
Lezione 3: Monitoraggio dei valori dei sensori
Nella lezione precedente, hai utilizzato il sensore di distanza e i blocchi di confronto per il robot VR per guidare dall'inizio al numero "1" sul parco giochi del labirinto a parete. In questa lezione, imparerai come monitorare i valori dai sensori nella console del monitor e far guidare il robot VR dall'inizio alla lettera "B" sul parco giochi del labirinto a parete.

Risultati di apprendimento
- Identificare che il valore del sensore di distanza può essere monitorato selezionando e trascinando il blocco <Distance found object> o (Distanza da) sull'icona Console monitor nell'area di lavoro.
- Descrivere il vantaggio di poter monitorare i valori dei sensori durante la creazione di progetti VEXcode VR.
Inizia un nuovo progetto
-
Avviare un nuovo progetto in VEXcode VR e denominare il progetto Unit5Lesson3.

Guida fino alla lettera "B"
-
Questa lezione costruirà un progetto per il robot VR da guidare fino alla lettera "B" sul parco giochi del labirinto a parete utilizzando il sensore di distanza.
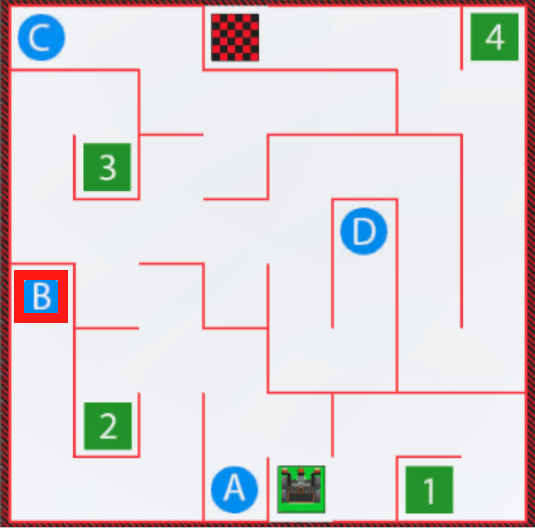
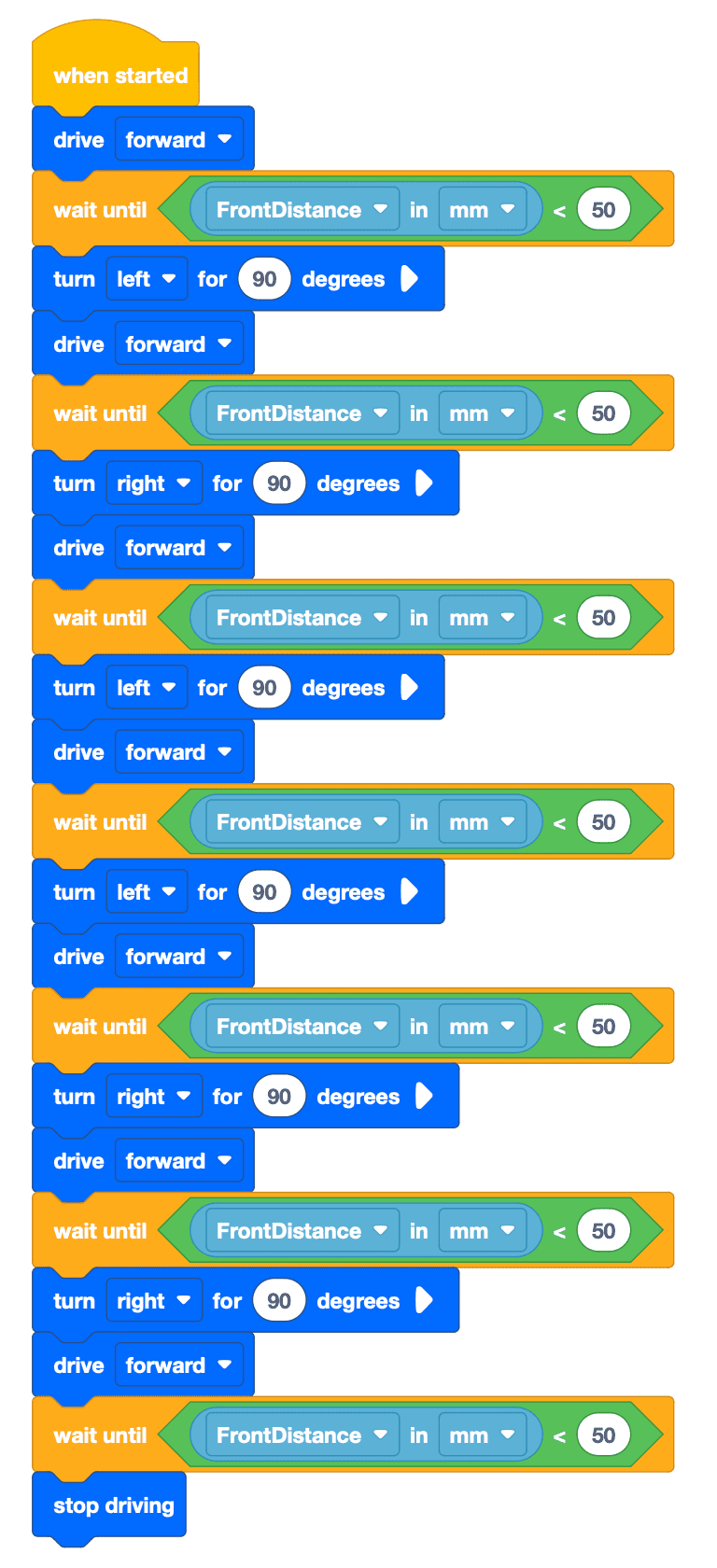
- Creare il seguente progetto VEXcode VR utilizzando blocchi VEXcode, blocchi Switch o una combinazione di entrambi i tipi. L'obiettivo di questa lezione è arrivare alla lettera "B", ma il seguente progetto ha un errore.
- Avviare il Wall Maze Playground se non è già aperto ed eseguire il progetto.
- Si noti che il robot VR NON raggiunge la lettera "B". Perché no? Eseguire nuovamente il progetto per identificare l'errore.
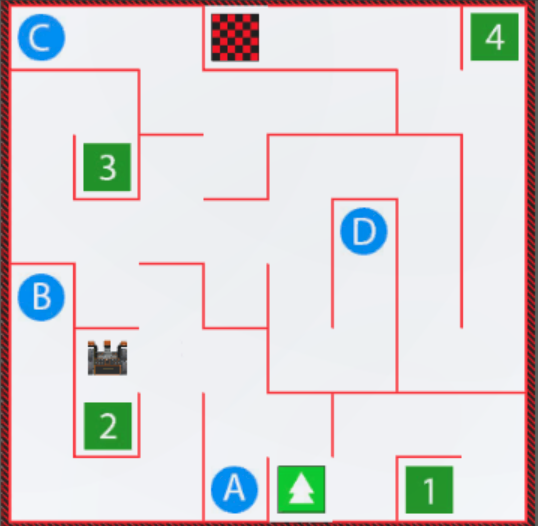
- Quando il robot VR raggiunge questo punto nel labirinto a muro, il robot VR deve girare a sinistra per raggiungere la lettera "B". In questa curva, il robot VR è più lontano dalla parete rispetto alle altre curve. Il sensore di distanza può essere utilizzato per consentire al robot VR di girare a qualsiasi distanza da una parete.
Selezionare il pulsante Avanti per continuare con il resto della lezione.