
Leçon 3 : Surveillance des valeurs des capteurs
Dans la leçon précédente, vous avez utilisé le capteur de distance et les blocs de comparaison pour le robot VR pour conduire du début au numéro « 1 » sur le terrain de jeu du labyrinthe mural. Dans cette leçon, vous apprendrez à surveiller les valeurs des capteurs de la console de surveillance et à faire conduire le robot VR du début à la lettre « B » sur le terrain de jeu du labyrinthe mural.

Résultats d'apprentissage
- Identifiez que la valeur du capteur de distance peut être surveillée en sélectionnant et en faisant glisser le bloc <Distance found object> ou (Distance from) vers l'icône de la console de surveillance dans l'espace de travail.
- Décrivez l'avantage de pouvoir surveiller les valeurs des capteurs lors de la création de projets VEXcode VR.
Démarrer un nouveau projet
-
Lancez un nouveau projet dans VEXcode VR et nommez le projet Unit5Lesson3.

Conduisez jusqu'à la lettre « B »
-
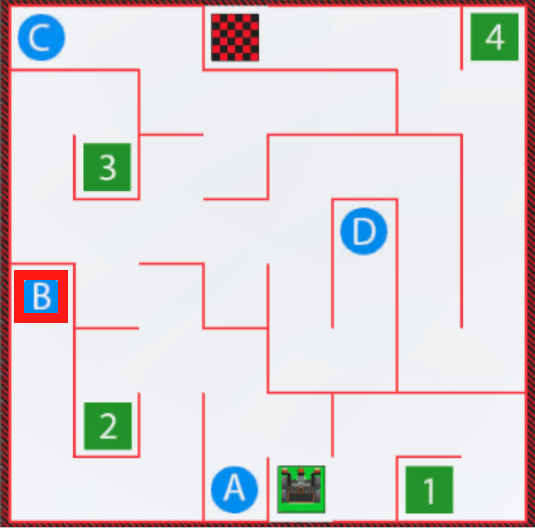
Cette leçon construira un projet pour que le robot VR puisse conduire à la lettre « B » sur le terrain de jeu du labyrinthe mural à l' aide du capteur de distance.
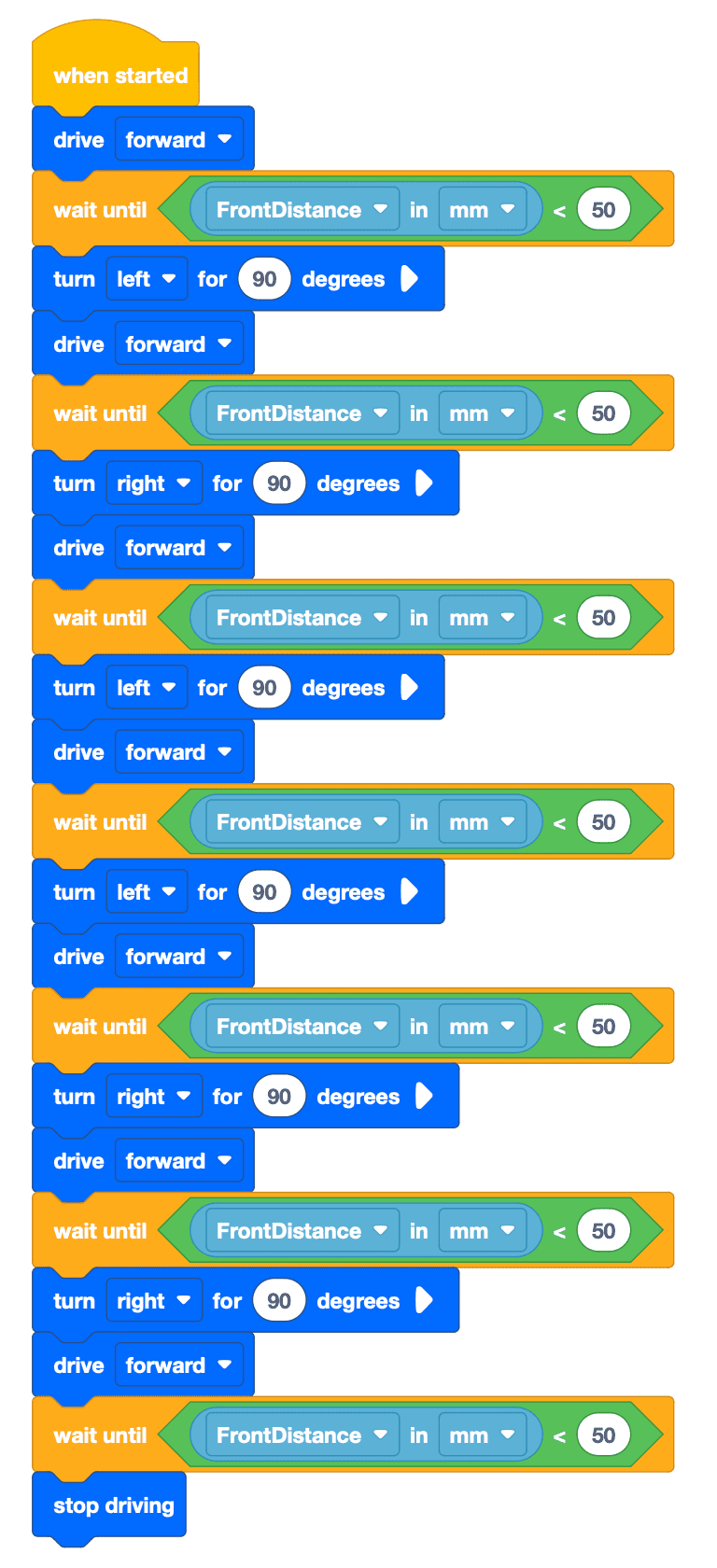
- Créez le projet VEXcode VR suivant à l'aide de blocs VEXcode, de blocs Switch ou d'une combinaison des deux types. Le but de cette leçon est de conduire à la lettre « B », mais le projet suivant a une erreur.
- Lancez le terrain de jeu Wall Maze s'il n'est pas déjà ouvert et exécutez le projet.
- Notez que le robot VR N' ATTEINT PAS la lettre « B ». Pourquoi pas ? Exécutez à nouveau le projet pour identifier l'erreur.
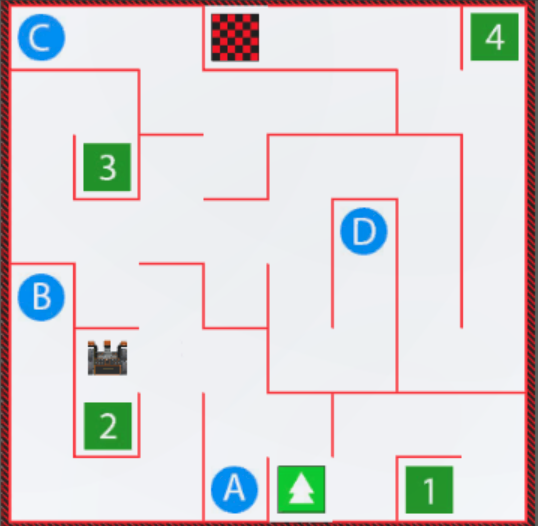
- Lorsque le robot VR atteint ce point dans le labyrinthe mural, le robot VR doit tourner à gauche pour atteindre la lettre « B ». À ce virage, le robot VR est plus éloigné du mur que les autres virages. Le capteur de distance peut être utilisé pour permettre au robot VR de faire des virages à n'importe quelle distance d'un mur.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.