
Lektion 3: Überwachen der Sensorwerte
In der vorherigen Lektion haben Sie den Abstandssensor und die Vergleichsblöcke für den VR-Roboter verwendet, um vom Start bis zur Nummer ‘1‘ auf dem Wall Maze Playground zu fahren. In dieser Lektion lernen Sie, wie Sie die Werte von Sensoren in der Monitorkonsole überwachen und den VR-Roboter vom Start bis zum Buchstaben "B" auf dem Wandlabyrinth-Spielplatz fahrenlassen.

Lernergebnisse
- Stellen Sie fest, dass der Wert des Abstandssensors überwacht werden kann, indem Sie den Block <Distance found object> oder (Abstand von) auf das Symbol der Überwachungskonsole im Arbeitsbereich ziehen.
- Beschreiben Sie den Vorteil, dass Sie Sensorwerte überwachen können, wenn Sie VEXcode VR-Projekte erstellen.
Neues Projekt starten
-
Starten Sie ein neues Projekt in VEXcode VR und benennen Sie das Projekt Unit5Lesson3.

Fahren Sie zum Buchstaben ‘B’
-
In dieser Lektion wird ein Projekt für den VR-Roboter erstellt, der mithilfe des Distanzsensors zum Buchstaben „B“ auf dem Wall Maze Playground fährt.
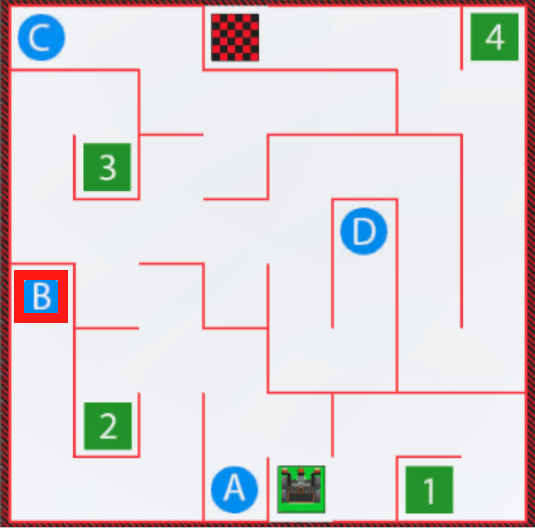
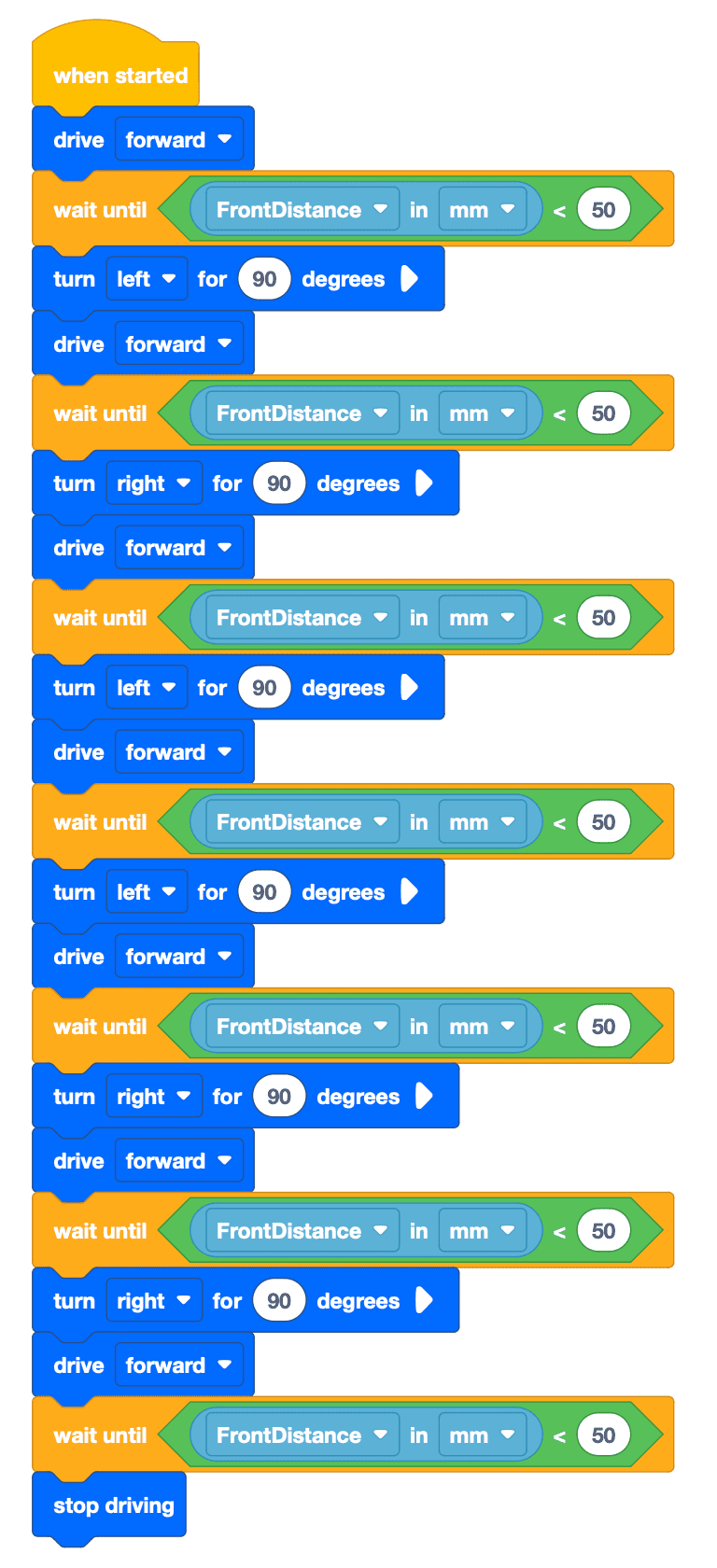
- Erstellen Sie das folgende VEXcode VR-Projekt mit VEXcode-Blöcken, Switch-Blöcken oder einer Kombination aus beiden Typen. Das Ziel dieser Lektion ist es, bis zum Buchstaben „B“ zu fahren, aber das folgende Projekt weist einen Fehler auf.
- Starten Sie den Wall Maze Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
- Beachten Sie, dass der VR-Roboter den Buchstaben „B“ NICHT erreicht. Warum nicht? Führen Sie das Projekt erneut aus, um den Fehler zu identifizieren.
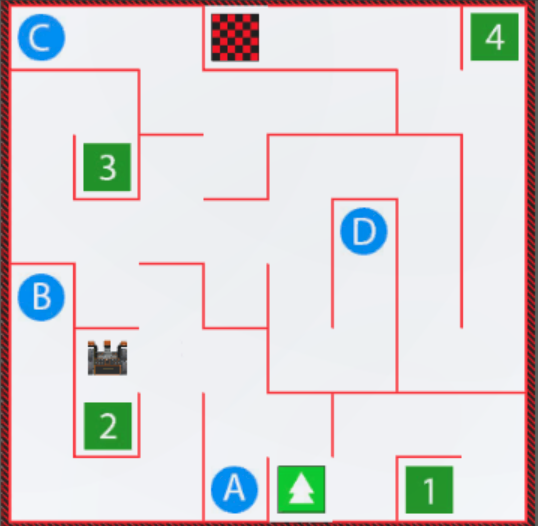
- Wenn der VR-Roboter diesen Punkt im Wandlabyrinth erreicht, muss der VR-Roboter nach links abbiegen, um den Buchstaben „B“ zu erreichen. In dieser Kurve ist der VR-Roboter weiter von der Wand entfernt als andere Kurven. Der Abstandssensor kann verwendet werden, damit der VR-Roboter sich in beliebiger Entfernung von einer Wand drehen kann.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.