
레슨 3: 센서 값 모니터링
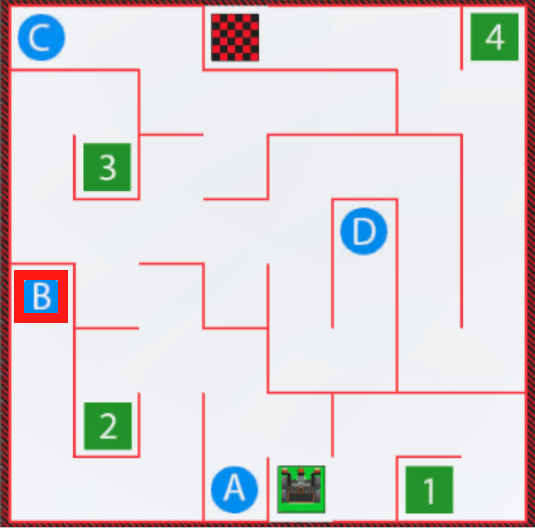
이전 수업에서는 VR 로봇이 벽 미로 놀이터의 시작 지점에서 숫자 '1'까지 주행하도록 거리 센서와 비교 블록을 사용했습니다. 이 수업에서는 모니터 콘솔의 센서 값을 모니터링하는 방법과 VR 로봇이 Wall Maze Playground의 시작 지점에서 'B' 문자까지 주행하는 방법을 알아봅니다.

학습 성과
- 작업 공간의 모니터 콘솔 아이콘에 <Distance found object> 또는 (거리) 블록을 선택하여 끌어서 놓으면 거리 센서 값을 모니터링할 수 있습니다.
- VEXcode VR 프로젝트를 생성할 때 센서 값을 모니터링할 수 있는 이점을 설명하세요.
새로운 프로젝트 시작하기
-
VEXcode VR에서 새 프로젝트를 시작하고 프로젝트 이름을 Unit5Lesson3로 지정하세요.

문자 'B'로 운전하세요
-
이 수업에서는 거리 센서를 사용하여 VR 로봇이 번 벽 미로 놀이터 의 문자 'B'까지 주행하는 프로젝트를 빌드합니다.
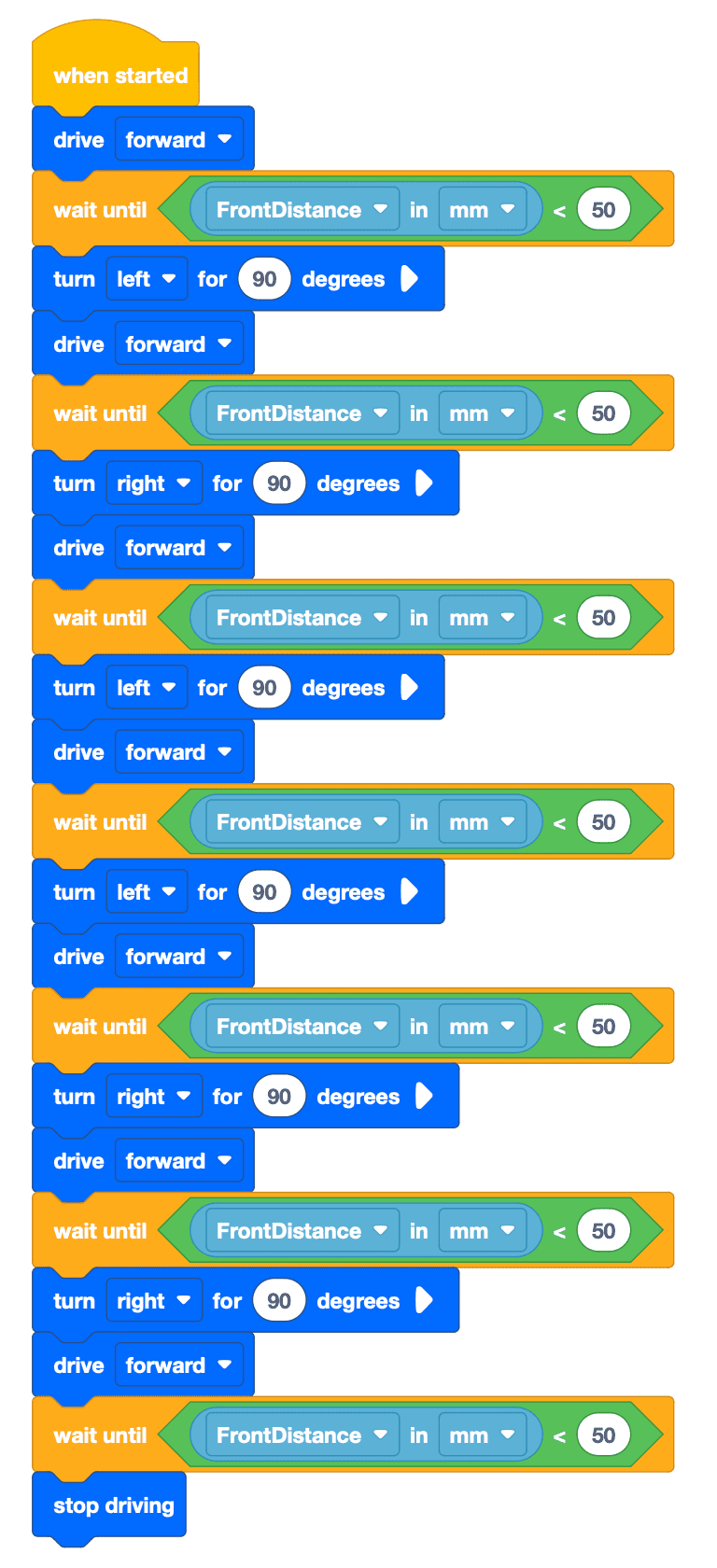
- VEXcode 블록, Switch 블록 또는 두 가지 유형을 조합하여 다음 VEXcode VR 프로젝트를 빌드하세요. 이 수업의 목표는 'B' 문자까지 가는 것이지만, 다음 프로젝트에는 오류가 있습니다.
- 아직 열려 있지 않으면 Wall Maze Playground 을 실행하고 프로젝트를 실행합니다.
- VR 로봇이 'B'라는 글자에 도달하는 데걸린다는 점에 주목하세요. 왜 안 돼? 프로젝트를 다시 실행하여 오류를 확인하세요.
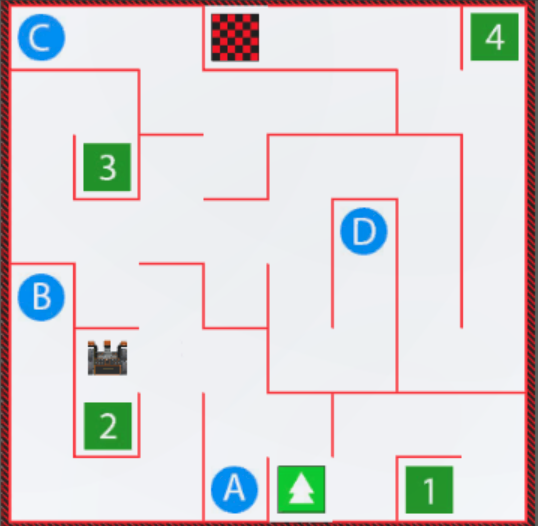
- VR 로봇이 벽 미로에서 이 지점에 도달하면 VR 로봇은 왼쪽으로 방향을 돌려 'B'라는 문자에 도달해야 합니다. 이 턴에서 VR 로봇은 다른 턴보다 벽으로부터 더 멀리 떨어져 있습니다. 거리 센서를 사용하면 VR 로봇이 벽으로부터 떨어진 거리에서도 회전할 수 있습니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.