare al robot VR di avanzare dopo aver svoltato a destra.
-
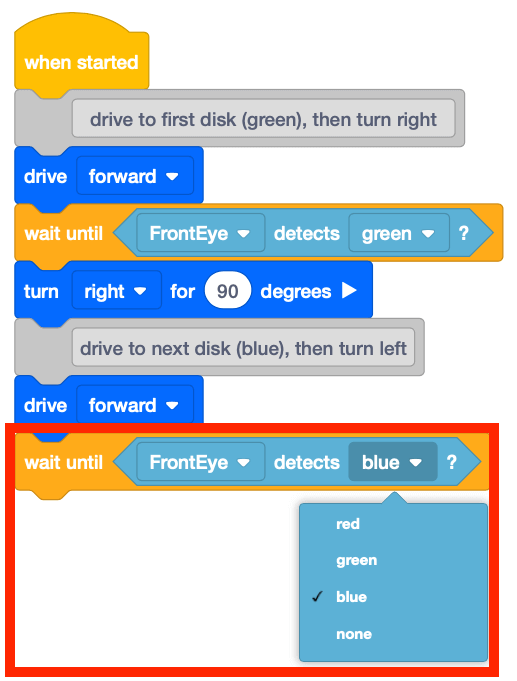
Aggiungere un altro [Attendere fino a] con il <Color sensing> blocco impostato su "blu", poiché il disco successivo che il robot VR incontrerà è blu.
-
Aggiungere un blocco [Turn for] e impostare il parametro su "left".

-
Esegui il progetto per vedere come il robot VR si muove attraverso il Disk Maze Playground.

- Si noti che il robot VR gira a destra quando il sensore oculare anteriore rileva un disco verde e gira a sinistra quando il sensore oculare anteriore rileva un disco blu.
-
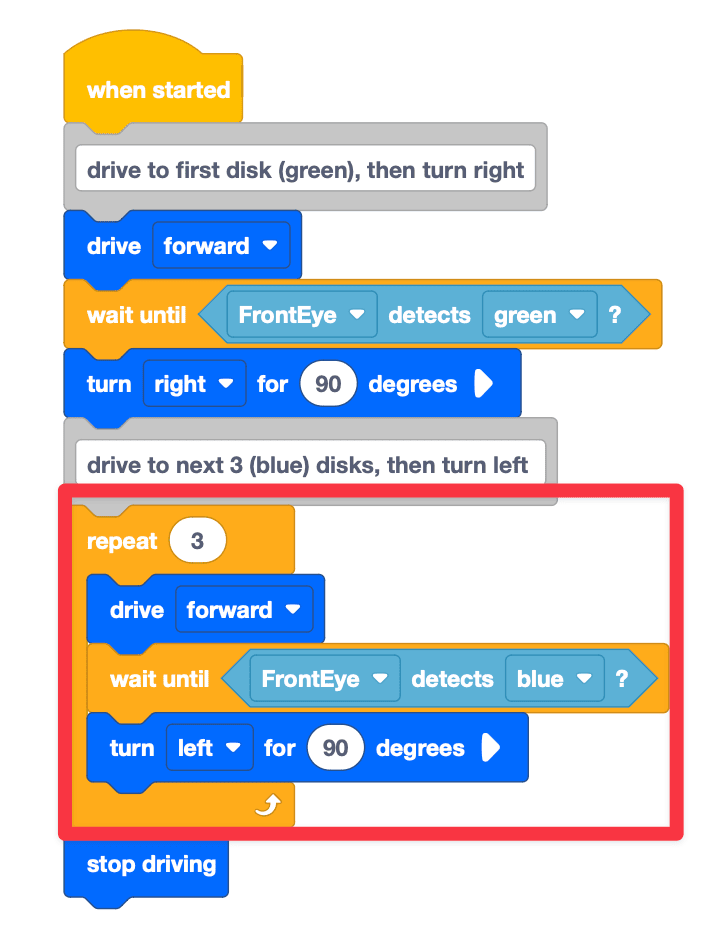
Continuare a costruire questo progetto per guidare il robot VR su altri due dischi nel parco giochi del labirinto del disco utilizzando il sensore dell'occhio anteriore. Aggiungere i seguenti blocchi per navigare dal robot VR ai due dischi successivi, quindi fermarsi:


-
Si noti che c'è uno schema. C'è una serie di blocchi che vengono ripetuti tre volte nel progetto. Questa sezione di codice può essere condensata utilizzando un blocco [Repeat].

- Aprire il Disk Maze Playground se non è già aperto ed eseguire il progetto.
-
Guarda il robot VR navigare su quattro dischi nel Disk Maze Playground.

- In questo progetto, il robot VR avanza fino a quando il sensore oculare anteriore rileva il colore verde.
- Il robot VR gira a destra di 90 gradi e avanza di nuovo fino a quando non viene rilevato il colore blu.
- Il robot VR gira quindi a sinistra e avanza fino a quando il sensore oculare anteriore rileva il blu. Una volta rilevato il colore blu, il robot VR gira di nuovo a sinistra.
- Infine, il robot VR avanza fino a quando il sensore oculare anteriore rileva il blu, quindi si ferma.
- Si noti il modello che quando il sensore dell'occhio anteriore rileva il verde, il robot VR gira a destra. Quando il sensore dell'occhio anteriore rileva il blu, il robot VR gira a sinistra in questo progetto.
Utilizzo di blocchi di interruttori
Finora, hai creato un progetto per guidare sul disco verde e poi sui tre dischi blu.
L'immagine seguente mostra l'intero progetto utilizzando i blocchi VEXcode, con i comportamenti ripetuti utilizzati per guidare verso i tre dischi blu in rosso.
Il progetto seguente mostra questi stessi blocchi VEXcode convertiti in più blocchi Switch.
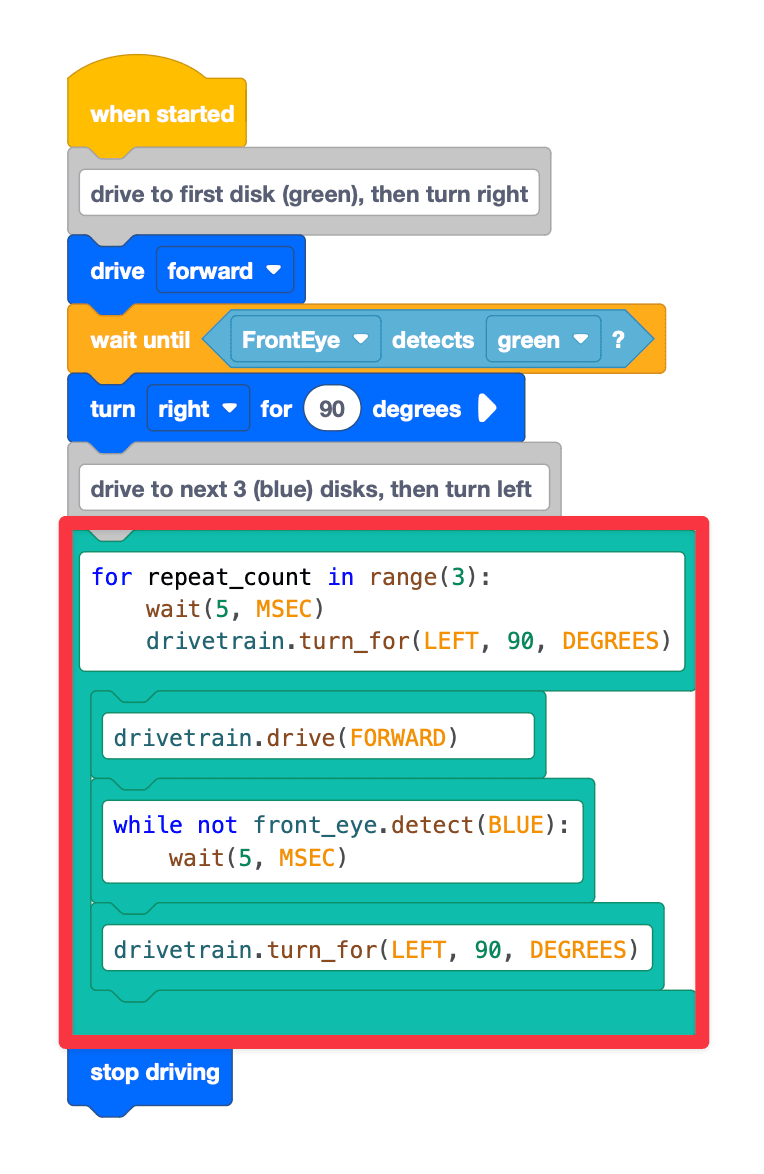
Quest' ultimo progetto mostra gli stessi comandi del blocco Switch convertiti in comandi Python all'interno di un blocco Switch.
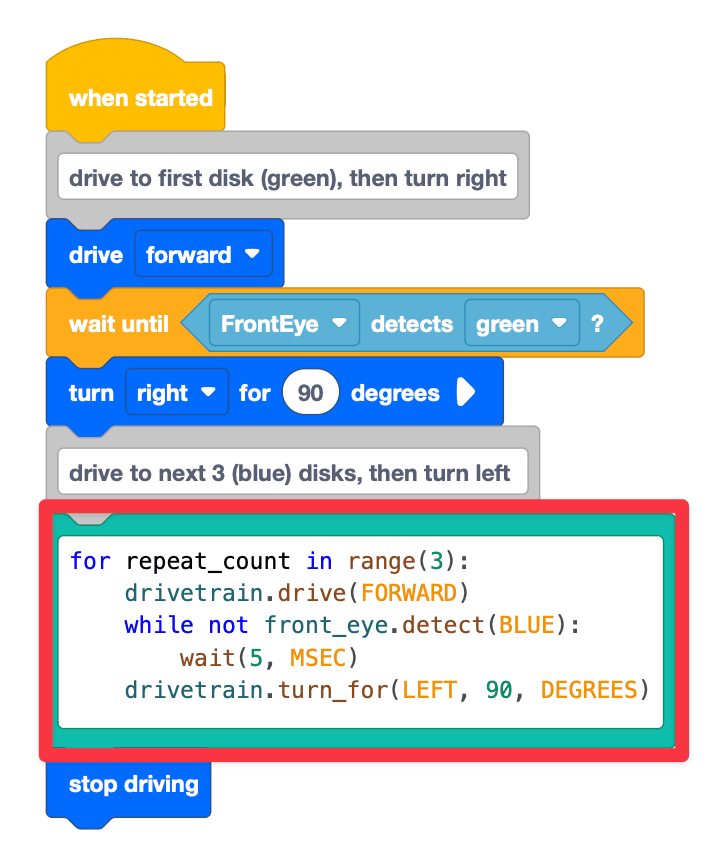
Il for repeat_count in range(3): è il comando Python che dice al robot che le prossime righe di codice rientrate devono essere ripetute tre volte. Si noti che è necessario includere i due punti (:) dopo il ciclo for.
Le righe di codice successive sono i comportamenti che verranno ripetuti. Si noti che questi comportamenti sono rientrati con un valore predefinito di 4 spazi.
Inoltre, si noti che la condizione include il comando wait (5, MSEC). In VEXcode VR, un comando wait viene sempre aggiunto con il ciclo for. Lo scopo del comando wait è garantire che VEXcode VR possa eseguire correttamente il progetto come previsto, grazie alla natura basata sul Web della piattaforma VEXcode VR. Il comando wait non dovrebbe mai essere eliminato quando si utilizza un ciclo for, altrimenti il progetto potrebbe non funzionare come previsto.
La riga wait (5, MSEC) è rientrata sotto il comando while not front_eye.detect(BLUE) perché il sensore dell'occhio frontale controllerà il colore blu, con una pausa di 5 MSEC tra ogni controllo.
Selezionare il pulsante Avanti per continuare con il resto della lezione.