
Lección 2: Conducir a discos verdes y luego azules
Conducir a discos verdes y luego azules
- En el proyecto anterior, el robot VR gira a la derecha cuando el sensor del ojo frontal detecta un disco verde. Ahora, cree un proyecto en el que el robot VR se dirija a cuatro discos en el Disk Maze Playground.
-
El objetivo es crear un patrón consistente en el que el robot VR gire a la derecha cuando el sensor de ojo frontal detecte un disco verde y a la izquierda cuando el sensor de ojo frontal detecte un disco azul.

-
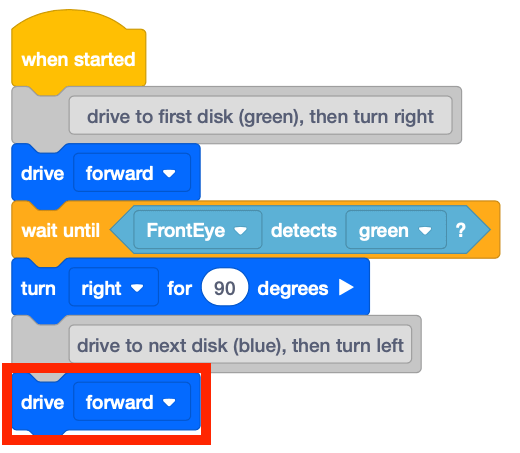
Añada el siguiente bloque al proyecto existente para indicarle al robot de realidad virtual que avance después de girar a la derecha.
-
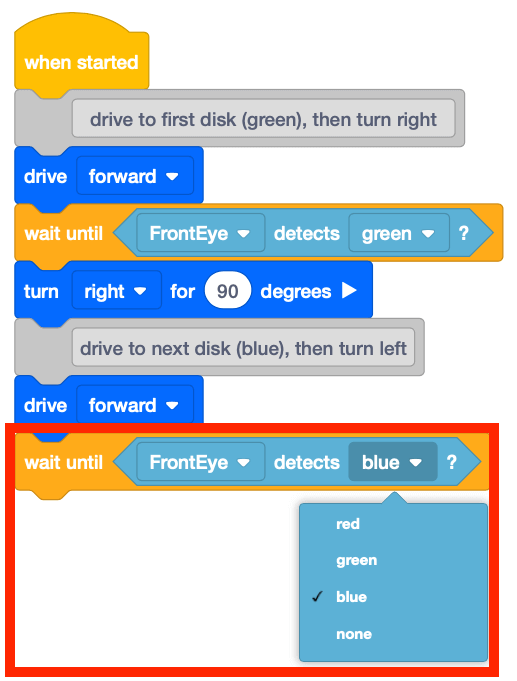
Agregue otro [Espere hasta] con el <Color sensing> bloque configurado para detectar ‘azul’, ya que el siguiente disco que encontrará el Robot VR es azul.
-
Añada un bloque [Turn for] y establezca el parámetro en 'left'.

-
Ejecuta el proyecto para ver cómo se mueve el robot de realidad virtual a través del patio de juegos del laberinto de discos.

- Observe que el robot VR gira a la derecha cuando el sensor del ojo delantero detecta un disco verde y gira a la izquierda cuando el sensor del ojo delantero detecta un disco azul.
-
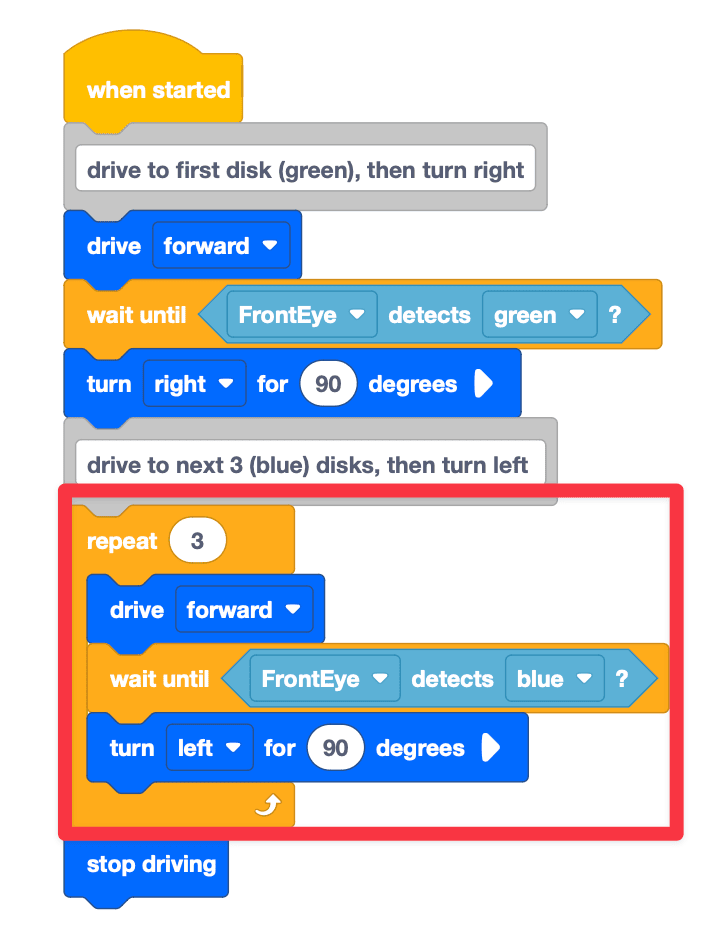
Continúe construyendo este proyecto para conducir el Robot VR a dos discos más en el Disk Maze Playground utilizando el Sensor de Ojo Delantero. Añada los siguientes bloques para navegar por el Robot VR a los siguientes dos Discos y luego deténgase:


-
Observa que hay un patrón. Hay una serie de bloques que se repiten tres veces en el proyecto. Esta sección del código se puede condensar utilizando un bloque [Repeat].

- Abra el Disk Maze Playground si aún no está abierto y ejecute el proyecto.
-
Observa cómo el robot VR navega a cuatro discos en el Disk Maze Playground.

- En este proyecto, el robot VR avanza hasta que el sensor del ojo frontal detecta el color verde.
- El robot VR gira a la derecha 90 grados y vuelve a avanzar hasta que se detecta el color azul.
- El robot VR gira a la izquierda y avanza hasta que el sensor del ojo delantero detecta azul. Una vez que se detecta el color azul, el robot VR vuelve a girar a la izquierda.
- Finalmente, el robot VR avanza hasta que el sensor del ojo frontal detecta azul y luego se detiene.
- Observe el patrón que cuando el sensor del ojo delantero detecta verde, el robot VR gira a la derecha. Cuando el sensor del ojo frontal detecta azul, el robot VR gira a la izquierda en este proyecto.
Uso de bloques de interruptores
Hasta ahora, ha creado un proyecto para conducir al disco verde y luego a los tres discos azules.
La siguiente imagen muestra todo el proyecto utilizando bloques VEXcode, con los comportamientos repetidos utilizados para conducir a los tres discos azules en rojo.
El siguiente proyecto muestra estos mismos bloques de VEXcode convertidos en múltiples bloques de Switch.
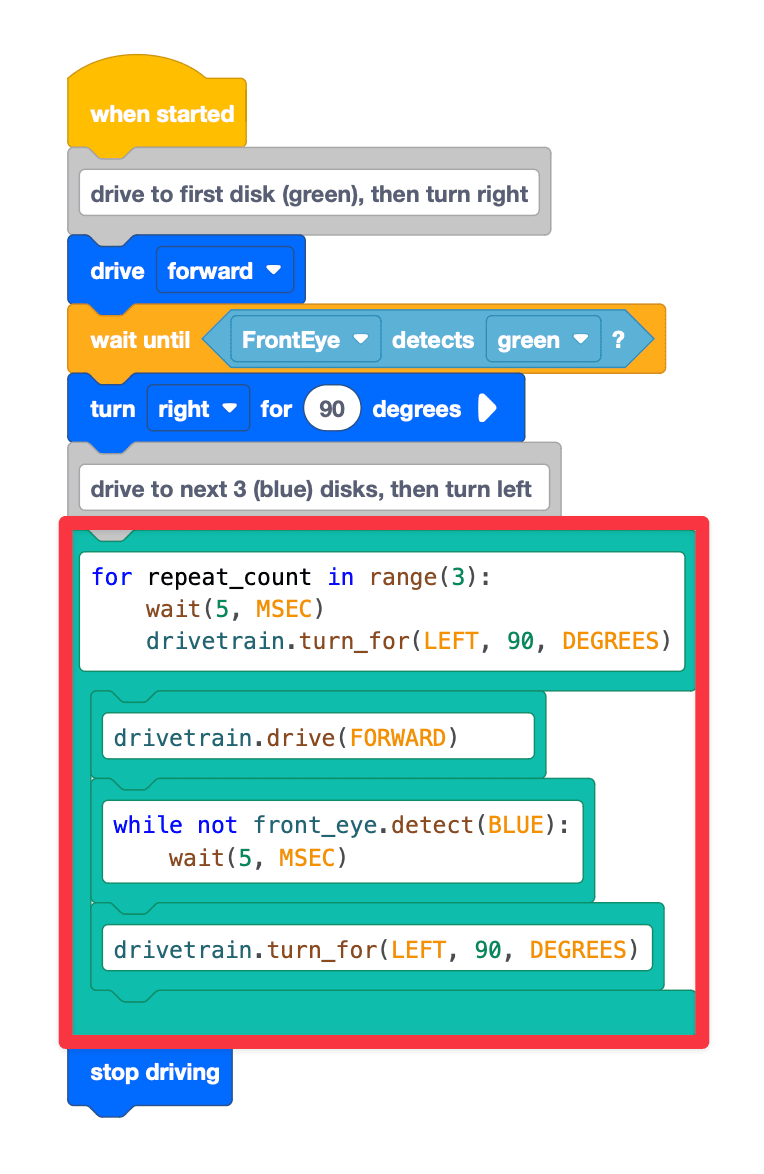
Este último proyecto muestra los mismos comandos de bloque de Switch convertidos en comandos de Python dentro de un bloque de Switch.
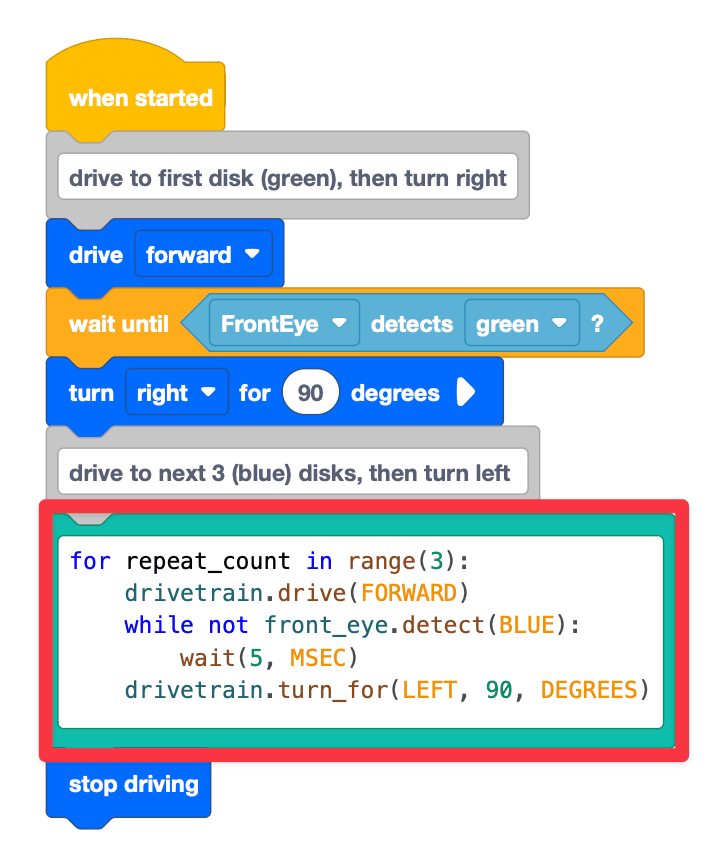
El for repeat_count en el rango(3): es el comando de Python que le dice al robot que las siguientes líneas de código con sangría deben repetirse tres veces. Tenga en cuenta que debe incluir dos puntos (:) después del bucle for.
Las siguientes líneas de código son los comportamientos que se repetirán. Tenga en cuenta que estos comportamientos tienen sangría en un valor predeterminado de 4 espacios.
Además, tenga en cuenta que el condicional incluye el comando wait (5, MSEC) En VEXcode VR, un comando wait siempre se agrega con el bucle for. El propósito del comando wait es garantizar que VEXcode VR pueda ejecutar correctamente el proyecto según lo previsto, debido a la naturaleza basada en web de la plataforma VEXcode VR. El comando wait nunca debe eliminarse cuando se utiliza un bucle for, o su proyecto podría no ejecutarse como se espera.
La línea, wait (5, MSEC) está sangrada debajo del comando while not front_eye.detect(BLUE) porque el sensor ocular frontal verificará el color azul, deteniéndose 5 MSEC entre cada verificación.
Seleccione el botón Siguiente para continuar con el resto de esta lección.