
পাঠ ৩: সেন্সর মান পর্যবেক্ষণ
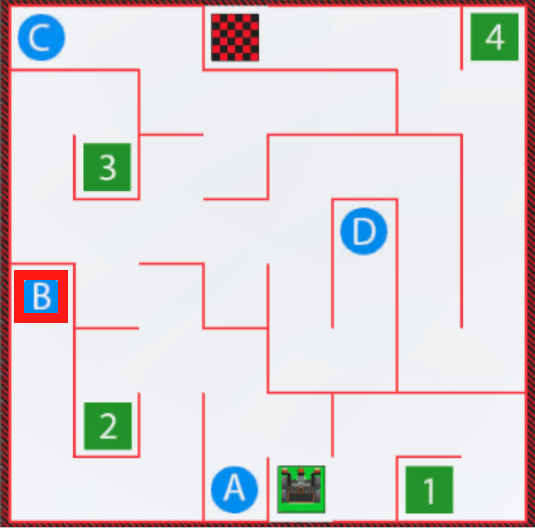
আগের পাঠে, আপনি ওয়াল মেজ প্লেগ্রাউন্ড-এ শুরু থেকে '1' নম্বরে গাড়ি চালানোর জন্য VR রোবটের জন্য দূরত্ব সেন্সর এবং তুলনা ব্লক ব্যবহার করেছিলেন। এই পাঠে, আপনি শিখবেন কিভাবে মনিটর কনসোলে সেন্সর থেকে মানগুলি পর্যবেক্ষণ করতে হয় এবং ওয়াল মেজ প্লেগ্রাউন্ড-এ শুরু থেকে 'B' অক্ষর পর্যন্ত VR রোবট ড্রাইভ রাখতে হয়।

শেখার ফলাফল
- ওয়ার্কস্পেসে মনিটর কনসোল আইকনে <Distance found object> অথবা (Distance from) ব্লক নির্বাচন করে টেনে এনে দূরত্ব সেন্সরের মান পর্যবেক্ষণ করা যেতে পারে তা শনাক্ত করুন।
- VEXcode VR প্রকল্প তৈরি করার সময় সেন্সর মান পর্যবেক্ষণ করতে পারার সুবিধা বর্ণনা করুন।
একটি নতুন প্রকল্প শুরু করুন
-
VEXcode VR-এ একটি নতুন প্রকল্প শুরু করুন এবং প্রকল্পটির নাম দিন Unit5Lesson3।

'বি' অক্ষরে ড্রাইভ করুন
-
এই পাঠটি দূরত্ব সেন্সর ব্যবহার করে ওয়াল মেজ প্লেগ্রাউন্ড এ 'B' অক্ষরে গাড়ি চালানোর জন্য VR রোবটের জন্য একটি প্রকল্প তৈরি করবে।
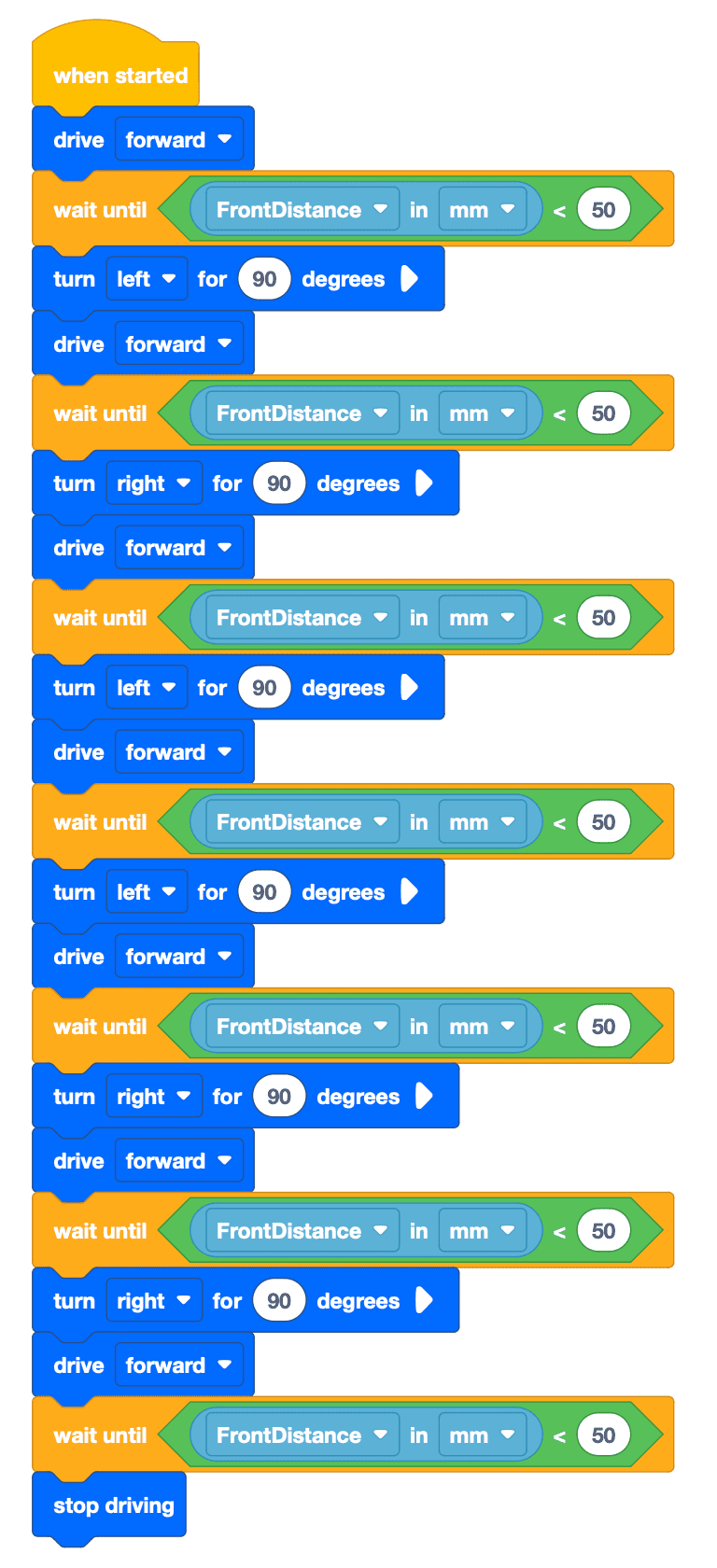
- VEXcode ব্লক, সুইচ ব্লক, অথবা উভয় ধরণের সংমিশ্রণ ব্যবহার করে নিম্নলিখিত VEXcode VR প্রকল্পটি তৈরি করুন। এই পাঠের লক্ষ্য হল 'B' অক্ষরে ড্রাইভ করা, কিন্তু নিম্নলিখিত প্রকল্পে একটি ত্রুটি রয়েছে।
- ওয়াল মেজ প্লেগ্রাউন্ড চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
- লক্ষ্য করুন যে VR রোবটটি 'B' অক্ষরেপৌঁছায় না। কেন নয়? ত্রুটি সনাক্ত করতে আবার প্রকল্প চালান.
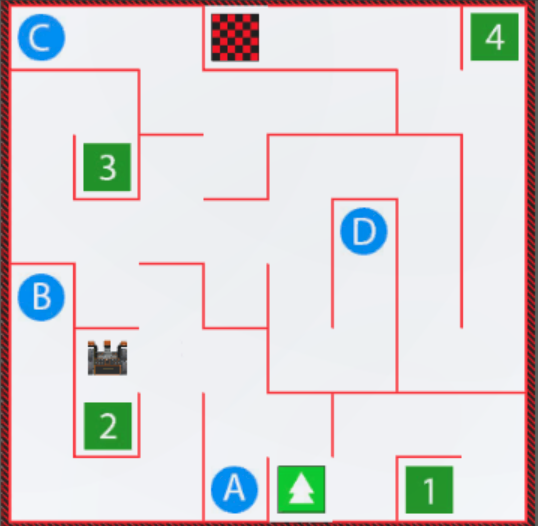
- যখন VR রোবট ওয়াল গোলকধাঁধার এই বিন্দুতে পৌঁছায়, তখন VR রোবটটিকে 'B' অক্ষরে পৌঁছানোর জন্য বাম দিকে ঘুরতে হবে। এই মোড়ে, ভিআর রোবট অন্যান্য বাঁকগুলির তুলনায় প্রাচীর থেকে আরও দূরে। দূরত্ব সেন্সরটি ভিআর রোবটকে দেয়াল থেকে দূরে যেকোনো দূরত্বে বাঁক নেওয়ার অনুমতি দেওয়ার জন্য ব্যবহার করা যেতে পারে।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।