
الدرس 3: قيم مستشعر المراقبة
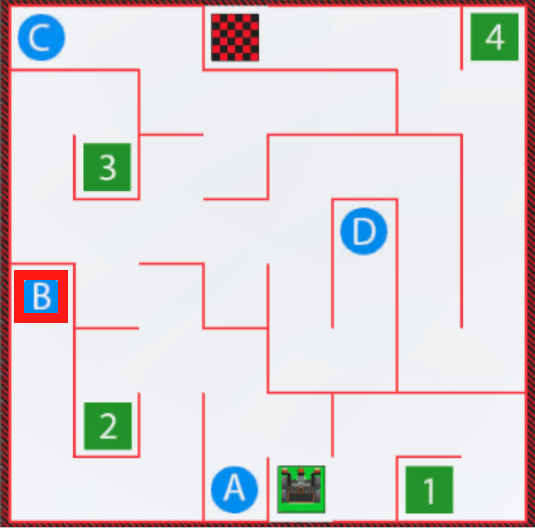
في الدرس السابق، استخدمت مستشعر المسافة وكتل المقارنة لروبوت الواقع الافتراضي للقيادة من البداية إلى الرقم "1" على ملعب المتاهة الجدارية. في هذا الدرس، ستتعلم كيفية مراقبة القيم من أجهزة الاستشعار في وحدة التحكم في الشاشة، ومحرك روبوت الواقع الافتراضي من البداية إلى الحرف "B" على ملعب المتاهة الجدارية.

مخرجات التعلم
- حدد أنه يمكن مراقبة قيمة مستشعر المسافة عن طريق تحديد وسحب كتلة <Distance found object> أو (المسافة من) إلى رمز وحدة التحكم في الشاشة في مساحة العمل.
- صف فائدة القدرة على مراقبة قيم المستشعر عند إنشاء مشاريع VEXcode VR.
بدء مشروع جديد
-
ابدأ مشروعًا جديدًا في VEXcode VR واسم المشروع Unit5Lesson3.

القيادة إلى الحرف "ب"
-
سيبني هذا الدرس مشروعًا لروبوت الواقع الافتراضي للقيادة إلى الحرف "B" على ملعب المتاهة الجدارية باستخدام مستشعر المسافة.
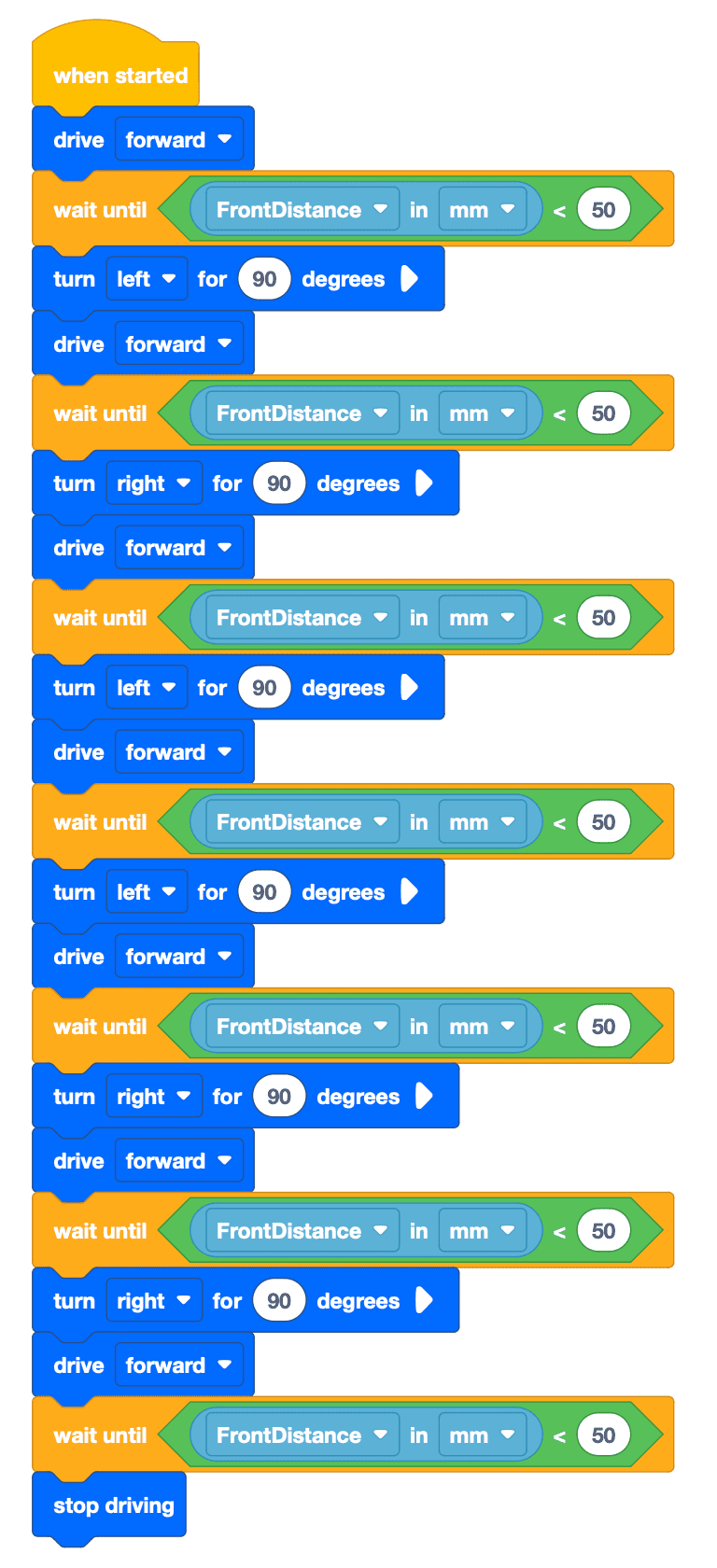
- قم ببناء مشروع VEXcode VR التالي باستخدام كتل VEXcode أو كتل Switch أو مزيج من كلا النوعين. الهدف من
هذا الدرس هو الانتقال إلى الحرف "B"، ولكن المشروع التالي به خطأ.
- قم بتشغيل ملعب المتاهة الجدارية إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع.
- لاحظ أن روبوت الواقع الافتراضي لا يصل إلى الحرف "ب". لم لا ؟ قم بتشغيل
المشروع مرة أخرى لتحديد الخطأ.
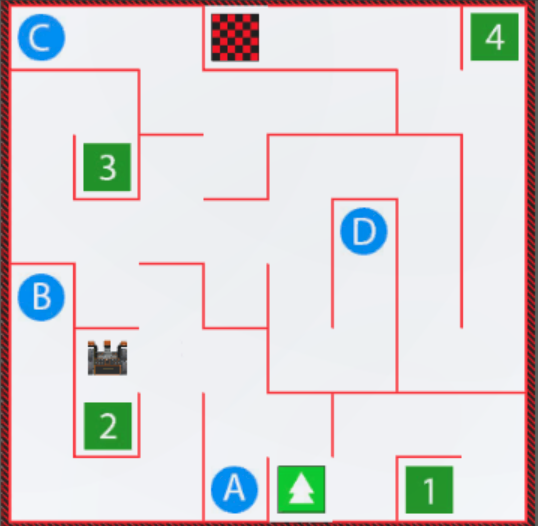
- عندما يصل روبوت الواقع الافتراضي إلى هذه النقطة في متاهة الحائط، يحتاج روبوت الواقع الافتراضي إلى الانعطاف يسارًا للوصول إلى الحرف "ب". في هذا المنعطف، يكون روبوت الواقع الافتراضي بعيدًا عن الحائط أكثر من المنعطفات الأخرى. يمكن استخدام مستشعر المسافة للسماح لروبوت الواقع الافتراضي بالانعطاف على أي مسافة بعيدًا عن الحائط.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.