
Lição 3: Monitorização dos valores dos sensores
Na lição anterior, você usou o sensor de distância e os blocos de comparação para o robô VR dirigir do início ao número ‘1’ no Wall Maze Playground. Nesta lição, você aprenderá a monitorar os valores dos sensores no console do monitor e fazer com que o robô VR dirija do início até a letra ‘B’ no Wall Maze Playground.

Resultados de Aprendizagem
- Identifique que o valor do Sensor de Distância pode ser monitorado selecionando e arrastando o bloco <Distance found object> ou (Distância de) para o ícone do Console do Monitor no Espaço de Trabalho.
- Descreva o benefício de poder monitorar os valores dos sensores ao criar projetos VEXcode VR.
Iniciar um Novo Projecto
-
Inicie um novo projeto no VEXcode VR e nomeie o projeto Unit5Lesson3.

Dirija-se à letra ‘B’
-
Esta lição criará um projeto para o robô VR dirigir com a letra ‘B’ no Wall Maze Playground usando o sensor de distância.
- Crie o seguinte projeto VEXcode VR usando blocos VEXcode, blocos Switch ou uma combinação de ambos os tipos. O objetivo desta lição é levar à letra ‘B‘, mas o projeto a seguir tem um erro.

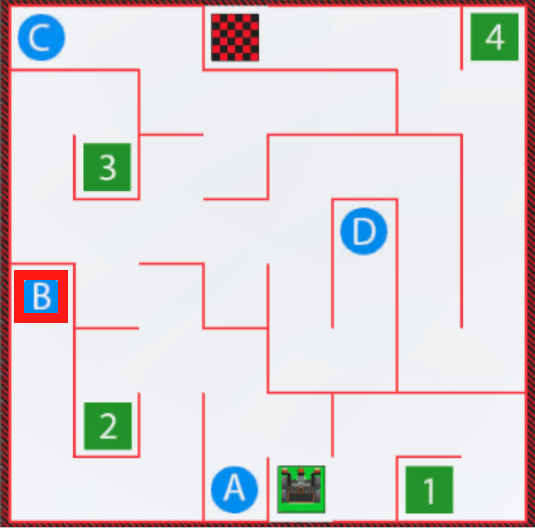
- Inicie o Wall Maze Playground, se ainda não estiver aberto, e execute o projeto.
- Observe que o robô VR NÃO atinge a letra ‘B.’ Por que não? Execute o projeto novamente para identificar o erro.
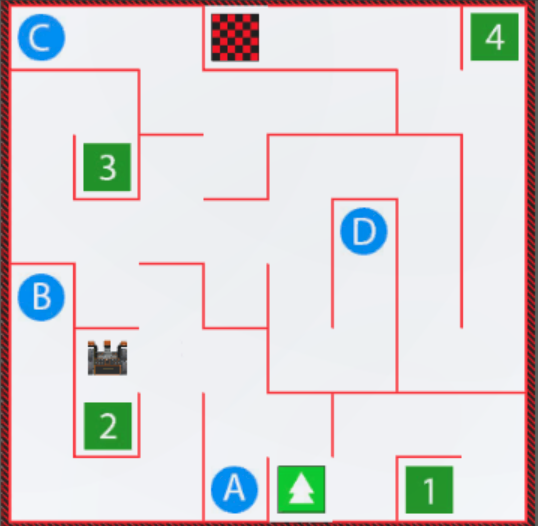
- Quando o Robô VR atinge este ponto no Labirinto da Parede, o Robô VR precisa virar à esquerda para alcançar a letra ‘B.’ Nesta curva, o Robô VR está mais longe da parede do que em outras curvas. O Sensor de Distância pode ser usado para permitir que o Robô VR faça curvas a qualquer distância de uma parede.
Selecione o botão Seguinte para continuar com o resto desta lição.