
Lección 3: Monitoreo de los valores del sensor
En la lección anterior, usaste el sensor de distancia y los bloques de comparación para que el robot VR condujera desde el principio hasta el número ‘1‘ en el patio de recreo del laberinto de pared. En esta Lección, aprenderá a monitorear los valores de los sensores en la Consola del Monitor y a hacer que el Robot VR funcione desde el inicio hasta la letra ‘B’ en el Wall Maze Playground.

Resultados de aprendizaje
- Identifique que el valor del sensor de distancia se puede monitorear seleccionando y arrastrando el bloque <Distance found object> o (Distancia desde) al icono de la consola del monitor en el área de trabajo.
- Describa el beneficio de poder monitorear los valores de los sensores al crear proyectos VEXcode VR.
Iniciar un nuevo proyecto
-
Inicie un nuevo proyecto en VEXcode VR y nombre el proyecto Unit5Lesson3.

Conduce hasta la letra "B"
-
Esta lección construirá un proyecto para que el robot de realidad virtual conduzca hasta la letra "B" en el patio de recreo del laberinto de pared utilizando el sensor de distancia.
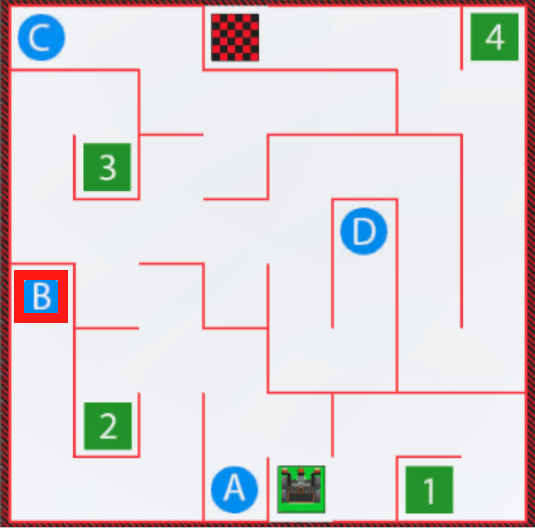
- Cree el siguiente proyecto VEXcode VR utilizando bloques VEXcode, bloques Switch o una combinación de ambos tipos. El objetivo de esta lección es conducir hasta la letra ‘B’, pero el siguiente proyecto tiene un error.

- Inicie el Wall Maze Playground si aún no está abierto y ejecute el proyecto.
- Tenga en cuenta que el robot VR NO llega a la letra "B". ¿Por qué no? Ejecute el proyecto de nuevo para identificar el error.
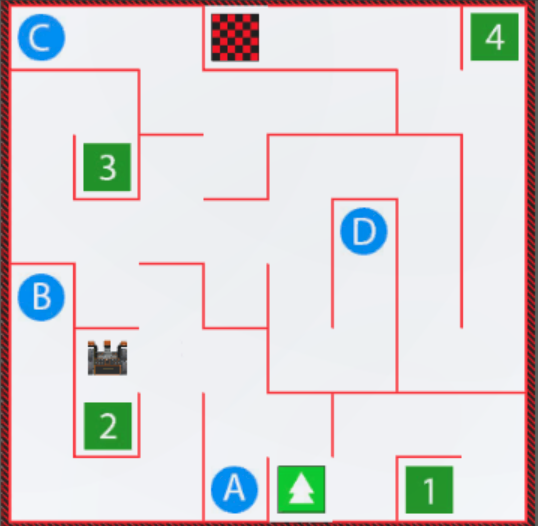
- Cuando el robot VR llega a este punto en el laberinto de la pared, el robot VR debe girar a la izquierda para llegar a la letra "B". En este giro, el robot VR está más alejado de la pared que otros giros. El sensor de distancia se puede utilizar para permitir que el robot VR realice giros a cualquier distancia de una pared.
Seleccione el botón Siguiente para continuar con el resto de esta lección.