
บทที่ 3: การตรวจสอบค่าเซ็นเซอร์
ในบทเรียนก่อนหน้านี้คุณใช้เซ็นเซอร์ระยะทางและบล็อกเปรียบเทียบสำหรับหุ่นยนต์ VR เพื่อขับจากจุดเริ่มต้นไปยังหมายเลข ‘1’ บน Wall MazePlayground ในบทเรียนนี้คุณจะได้เรียนรู้วิธีตรวจสอบค่าจากเซ็นเซอร์ในคอนโซลมอนิเตอร์และให้หุ่นยนต์ VR ขับจากจุดเริ่มต้นไปยังตัวอักษร ‘B’ บน Wall MazePlayground

ผลการเรียนรู้
- ระบุว่าสามารถตรวจสอบค่าของเซ็นเซอร์ระยะทางได้โดยการเลือกและลากบล็อก <Distance found object> หรือ (ระยะทางจาก) ไปยังไอคอนคอนคอนโซลหน้าจอภาพในพื้นที่ทำงาน
- อธิบายประโยชน์ของความสามารถในการตรวจสอบค่าเซ็นเซอร์เมื่อสร้างโครงการ VEXcode VR
เริ่มโปรเจกต์ใหม่
-
เริ่มโครงการใหม่ใน VEXcode VR และตั้งชื่อ โครงการUnit5Lesson3

ขับไปที่ตัวอักษร ‘B’
-
บทเรียนนี้จะสร้างโครงการสำหรับหุ่นยนต์ VR เพื่อขับไปยังตัวอักษร ‘B’ บน Wall Maze Playground โดยใช้เซ็นเซอร์ระยะทาง
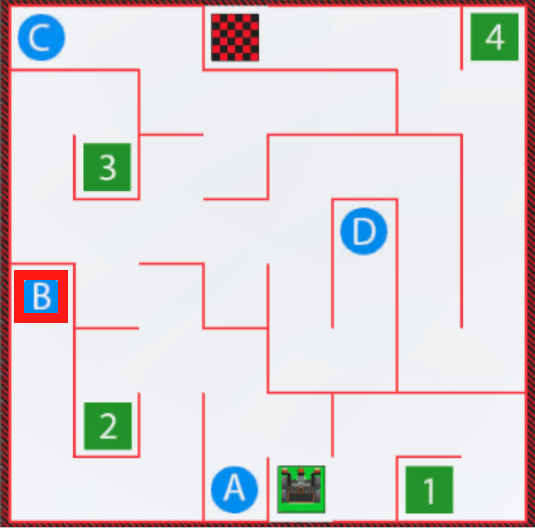
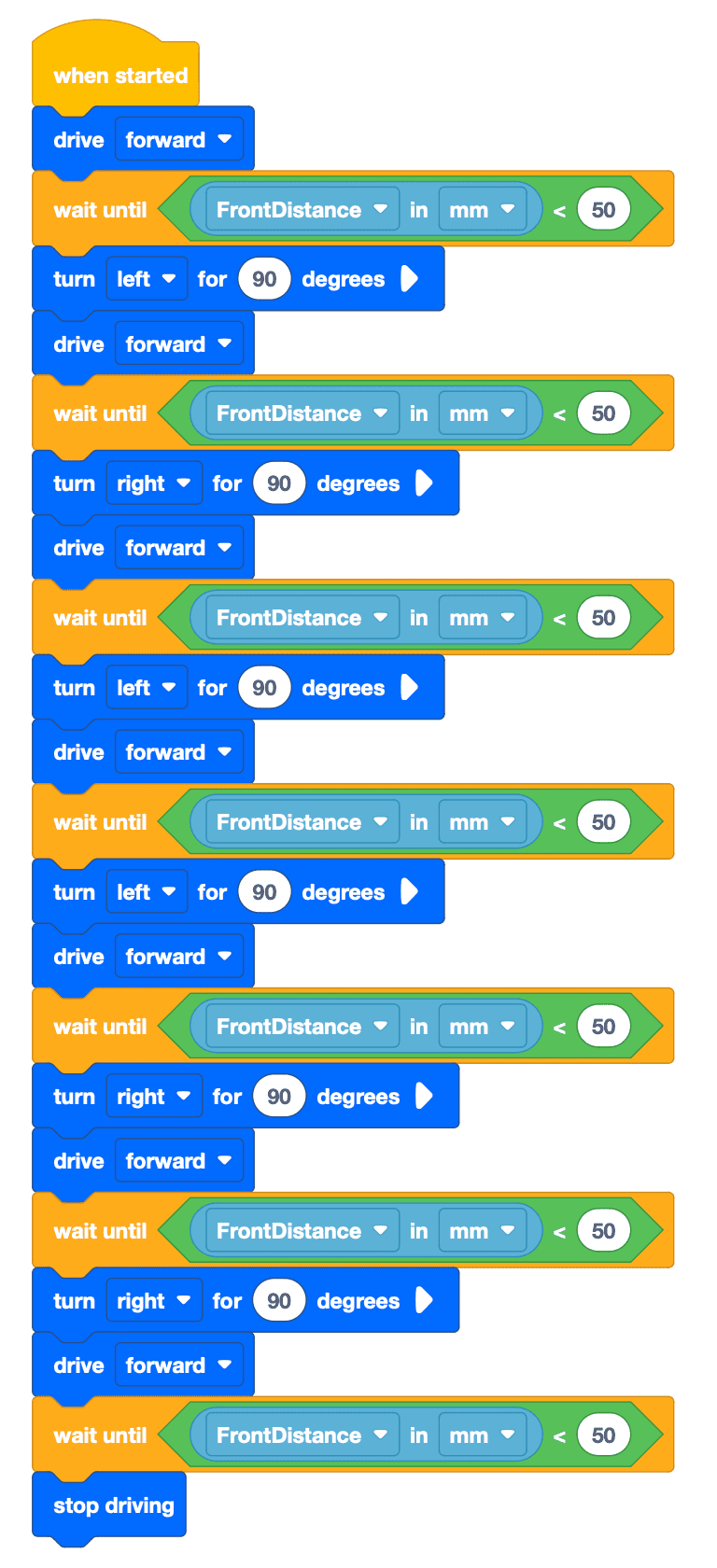
- สร้างโครงการ VEXcode VR ต่อไปนี้โดยใช้บล็อก VEXcode สลับบล็อกหรือการรวมกันของทั้งสองประเภท เป้าหมายของบทเรียนนี้คือการขับรถไปที่ตัวอักษร ‘B’ แต่โครงการต่อไปนี้มีข้อผิดพลาด
- เปิด Wall Maze Playground หากยังไม่ได้เปิดและดำเนินโครงการ
- สังเกตว่าหุ่นยนต์ VR ไม่ ถึงตัวอักษร ‘B’ ทำไมจะไม่ล่ะ? เรียกใช้โปรเจกต์อีกครั้งเพื่อระบุข้อผิดพลาด
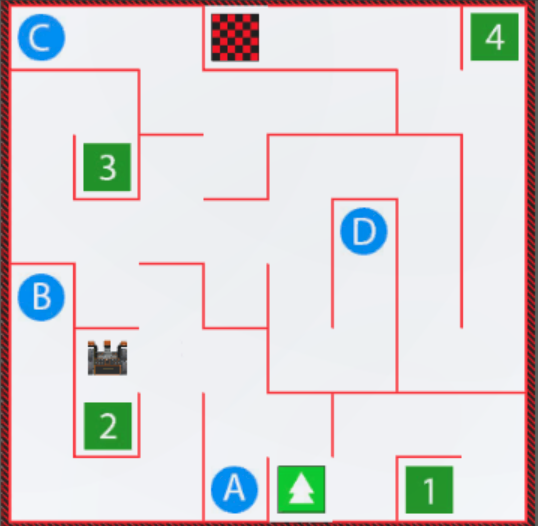
- เมื่อหุ่นยนต์ VR มาถึงจุดนี้ใน Wall Maze หุ่นยนต์ VR จะต้องเลี้ยวซ้ายเพื่อไปถึงตัวอักษร ‘B’ ในเทิร์นนี้หุ่นยนต์ VR จะอยู่ห่างจากกำแพงมากกว่าเทิร์นอื่นๆ เซ็นเซอร์ระยะทางสามารถใช้เพื่อให้หุ่นยนต์ VR สามารถเลี้ยวได้ทุกระยะห่างจากผนัง
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป