
Leçon 2 : Passez aux disques verts puis bleus
Conduisez vers les disques verts puis bleus
- Dans le projet précédent, le robot VR tourne à droite lorsque le capteur oculaire frontal détecte un disque vert. Maintenant, construisez un projet où le robot VR se déplace vers quatre disques sur le terrain de jeu Disk Maze.
-
L'objectif est de créer un motif cohérent où le robot VR tourne à droite lorsque le capteur oculaire frontal détecte un disque vert, et à gauche lorsque le capteur oculaire frontal détecte un disque bleu.

-
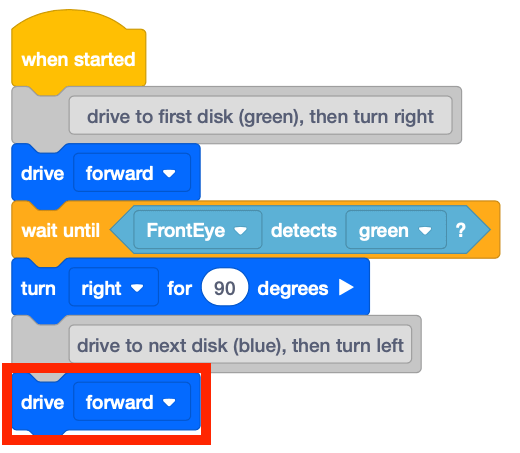
Ajoutez le bloc suivant au projet existant pour demander au robot VR d'avancer après avoir tourné à droite.
-
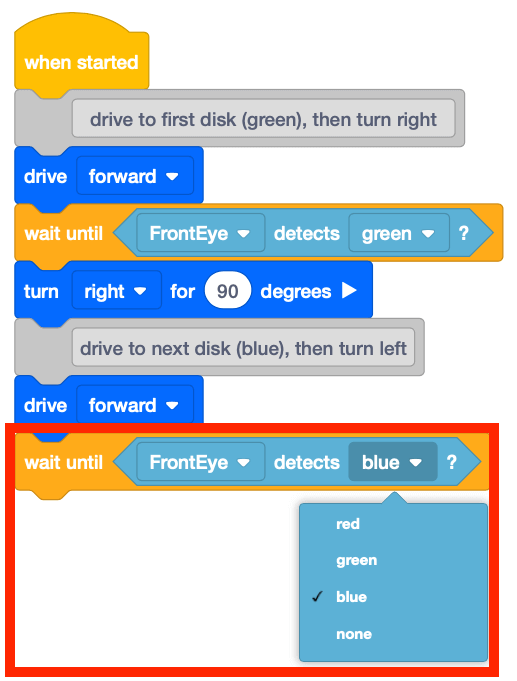
Ajoutez un autre [Attendre jusqu'à] avec le <Color sensing> bloc défini pour détecter « bleu », car le prochain disque que le robot VR rencontrera est bleu.
-
Ajoutez un bloc [Turn for] et définissez le paramètre sur « left ».

-
Exécutez le projet pour voir comment le robot VR se déplace dans le terrain de jeu du labyrinthe de disques.

- Notez que le robot VR tourne à droite lorsque le capteur oculaire frontal détecte un disque vert, et tourne à gauche lorsque le capteur oculaire frontal détecte un disque bleu.
-
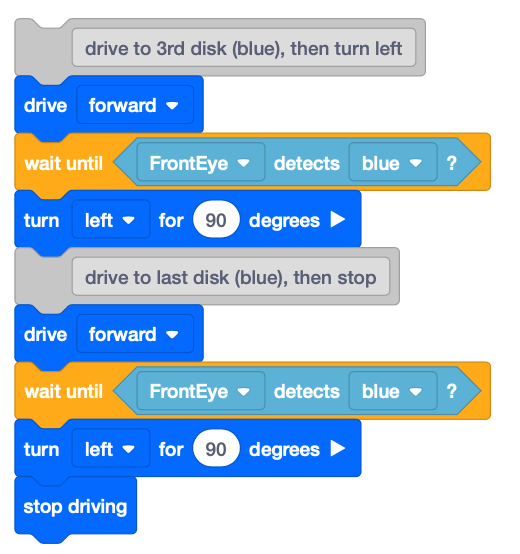
Continuez à construire ce projet pour piloter le robot VR vers deux autres disques sur le terrain de jeu Disk Maze à l' aide du capteur oculaire avant. Ajoutez les blocs suivants pour naviguer dans le robot VR vers les deux disques suivants, puis arrêtez :

-
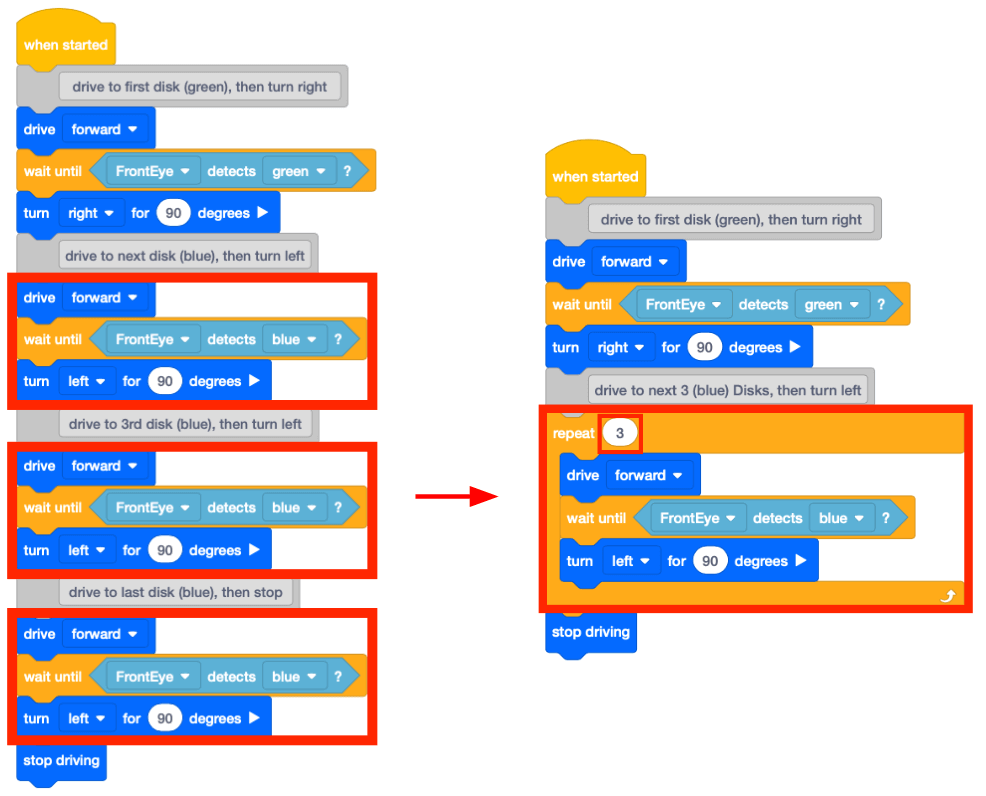
Remarquez qu'il y a un motif. Il y a une série de blocs qui sont répétés trois fois dans le projet. Cette section de code peut être condensée en utilisant un bloc [Répéter].
- Ouvrez le Disk Maze Playground s'il n'est pas déjà ouvert et exécutez le projet.
-
Regardez le robot VR naviguer sur quatre disques sur le terrain de jeu Disk Maze.

- Dans ce projet, le robot VR avance jusqu'à ce que le capteur oculaire frontal détecte la couleur verte.
- Le robot VR tourne à droite à 90 degrés et avance à nouveau jusqu'à ce que la couleur bleue soit détectée.
- Le robot VR tourne alors à gauche et avance jusqu'à ce que le capteur oculaire frontal détecte le bleu. Une fois la couleur bleue détectée, le robot VR tourne à nouveau à gauche.
- Enfin, le robot VR avance jusqu'à ce que le capteur oculaire frontal détecte le bleu, puis s'arrête.
- Notez que lorsque le capteur oculaire avant détecte le vert, le robot VR tourne à droite. Lorsque le capteur oculaire frontal détecte le bleu, le robot VR tourne à gauche dans ce projet.
Utilisation des blocs de commutation
Jusqu'à présent, vous avez créé un projet pour accéder au disque vert, puis aux trois disques bleus.
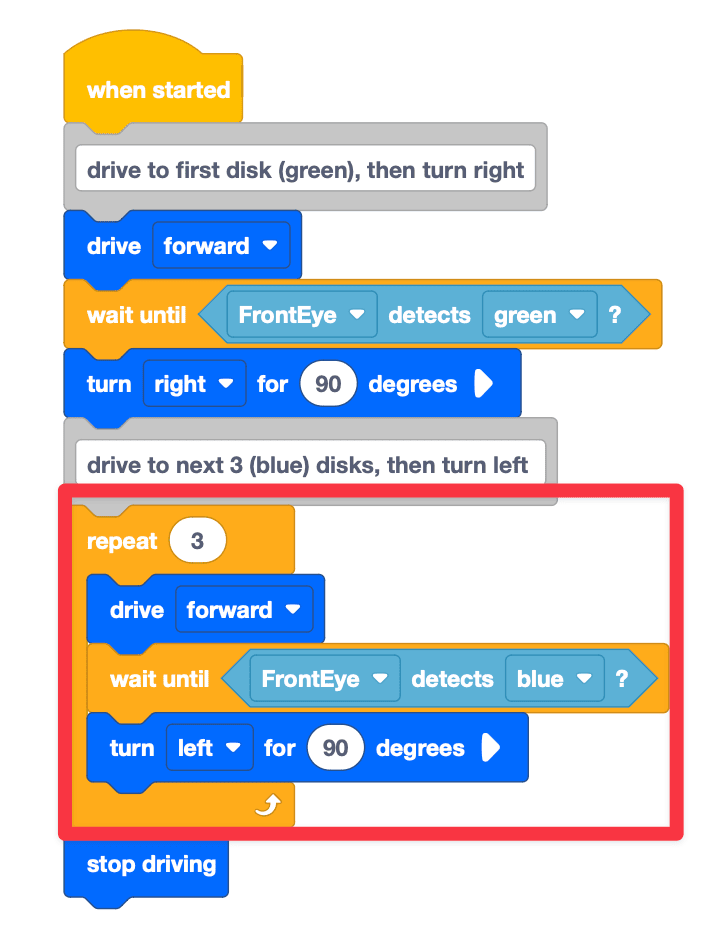
L'image ci-dessous montre l'ensemble du projet à l'aide de blocs VEXcode, avec les comportements répétés utilisés pour conduire vers les trois disques bleus encadrés en rouge.
Le projet ci-dessous montre ces mêmes blocs VEXcode convertis en plusieurs blocs Switch.
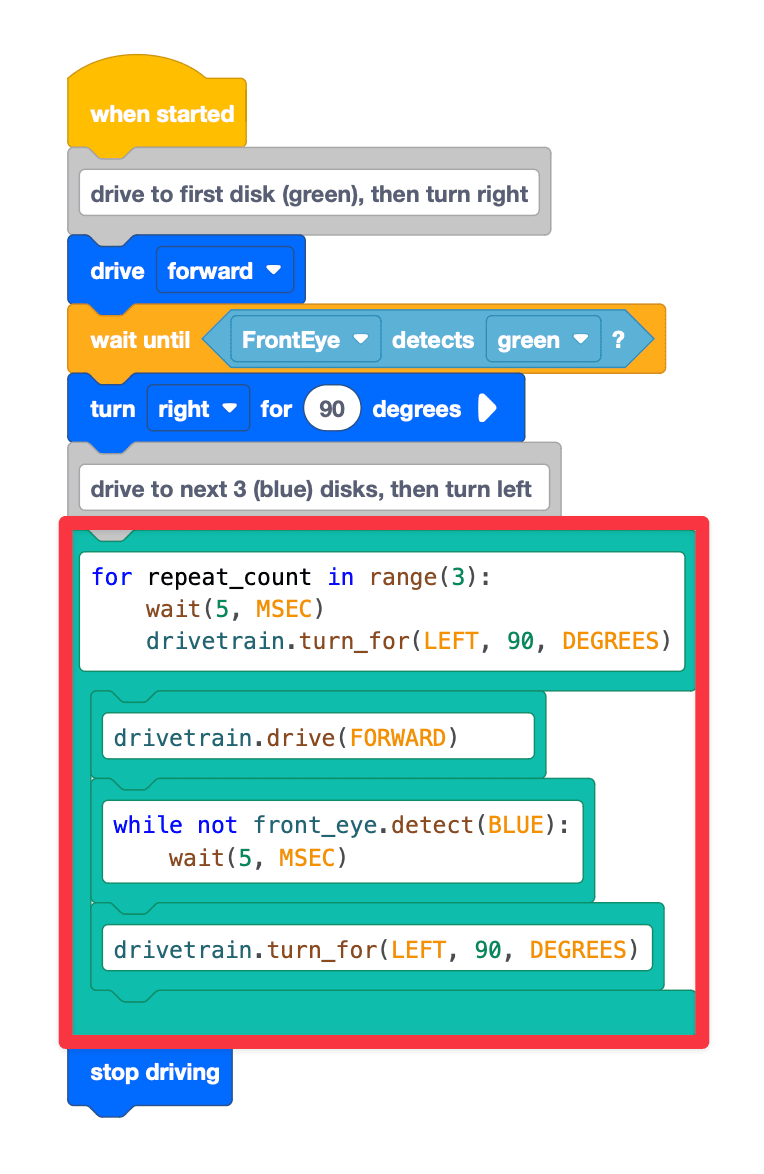
Ce dernier projet affiche les mêmes commandes de bloc Switch converties en commandes Python dans un bloc Switch.
Le for repeat_count dans la plage(3) : est la commande Python qui indique au robot que les prochaines lignes de code en retrait doivent être répétées trois fois. Notez que vous devez inclure un deux-points (:) après la boucle for.
Les lignes de code suivantes sont les comportements qui seront répétés. Notez que ces comportements sont indentés à une valeur par défaut de 4 espaces.
De plus, notez que la condition inclut la commande wait (5, MSEC). Dans VEXcode VR, une commande wait est toujours ajoutée avec la boucle for. L'objectif de la commande wait est de garantir que VEXcode VR peut exécuter correctement le projet comme prévu, en raison de la nature Web de la plate-forme VEXcode VR. La commande wait ne doit jamais être supprimée lors de l'utilisation d'une boucle for, sinon votre projet risque de ne pas fonctionner comme prévu.
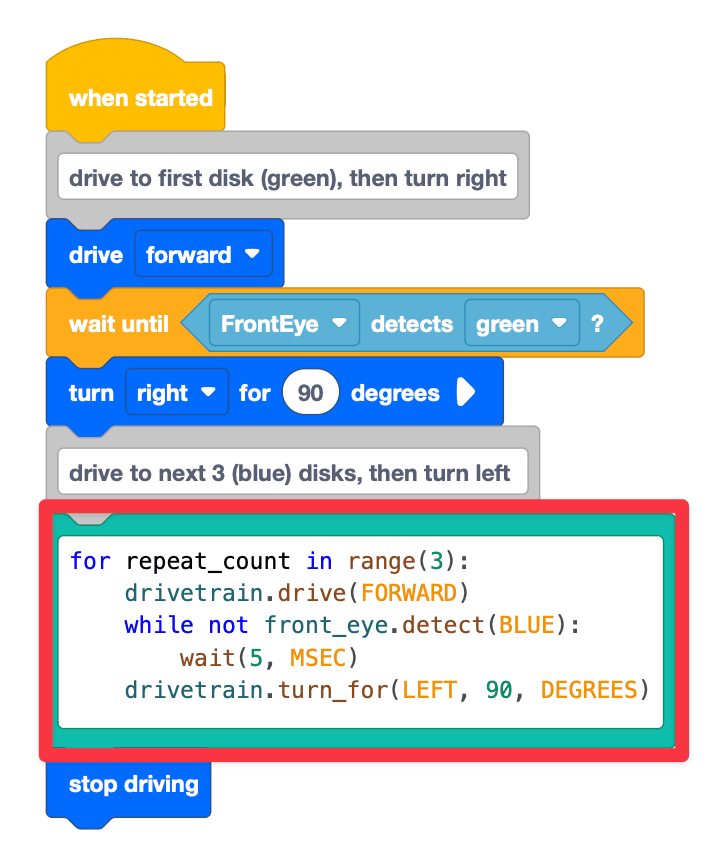
La ligne wait (5, MSEC) est en retrait sous la commande while not front_eye.detect(BLUE) car le capteur Front Eye vérifiera la couleur bleue, en faisant une pause de 5 MSEC entre chaque vérification.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.