
पाठ 2: हरे और फिर नीले डिस्क पर ड्राइव करें
ग्रीन और फिर ब्लू डिस्क पर ड्राइव करें
- पिछली परियोजना में जब फ्रंट आई सेंसर हरे रंग की डिस्क का पता लगाता है तो वीआर रोबोट दाईं ओर मुड़ जाता है। अब, एक प्रोजेक्ट बनाएं जहां वीआर रोबोट डिस्क भूलभुलैया खेल के मैदानपर चार डिस्क पर ड्राइव करता है।
-
इसका लक्ष्य एक सुसंगत पैटर्न बनाना है, जहां फ्रंट आई सेंसर द्वारा हरे रंग की डिस्क का पता लगाने पर वीआर रोबोट दाईं ओर मुड़ जाए, तथा फ्रंट आई सेंसर द्वारा नीले रंग की डिस्क का पता लगाने पर बाईं ओर मुड़ जाए।

-
वीआर रोबोट को दाईं ओर मुड़ने के बाद आगे बढ़ने का निर्देश देने के लिए मौजूदा प्रोजेक्ट में निम्नलिखित ब्लॉक जोड़ें।
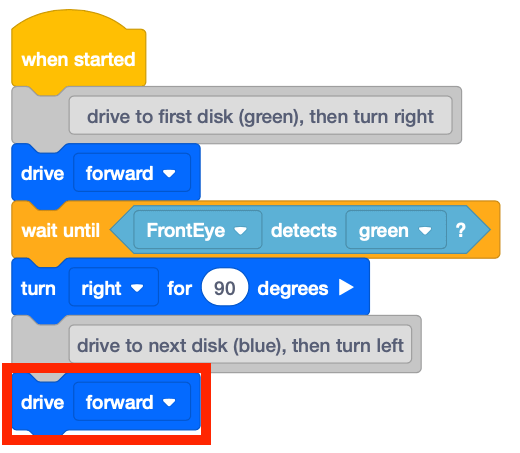
-
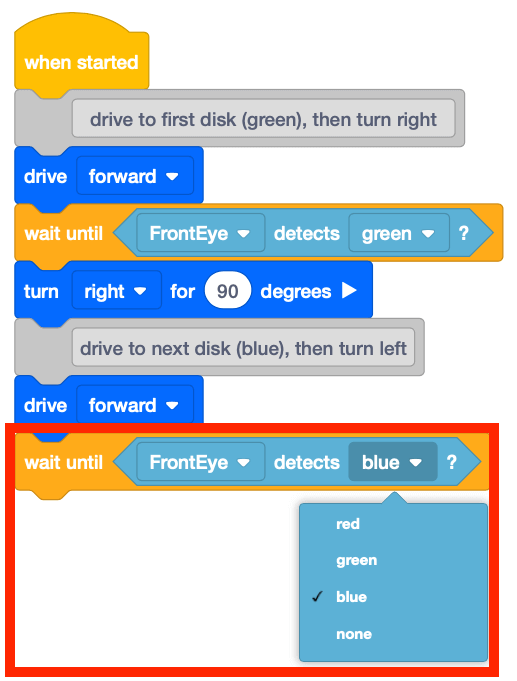
'नीले' का पता लगाने के लिए <Color sensing> ब्लॉक सेट के साथ एक और [प्रतीक्षा करें] जोड़ें, क्योंकि अगली डिस्क जो VR रोबोट को मिलेगी वह नीले रंग की है।
-
[Turn for] ब्लॉक जोड़ें और पैरामीटर को 'बाएं' पर सेट करें।

-
यह देखने के लिए प्रोजेक्ट चलाएं कि वीआर रोबोट डिस्क भूलभुलैया खेल के मैदानके माध्यम से कैसे चलता है।

- ध्यान दें कि जब फ्रंट आई सेंसर हरे रंग की डिस्क का पता लगाता है तो वीआर रोबोट दाईं ओर मुड़ जाता है, और जब फ्रंट आई सेंसर नीले रंग की डिस्क का पता लगाता है तो बाईं ओर मुड़ जाता है।
-
फ्रंट आई सेंसर का उपयोग करके डिस्क भूलभुलैया खेल के मैदान पर दो और डिस्क पर वीआर रोबोट को चलाने के लिए इस परियोजना का निर्माण जारी रखें। वीआर रोबोट को अगले दो डिस्क पर ले जाने के लिए निम्नलिखित ब्लॉक जोड़ें और फिर रुकें:
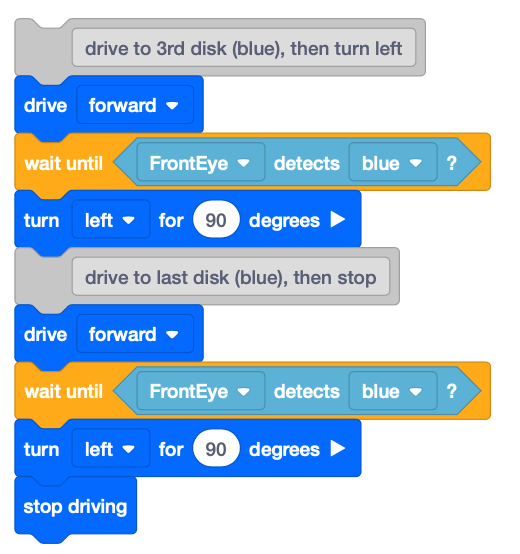
-
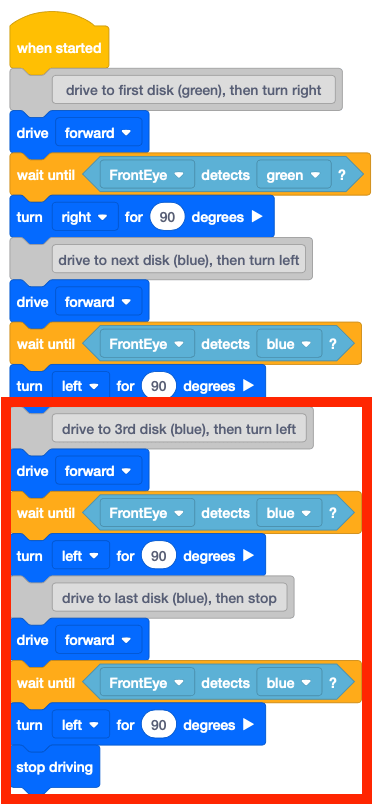
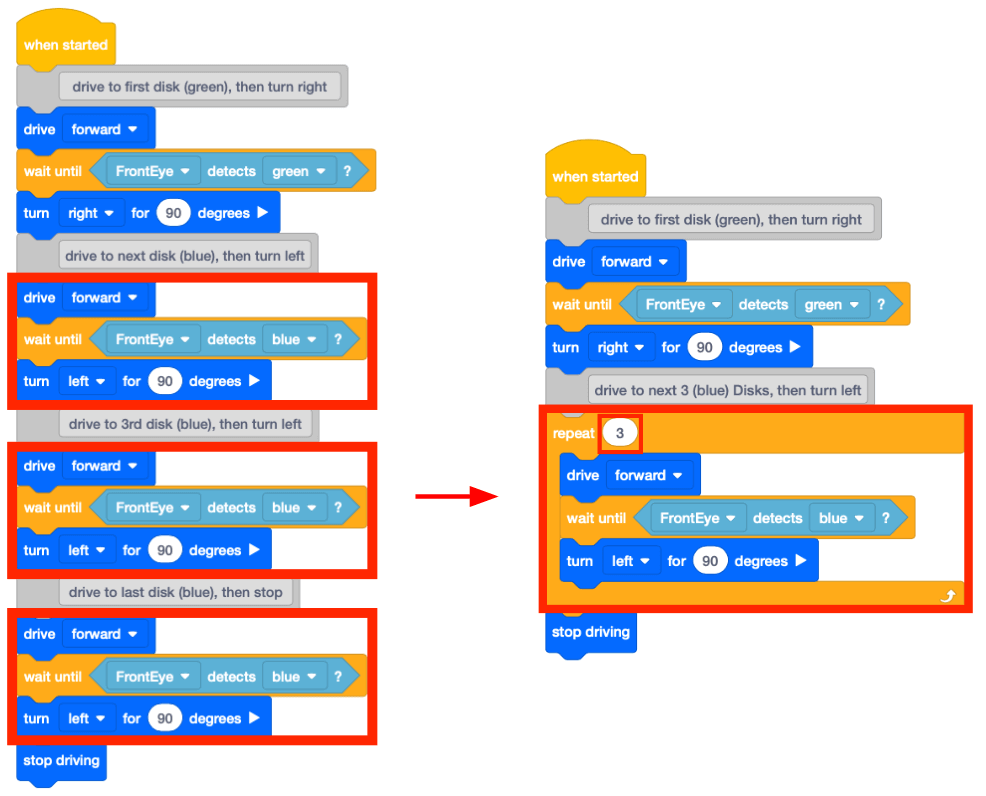
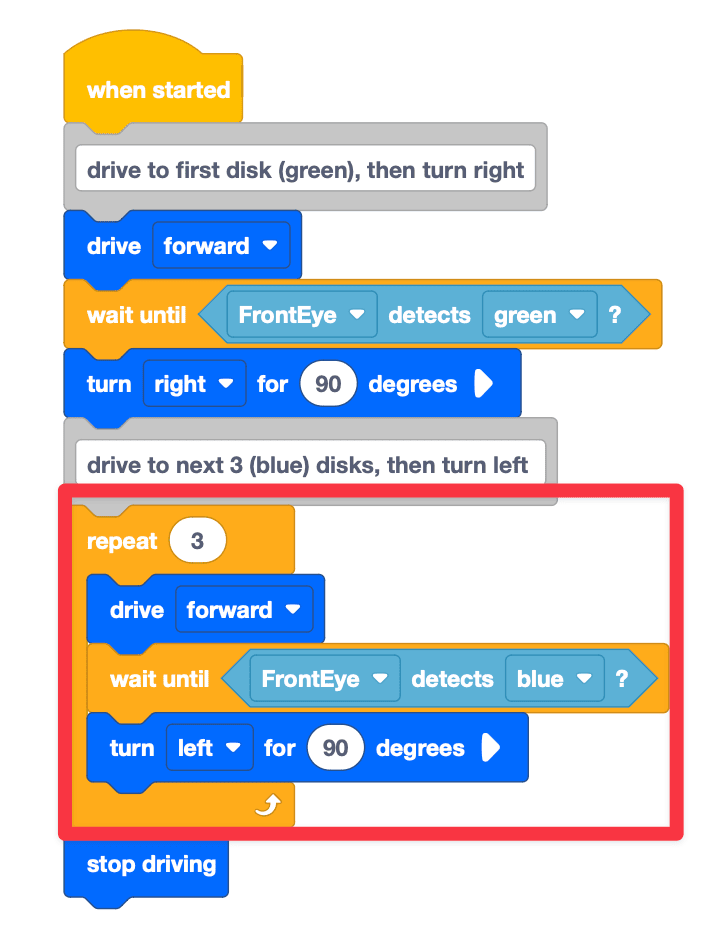
ध्यान दें कि इसमें एक पैटर्न है। इस परियोजना में ब्लॉकों की एक श्रृंखला तीन बार दोहराई गई है। कोड के इस भाग को [Repeat] ब्लॉक का उपयोग करके संक्षिप्त किया जा सकता है।
- यदि डिस्क मेज़ प्लेग्राउंड पहले खुला नहीं है तो उसे खोलें और प्रोजेक्ट चलाएँ।
-
वीआर रोबोट को भूलभुलैया खेल के मैदानपर चार डिस्क पर नेविगेट करते हुए देखें।

- इस परियोजना में, वीआर रोबोट तब तक आगे बढ़ता रहता है जब तक कि फ्रंट आई सेंसर हरे रंग का पता नहीं लगा लेता।
- वीआर रोबोट 90 डिग्री पर दाईं ओर मुड़ता है और तब तक आगे बढ़ता है जब तक कि नीला रंग दिखाई न दे।
- इसके बाद वीआर रोबोट बायीं ओर मुड़ता है और तब तक आगे बढ़ता है जब तक कि फ्रंट आई सेंसर नीले रंग का पता नहीं लगा लेता। एक बार नीला रंग पहचान में आ जाने पर, वीआर रोबोट पुनः बायीं ओर मुड़ जाता है।
- अंत में, वीआर रोबोट तब तक आगे बढ़ता रहता है जब तक कि फ्रंट आई सेंसर नीले रंग का पता नहीं लगा लेता, फिर रुक जाता है।
- इस पैटर्न पर ध्यान दें कि जब फ्रंट आई सेंसर हरे रंग का पता लगाता है, तो वीआर रोबोट दाईं ओर मुड़ जाता है। जब फ्रंट आई सेंसर नीले रंग का पता लगाता है, तो इस प्रोजेक्ट में वीआर रोबोट बाईं ओर मुड़ जाता है।
स्विच ब्लॉक का उपयोग करना
अब तक, आपने हरे डिस्क और फिर तीन नीले डिस्क पर ड्राइव करने के लिए एक प्रोजेक्ट बनाया है।
नीचे दी गई छवि VEXcode ब्लॉकों का उपयोग करते हुए संपूर्ण परियोजना को दर्शाती है, जिसमें दोहराए गए व्यवहारों का उपयोग लाल रंग में बॉक्स किए गए तीन नीले डिस्क तक ड्राइव करने के लिए किया जाता है।
नीचे दी गई परियोजना इन्हीं VEXcode ब्लॉकों को अनेक स्विच ब्लॉकों में परिवर्तित करके दिखाती है।
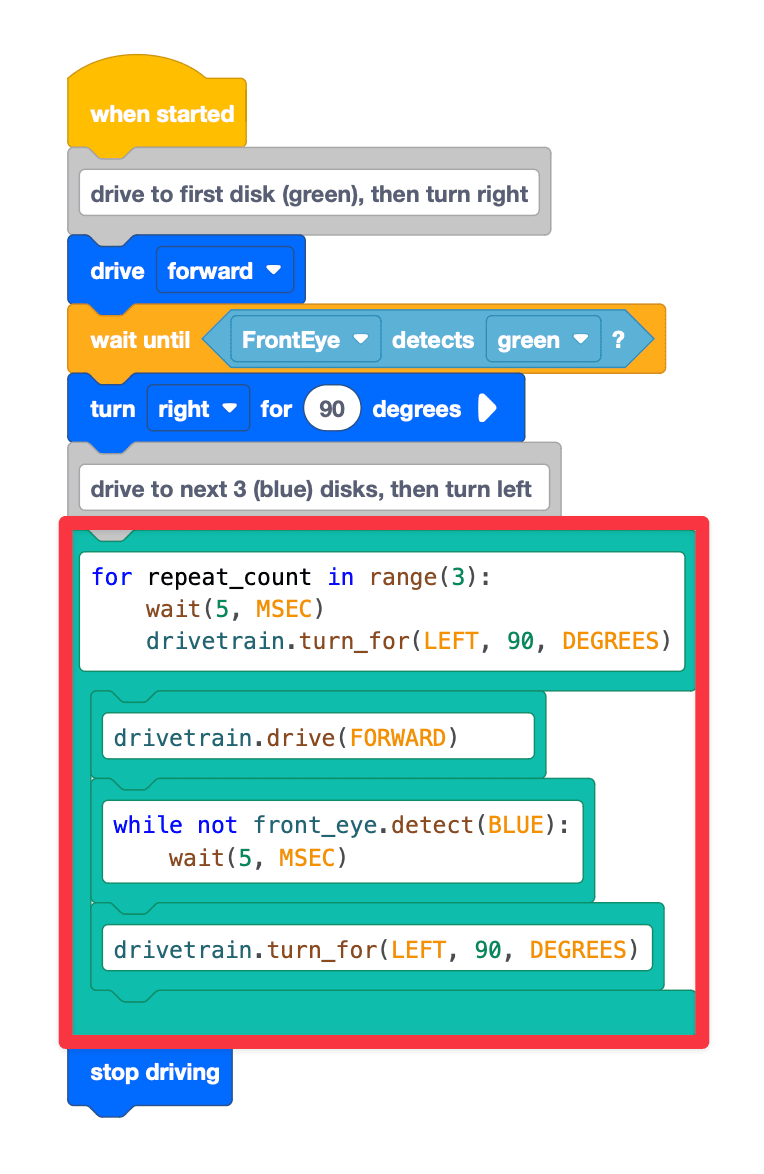
यह अंतिम परियोजना एक ही स्विच ब्लॉक के भीतर समान स्विच ब्लॉक कमांड को पायथन कमांड में परिवर्तित करके दिखाती है।
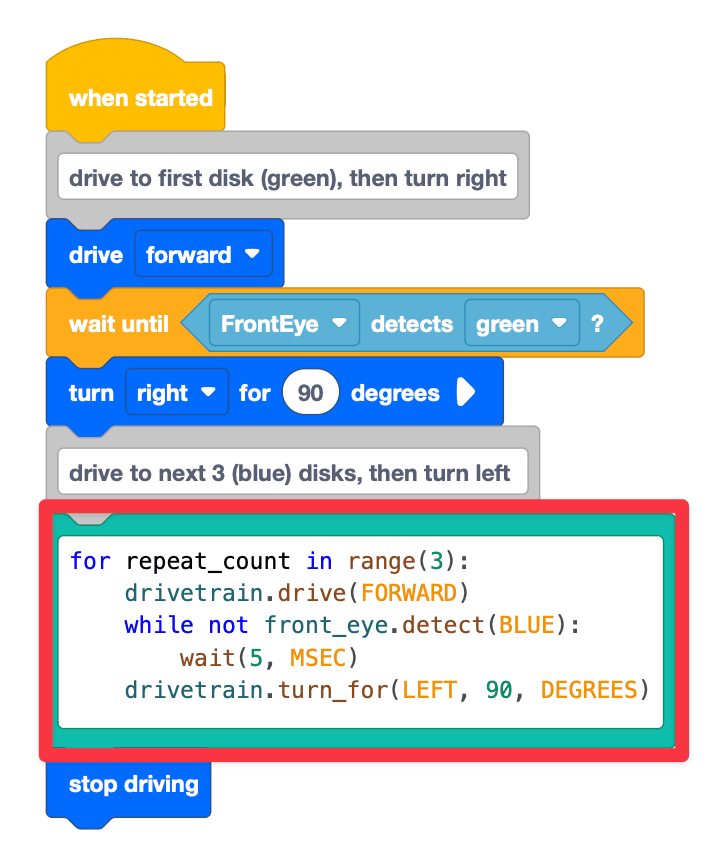
for repeat_count in range(3): वह पायथन कमांड है जो रोबोट को बताता है कि कोड की अगली इंडेंटेड पंक्तियों को तीन बार दोहराया जाना चाहिए। ध्यान दें कि आपको for loop के बाद एक कोलन (:) शामिल करना चाहिए।
कोड की आगामी पंक्तियाँ वे व्यवहार हैं जो दोहराए जाएंगे। ध्यान दें कि ये व्यवहार 4 स्पेस के डिफ़ॉल्ट इंडेंट पर हैं।
इसके अतिरिक्त, ध्यान दें कि सशर्त में कमांड, wait (5, MSEC)शामिल है। VEXcode VR में, wait कमांड हमेशा for loop के साथ जोड़ा जाता है। wait कमांड का उद्देश्य यह सुनिश्चित करना है कि VEXcode VR प्लेटफॉर्म की वेब-आधारित प्रकृति के कारण, VEXcode VR परियोजना को अपेक्षित रूप से ठीक से चला सके। फॉर लूप का उपयोग करते समय wait कमांड को कभी भी नहीं हटाया जाना चाहिए, अन्यथा आपका प्रोजेक्ट अपेक्षित रूप से नहीं चल पाएगा।
पंक्ति, wait (5, MSEC) while not front_eye.detect(BLUE) कमांड के नीचे इंडेंट किया गया है, क्योंकि फ्रंट आई सेंसर नीले रंग की जांच करेगा, प्रत्येक जांच के बीच 5 MSEC का विराम लेगा।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।