
Bài 3: Giám sát giá trị cảm biến
Trong Bài học trước, bạn đã sử dụng Cảm biến khoảng cách và các khối so sánh để Robot VR di chuyển từ điểm bắt đầu đến số '1' trên Sân chơi mê cung tường số. Trong Bài học này, bạn sẽ học cách theo dõi các giá trị từ cảm biến trong Bảng điều khiển màn hình và điều khiển Robot VR lái từ đầu đến chữ 'B' trên Sân chơi mê cung tường .

Kết quả học tập
- Xác định giá trị của Cảm biến khoảng cách có thể được theo dõi bằng cách chọn và kéo khối <Distance found object> hoặc (Khoảng cách từ) vào biểu tượng Bảng điều khiển giám sát trong Không gian làm việc.
- Mô tả lợi ích của việc có thể theo dõi giá trị cảm biến khi tạo dự án VEXcode VR.
Bắt đầu một dự án mới
-
Bắt đầu một dự án mới trong VEXcode VR và đặt tên cho dự án Unit5Lesson3.

Lái xe đến chữ 'B'
-
Bài học này sẽ xây dựng một dự án để Robot VR di chuyển đến chữ 'B' trên Sân chơi mê cung tường số bằng cách sử dụng Cảm biến khoảng cách.
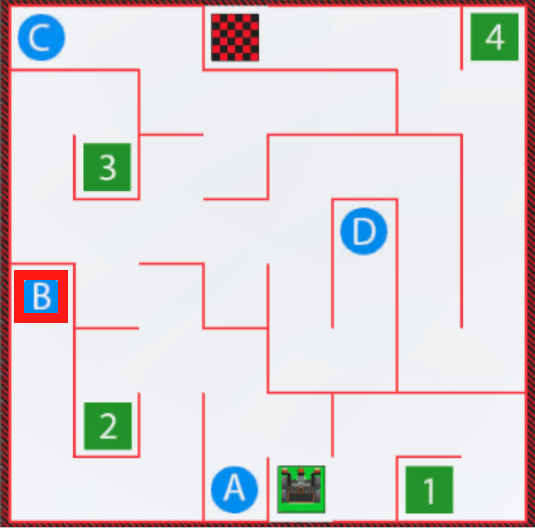
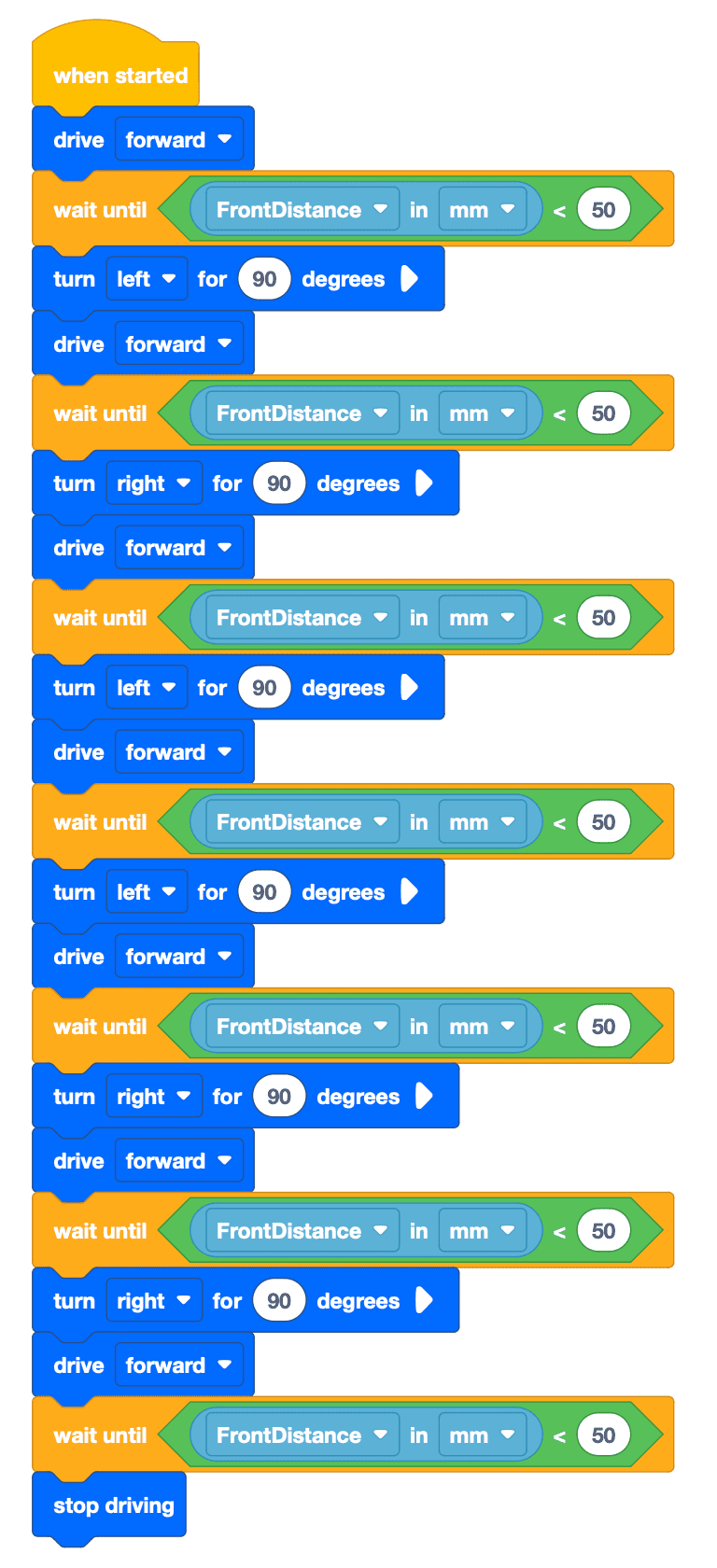
- Xây dựng dự án VEXcode VR sau bằng cách sử dụng các khối VEXcode, khối Switch hoặc kết hợp cả hai loại. Mục tiêu của bài học này là lái xe đến chữ 'B', nhưng dự án sau đây có lỗi.
- Khởi chạy Sân chơi mê cung tường nếu nó chưa mở và chạy dự án.
- Lưu ý rằng Robot VRtới chữ 'B'. Tại sao không? Chạy lại dự án để xác định lỗi.
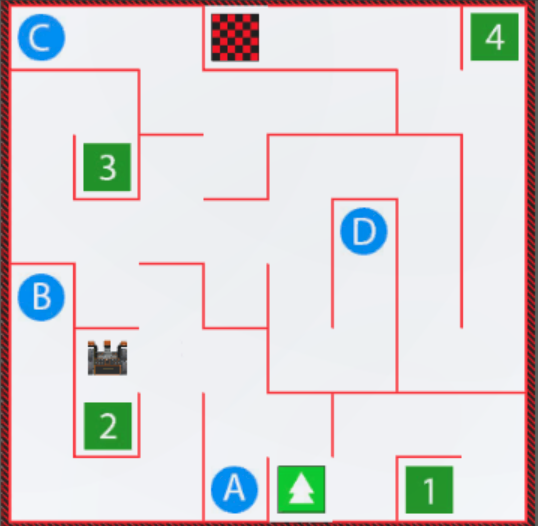
- Khi VR Robot đến điểm này trong Mê cung tường, VR Robot cần rẽ trái để đến chữ 'B'. Ở lượt này, Robot VR sẽ ở xa bức tường hơn so với các lượt khác. Cảm biến khoảng cách có thể được sử dụng để cho phép Robot VR rẽ ở bất kỳ khoảng cách nào so với tường.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.