
Bài 2: Lái xe đến đĩa xanh rồi đĩa xanh lam
Lái xe đến Đĩa Xanh rồi Đĩa Xanh
- Dự án trước đó có Robot VR rẽ phải khi Cảm biến mắt trước phát hiện đĩa màu xanh lá cây. Bây giờ, hãy xây dựng một dự án trong đó Robot VR di chuyển đến bốn đĩa trên Sân chơi mê cung đĩa .
-
Mục tiêu là tạo ra một mô hình nhất quán trong đó Robot VR rẽ phải khi Cảm biến mắt trước phát hiện đĩa màu xanh lá cây và rẽ trái khi Cảm biến mắt trước phát hiện đĩa màu xanh lam.

-
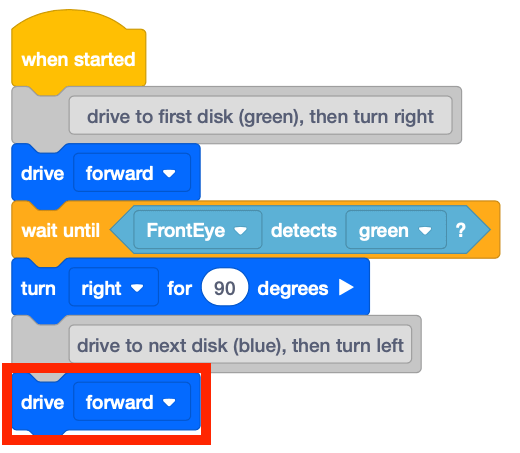
Thêm khối sau vào dự án hiện có để hướng dẫn Robot VR di chuyển về phía trước sau khi rẽ phải.
-
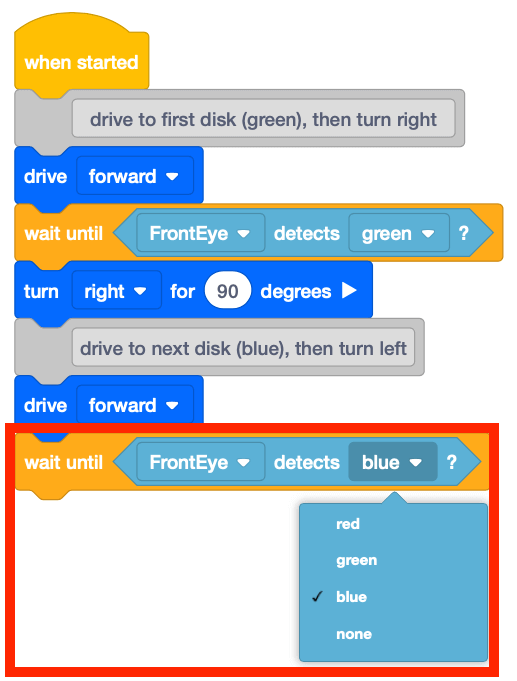
Thêm một [Chờ cho đến khi] nữa với khối <Color sensing> được đặt để phát hiện 'màu xanh', vì đĩa tiếp theo mà Robot VR sẽ gặp phải có màu xanh.
-
Thêm khối [Quay về] và đặt tham số thành 'trái'.

-
Chạy dự án để xem Robot VR di chuyển như thế nào qua Sân chơi mê cung đĩa .

- Lưu ý rằng Robot VR sẽ rẽ phải khi Cảm biến mắt trước phát hiện đĩa màu xanh lá cây và rẽ trái khi Cảm biến mắt trước phát hiện đĩa màu xanh lam.
-
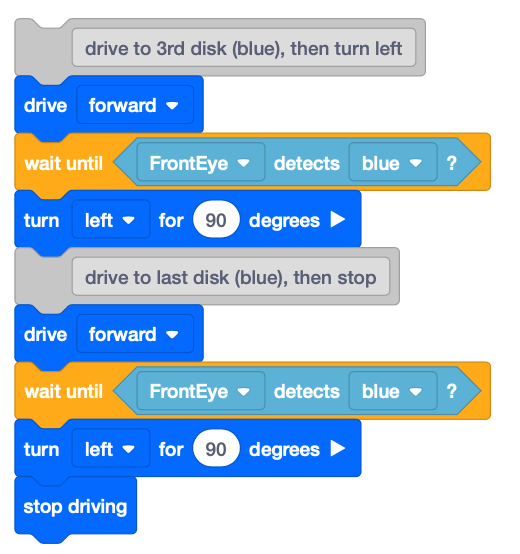
Tiếp tục xây dựng dự án này để điều khiển Robot VR đến hai đĩa nữa trên Sân chơi mê cung đĩa bằng cách sử dụng Cảm biến mắt trước. Thêm các khối sau để điều hướng Robot VR đến hai Đĩa tiếp theo rồi dừng lại:
-
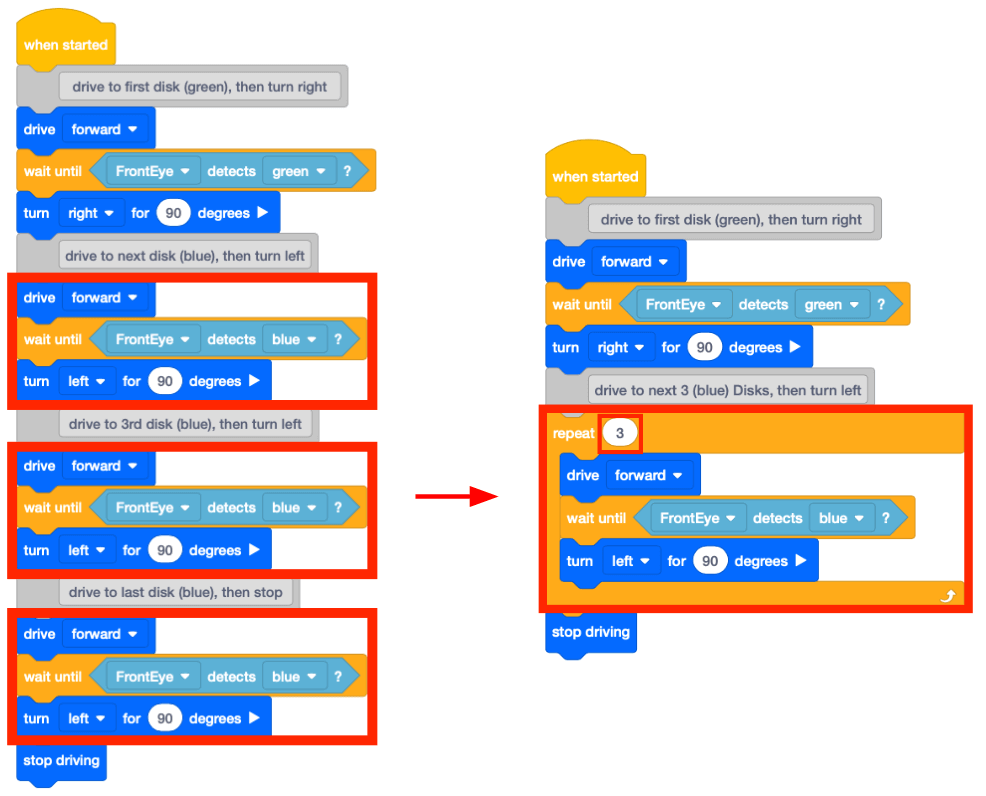
Lưu ý rằng có một mô hình. Có một loạt các khối được lặp lại ba lần trong dự án. Phần mã này có thể được rút gọn bằng cách sử dụng khối [Lặp lại].
- Mở Sân chơi mê cung đĩa nếu nó chưa được mở và chạy dự án.
-
Xem Robot VR di chuyển đến bốn đĩa trên Sân chơi mê cung đĩa .

- Trong dự án này, Robot VR sẽ di chuyển về phía trước cho đến khi Cảm biến mắt trước phát hiện màu xanh lá cây.
- Robot VR rẽ phải 90 độ và tiếp tục tiến về phía trước cho đến khi phát hiện màu xanh lam.
- Sau đó, VR Robot rẽ trái và tiến về phía trước cho đến khi Cảm biến mắt trước phát hiện màu xanh lam. Khi phát hiện màu xanh, Robot VR sẽ rẽ trái lần nữa.
- Cuối cùng, VR Robot sẽ di chuyển về phía trước cho đến khi Cảm biến mắt trước phát hiện màu xanh lam, sau đó dừng lại.
- Lưu ý rằng khi Cảm biến mắt trước phát hiện màu xanh lá cây, Robot VR sẽ rẽ phải. Trong dự án này, khi cảm biến mắt trước phát hiện màu xanh, Robot VR sẽ rẽ trái.
Sử dụng khối chuyển đổi
Cho đến nay, bạn đã tạo một dự án để lái đến đĩa màu xanh lá cây và sau đó là ba đĩa màu xanh lam.
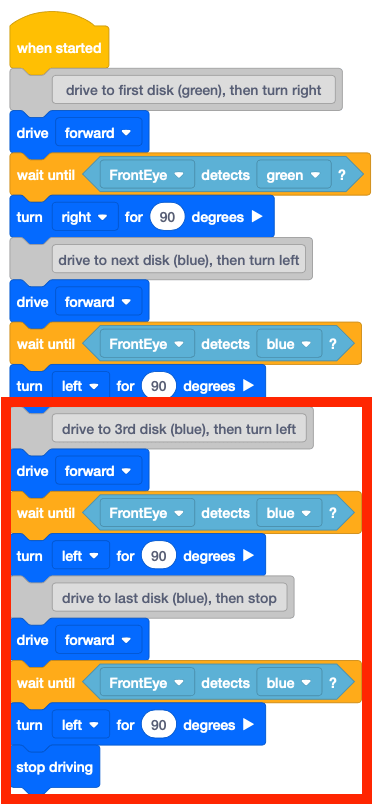
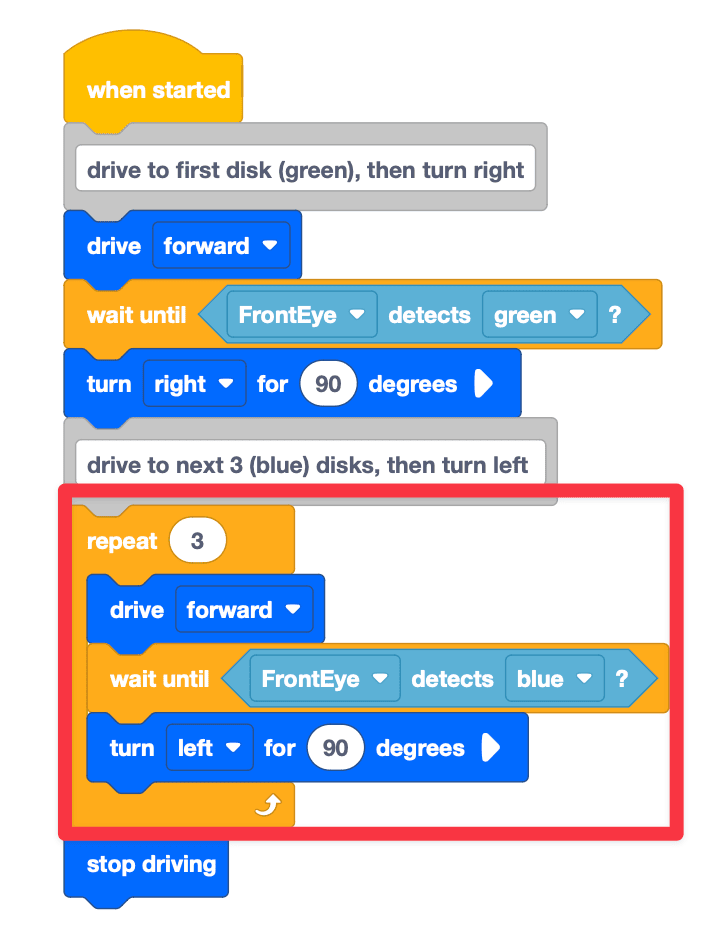
Hình ảnh bên dưới hiển thị toàn bộ dự án sử dụng các khối VEXcode, với các hành vi lặp lại được sử dụng để điều khiển đến ba đĩa màu xanh được đóng khung màu đỏ.
Dự án bên dưới hiển thị các khối VEXcode này được chuyển đổi thành nhiều khối Switch.
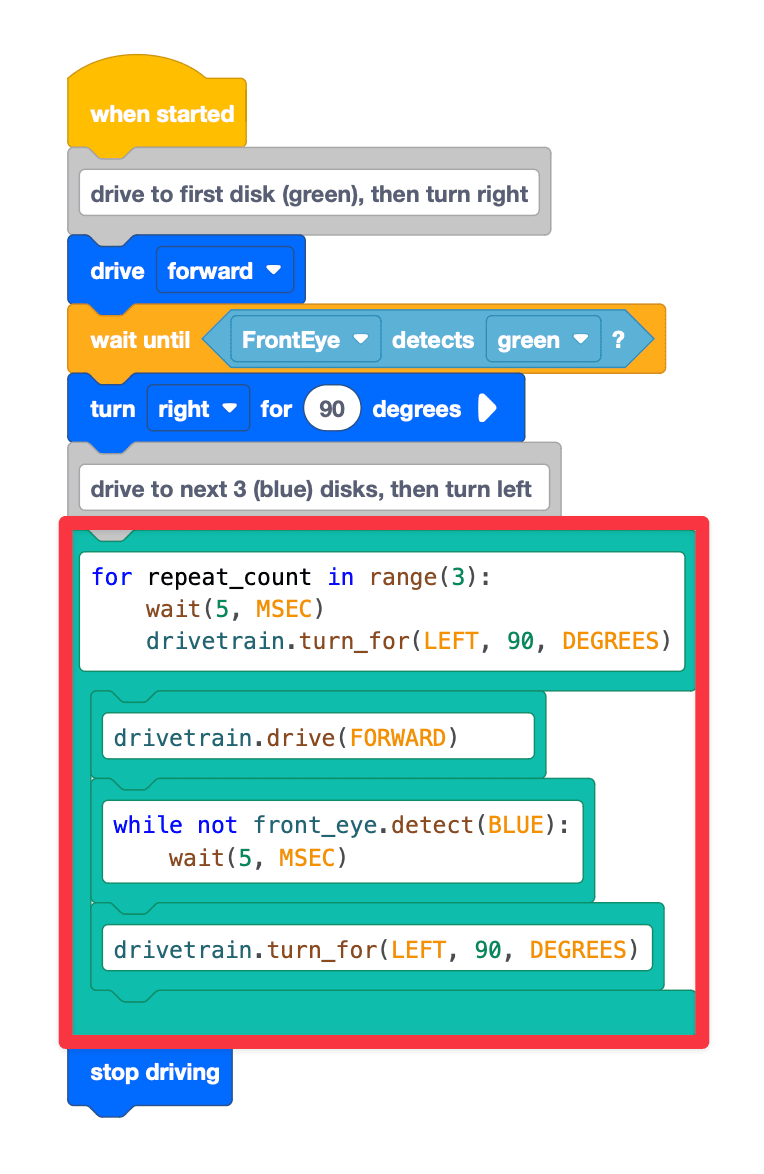
Dự án cuối cùng này hiển thị các lệnh khối Switch tương tự được chuyển đổi thành lệnh Python trong một khối Switch.
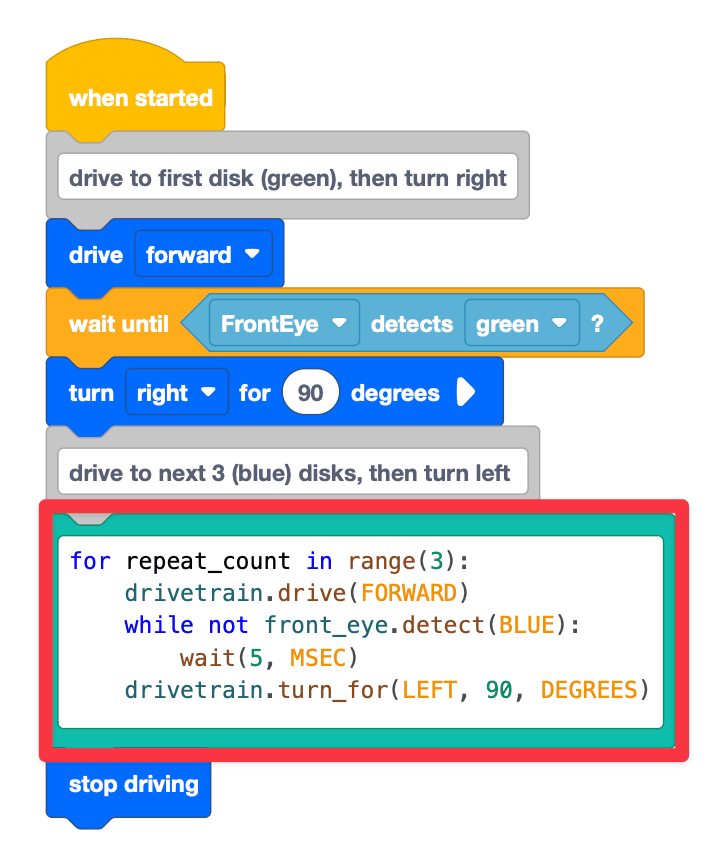
cho repeat_count trong range(3): là lệnh Python cho robot biết rằng các dòng mã thụt lề tiếp theo phải được lặp lại ba lần. Lưu ý rằng bạn phải thêm dấu hai chấm (:) sau vòng lặp for.
Các dòng mã tiếp theo là những hành vi sẽ được lặp lại. Lưu ý rằng các hành vi này được thụt lề theo mặc định là 4 khoảng trắng.
Ngoài ra, lưu ý rằng điều kiện bao gồm lệnh wait (5, MSEC). Trong VEXcode VR, lệnh wait luôn được thêm vào vòng lặp for. Mục đích của lệnh wait là để đảm bảo VEXcode VR có thể chạy dự án đúng như mong muốn, do nền tảng VEXcode VR là nền tảng dựa trên web. Không bao giờ nên xóa lệnh wait khi sử dụng vòng lặp for, nếu không dự án của bạn có thể không chạy như mong đợi.
Dòng wait (5, MSEC)được thụt vào bên dưới lệnh while not front_eye.detect(BLUE) vì Cảm biến mắt trước sẽ kiểm tra màu xanh lam, tạm dừng 5 MSEC giữa mỗi lần kiểm tra.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.