
Pelajaran 2: Berkendara ke Cakram Hijau lalu Biru
Berkendara ke Cakram Hijau lalu Biru
- Proyek sebelumnya membuat Robot VR berbelok ke kanan saat Sensor Mata Depan mendeteksi cakram hijau. Sekarang, buat proyek di mana Robot VR mengendalikan empat cakram di Disk Maze Playground.
-
Tujuannya adalah untuk menciptakan pola yang konsisten di mana Robot VR berbelok ke kanan saat Sensor Mata Depan mendeteksi cakram hijau, dan ke kiri saat Sensor Mata Depan mendeteksi cakram biru.

-
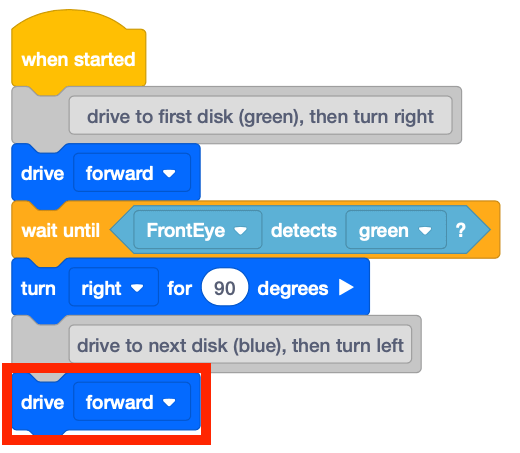
Tambahkan blok berikut ke proyek yang ada untuk menginstruksikan Robot VR untuk melaju maju setelah berbelok ke kanan.
-
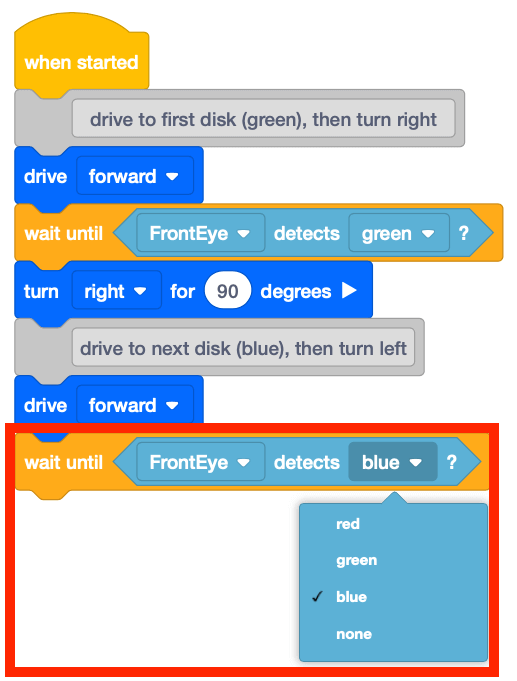
Tambahkan [Tunggu hingga] lainnya dengan blok <Color sensing> yang ditetapkan untuk mendeteksi 'biru,' karena disk berikutnya yang akan ditemui Robot VR berwarna biru.
-
Tambahkan blok [Belok ke] dan atur parameter ke 'kiri.'

-
Jalankan proyek untuk melihat bagaimana Robot VR bergerak melalui Disk Maze Playground.

- Perhatikan bahwa Robot VR berbelok ke kanan saat Sensor Mata Depan mendeteksi cakram hijau, dan berbelok ke kiri saat Sensor Mata Depan mendeteksi cakram biru.
-
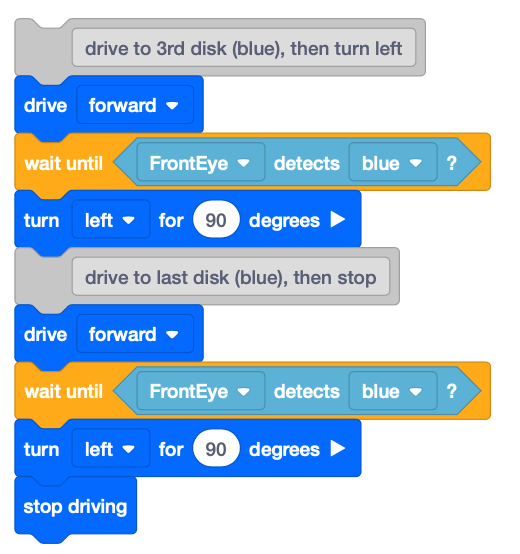
Lanjutkan membangun proyek ini untuk menggerakkan Robot VR ke dua disk lagi di Disk Maze Playground menggunakan Front Eye Sensor. Tambahkan blok berikut untuk menavigasi Robot VR ke dua Disk berikutnya lalu berhenti:
-
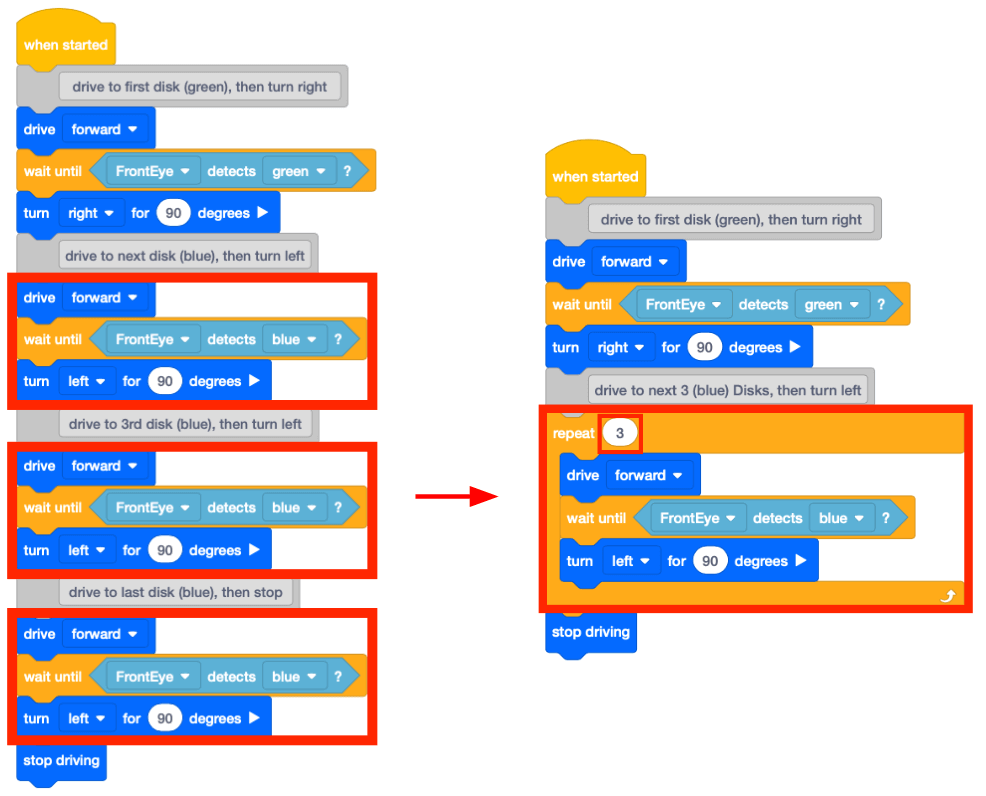
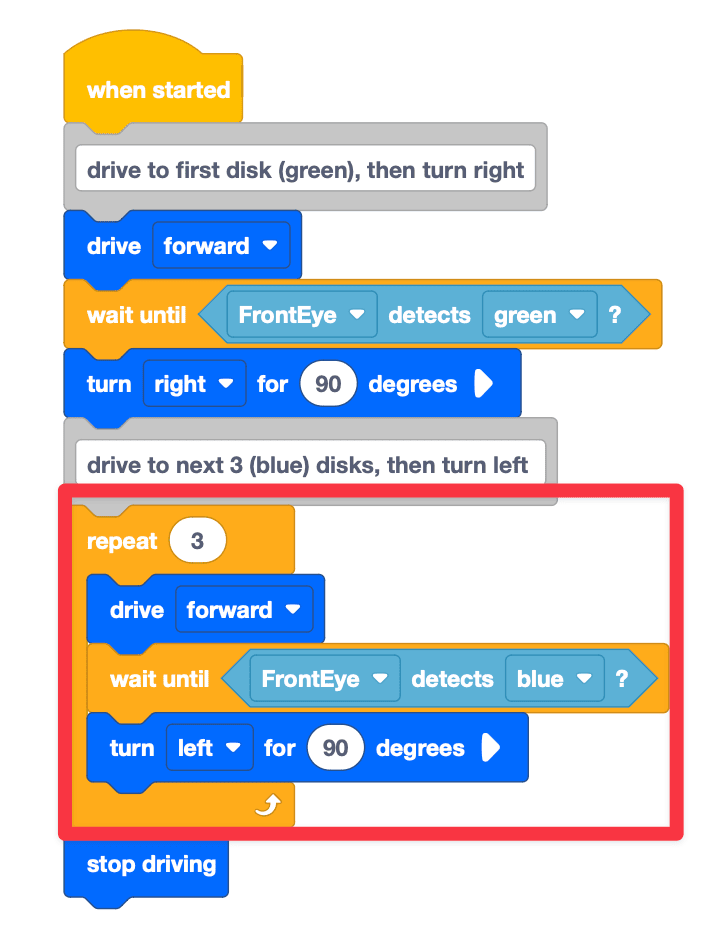
Perhatikan bahwa ada suatu pola. Ada serangkaian blok yang diulang tiga kali dalam proyek. Bagian kode ini dapat diringkas dengan menggunakan blok [Ulangi].
- Buka Disk Maze Playground jika belum terbuka, dan jalankan proyeknya.
-
Saksikan Robot VR menavigasi ke empat cakram di Disk Maze Playground.

- Dalam proyek ini, Robot VR bergerak maju hingga Sensor Mata Depan mendeteksi warna hijau.
- Robot VR berbelok ke kanan 90 derajat dan melaju ke depan lagi hingga warna biru terdeteksi.
- Robot VR kemudian berbelok ke kiri dan melaju ke depan hingga Sensor Mata Depan mendeteksi warna biru. Setelah warna biru terdeteksi, Robot VR berbelok ke kiri lagi.
- Terakhir, Robot VR bergerak maju hingga Sensor Mata Depan mendeteksi warna biru, lalu berhenti.
- Perhatikan pola ketika Sensor Mata Depan mendeteksi warna hijau, Robot VR berbelok ke kanan. Ketika Sensor Mata Depan mendeteksi warna biru, Robot VR berbelok ke kiri dalam proyek ini.
Menggunakan Blok Switch
Sejauh ini, Anda telah membuat proyek untuk mengarahkan ke disk hijau dan kemudian tiga Disk biru.
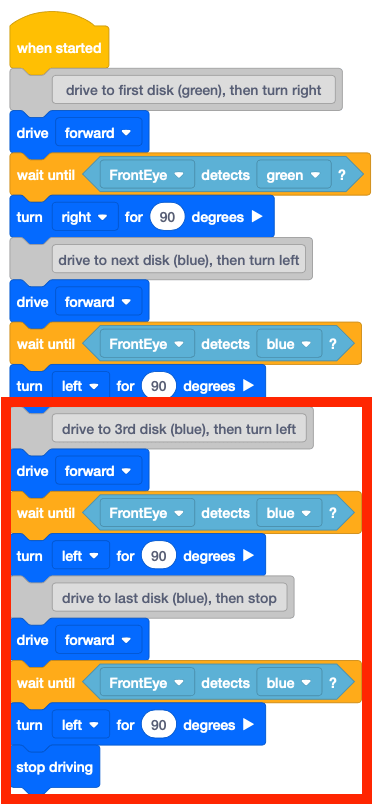
Gambar di bawah menunjukkan keseluruhan proyek menggunakan blok VEXcode, dengan perilaku berulang yang digunakan untuk mengarahkan ke tiga Disk biru yang dikotak dalam warna merah.
Proyek di bawah menunjukkan blok VEXcode yang sama diubah menjadi beberapa blok Switch.
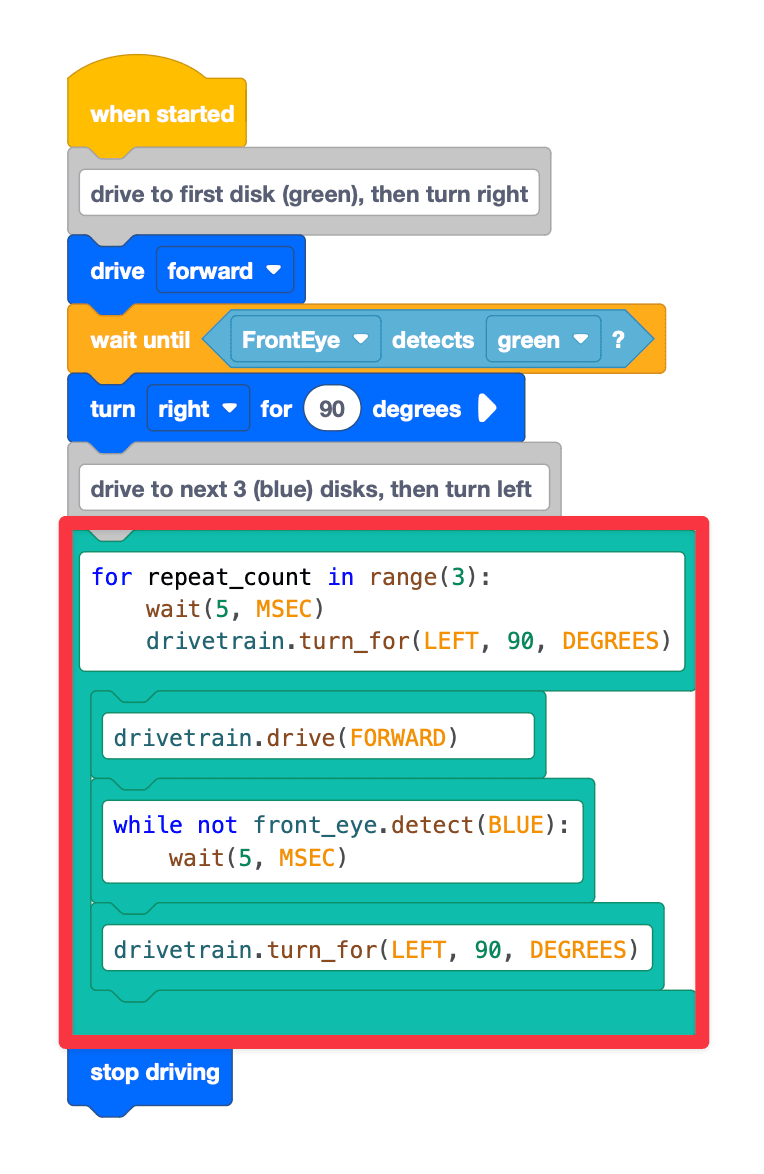
Proyek terakhir ini menunjukkan perintah blok Switch yang sama diubah menjadi perintah Python dalam satu blok Switch.
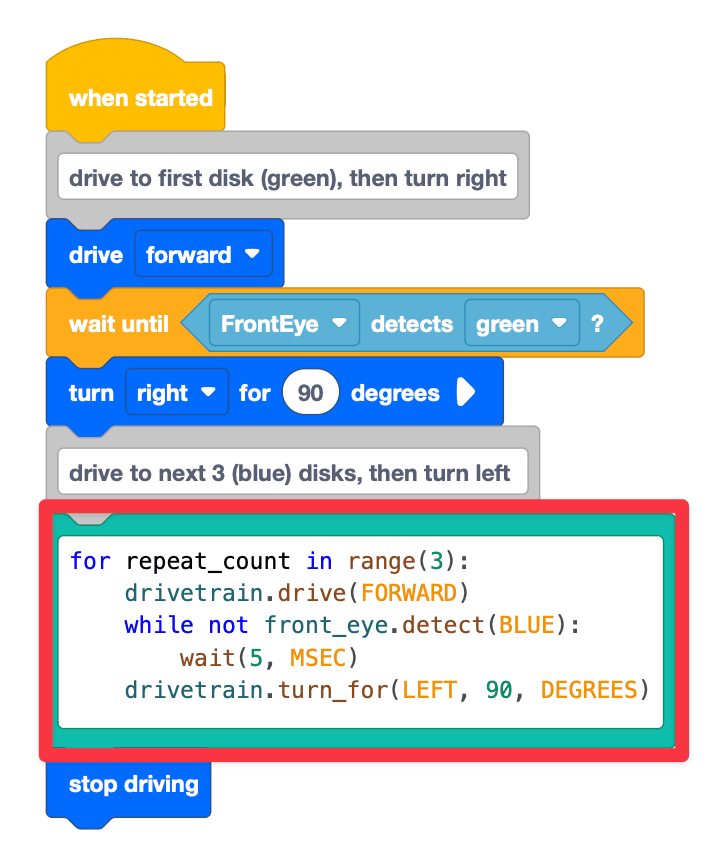
Angka untuk repeat_count dalam rentang(3): adalah perintah Python yang memberi tahu robot bahwa baris kode indentasi berikutnya harus diulang tiga kali. Perhatikan bahwa Anda harus menyertakan titik dua (:) setelah perulangan for.
Baris kode berikutnya adalah perilaku yang akan diulang. Perhatikan bahwa perilaku ini memiliki indentasi dengan default 4 spasi.
Selain itu, perhatikan bahwa kondisi tersebut menyertakan perintah, wait (5, MSEC). Dalam VEXcode VR, perintah wait selalu ditambahkan dengan for loop. Tujuan dari perintah wait adalah untuk memastikan bahwa VEXcode VR dapat menjalankan proyek sebagaimana mestinya, mengingat sifat platform VEXcode VR yang berbasis web. Perintah wait tidak boleh dihapus saat menggunakan for loop, atau proyek Anda mungkin tidak berjalan sebagaimana mestinya.
Baris wait (5, MSEC)diindentasi di bawah perintah while not front_eye.detect(BLUE) karena Front Eye Sensor akan memeriksa warna biru, menjeda 5 MSEC di antara setiap pemeriksaan.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.